洛谷—— P1126 机器人搬重物
https://www.luogu.org/problem/show?pid=1126
题目描述
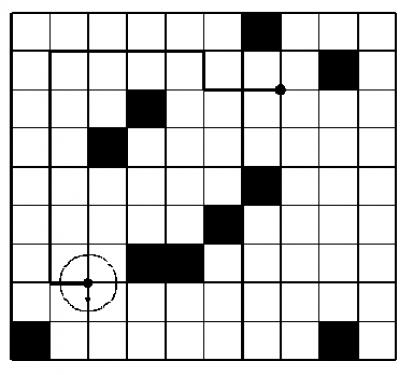
机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径1.6米的球。在试验阶段,机器人被用于在一个储藏室中搬运货物。储藏室是一个N*M的网格,有些格子为不可移动的障碍。机器人的中心总是在格点上,当然,机器人必须在最短的时间内把物品搬运到指定的地方。机器人接受的指令有:向前移动1步(Creep);向前移动2步(Walk);向前移动3步(Run);向左转(Left);向右转(Right)。每个指令所需要的时间为1秒。请你计算一下机器人完成任务所需的最少时间。
输入输出格式
输入格式:
输入的第一行为两个正整数N,M(N,M<=50),下面N行是储藏室的构造,0表示无障碍,1表示有障碍,数字之间用一个空格隔开。接着一行有四个整数和一个大写字母,分别为起始点和目标点左上角网格的行与列,起始时的面对方向(东E,南S,西W,北N),数与数,数与字母之间均用一个空格隔开。终点的面向方向是任意的。
输出格式:
一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出-1。
输入输出样例
9 10
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 1 0
0 0 0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 1 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 1 0
7 2 2 7 S
12 搜索入门中,ε=(´ο`*))),麻烦又恶心,广搜每次每种走法、
注意的几点:黑格子的左侧,左上,上方的格子都不能去,(意会一下),
如果某个点相当前方向不能走i步,则一定不能走i+1步,已经被阻断。
方向改变多模拟几次、
#include <cstdio>
#include <queue> bool vis[][][];
int n,m,map[][];
int arrivex,arrivey;
int fx[]={-,,,};
int fy[]={,-,,};
struct Node_pos {
int x,y,step;
int direction;
}now;
std::queue<Node_pos>que; inline bool can_go(Node_pos now)
{
if(now.x>=n||now.y>=m||now.x<||now.y<) return false;
if(vis[now.x][now.y][now.direction]||vis[now.x+][now.y+][now.direction]) return ;
if(vis[now.x+][now.y][now.direction]||vis[now.x][now.y+][now.direction]) return ;
if(map[now.x][now.y]||map[now.x+][now.y]||map[now.x][now.y+]||map[now.x+][now.y+]) return ;
return true;
} inline void read(int &x)
{
x=; register char ch=getchar();
for(;ch>''||ch<'';) ch=getchar();
for(;ch>=''&&ch<='';ch=getchar()) x=x*+ch-'';
} int AC()
{
read(n),read(m);
for(int x,i=; i<=n; ++i)
for(int j=; j<=m; ++j)
{
read(map[i][j]);
if(map[i][j]) map[i][j-]=map[i-][j]=map[i-][j-]=;
}
read(now.x);read(now.y);
read(arrivex);read(arrivey);
char s[];scanf("%s",s);
switch (s[]) {
case 'N': now.direction=;break;
case 'W': now.direction=;break;
case 'S': now.direction=;break;
case 'E': now.direction=;break;
}
que.push(now);
vis[now.x][now.y][now.direction]=;
for(Node_pos to;!que.empty();)
{
to=now=que.front(); que.pop(); // printf("%d %d\n",now.x,now.y); if(now.x==arrivex&&now.y==arrivey)
{ printf("%d\n",now.step); return ; }
for(int i=; i<; ++i)
{
to.x+=fx[now.direction];
to.y+=fy[now.direction];
if(map[to.x][to.y]||to.x<||to.y<||to.x>=n||to.y>=m) break;
// if(!can_go(to)) break;
to.step=now.step+;
// vis[to.x+1][to.y][now.direction]=1;
// vis[to.x][to.y+1][now.direction]=1;
// vis[to.x+1][to.y+1][now.direction]=1; if(to.x==arrivex&&to.y==arrivey)
{ printf("%d\n",to.step); return ; }
else if(!vis[to.x][to.y][now.direction])
{
vis[to.x][to.y][now.direction]=;
que.push(to);
}
} to=now;
if(!vis[now.x][now.y][now.direction+&])
{
to.direction=now.direction+&;
vis[to.x][to.y][to.direction]=;
to.step=now.step+; que.push(to);
}
if(!vis[now.x][now.y][now.direction+&])
{
to.direction=now.direction+&;
vis[to.x][to.y][to.direction]=;
to.step=now.step+; que.push(to);
}
} puts("-1");
return ;
} int Hope=AC();
int main(){;}
洛谷—— P1126 机器人搬重物的更多相关文章
- 洛谷P1126 机器人搬重物
洛谷1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格, ...
- 洛谷——P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- 洛谷 P1126 机器人搬重物 (BFS)
题目链接:https://www.luogu.org/problemnew/show/P1126 吐槽:这题很阴险 一开始没把格子图转化成点图:30分 转化成点图,发现样例过不去,原来每步要判断vis ...
- 洛谷P1126 机器人搬重物【bfs】
题目链接:https://www.luogu.org/problemnew/show/P1126 题意: 给定一个n*m的方格,机器人推着直径是1.6的球在格子的线上运动. 每一秒钟可以向左转,向右转 ...
- 洛谷P1126机器人搬重物[BFS]
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
- 洛谷 P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径 $1.6 米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个 N×MN \times MN×M ...
- luogu P1126 机器人搬重物 题解
luogu P1126 机器人搬重物 题解 题目描述 机器人移动学会(\(RMI\))现在正尝试用机器人搬运物品.机器人的形状是一个直径\(1.6\)米的球.在试验阶段,机器人被用于在一个储藏室中搬运 ...
- P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- luogu P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
随机推荐
- Myeclipse快捷键备忘
1.编辑类 Ctrl+定义好的类名 链接到你定义好的类的窗口 Ctrl + / 为选中的一段代码加上或去掉注释符 // (必须选中代码块) Ctrl ...
- 弗拉特利定律:Illumina怎样缔造基因革命
蕾妮·瓦林特(Renee Valint)的女儿谢尔碧(Shelby)在2000年出生时.看起来虚弱无力,就如同一仅仅耷拉着的布娃娃.谢尔碧学着走路和说话,但学得很慢.错过了儿童发展的重要阶段.到4岁时 ...
- luogu3369 【模板】 普通平衡树 Splay
题目大意 维护一个数据结构,满足以下操作: 插入x数 删除x数(若有多个相同的数,因只删除一个) 查询x数的排名(排名定义为比当前数小的数的个数+1.若有多个相同的数,因输出最小的排名) 查询排名为x ...
- 网络 - TCP/IP四层模型,面向生产
TCP.IP四层模型 (网络接口层,网际互联层,传输层,应用层.) (左边是车模,右边是实际生产的车.) 物理层,负责0101比特流传递. 数据链路层,MAC地址负责局域网,内网通信.MAC地址,由4 ...
- [HTML] 微信wap开发---页面自适应大小
<meta name="viewport" content="width=device-width, initial-scale=0.5, minimum-scal ...
- 10-XML
今日知识 1. xml * 概念 * 语法 * 解析 xml概念 1. 概念:Extensible Markup Language 可扩展标记语言 * 可扩展:标签都是自定义的. <user&g ...
- BZOJ 3060 Kruskal
思路: 把from&to都>k的直接加边 剩下的如果是一棵树就加. 否则ans++ (我的代码写的是反着的 不过意思都一样) //By SiriusRen #include <cs ...
- C - Elephant(贪心)
Problem description An elephant decided to visit his friend. It turned out that the elephant's house ...
- ansible usually
链接地址:https://my.oschina.net/kangvcar/blog/1830155
- JavaScript操作HTML&CSS简单入门
- Java攻城狮学习路线 - 一. JavaScript基础 输出 使用 window.alert() 弹出警告框. 使用 document.write() 方法将内容写到 HTML 文档中. 使用 ...