ROS-SLAM仿真-hector
前言:hector_slam可以很好的在空中机器人,手持构图设备及特种机器人中运行。
hector_slam不需要订阅里程计信息/odmo消息,而是直接使用激光估算里程计信息,因此,当机器人速度较快时会发生打滑现象,导致建图效果出现误差。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、安装hector_slam功能包
ros中已集成了hector_slam功能包
sudo apt-get install ros-kinetic-hector-slam
二、在Gzebo中仿真SLAM
2.1 启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launchroslaunch mrobot_laser_nav_gazebo.launch
2.2 启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch hector_demo.launch
2.3 启动键盘控制
roslaunch mrobot_teleop mrobot_teleop.launch
-----------------------------------------
显示如下:
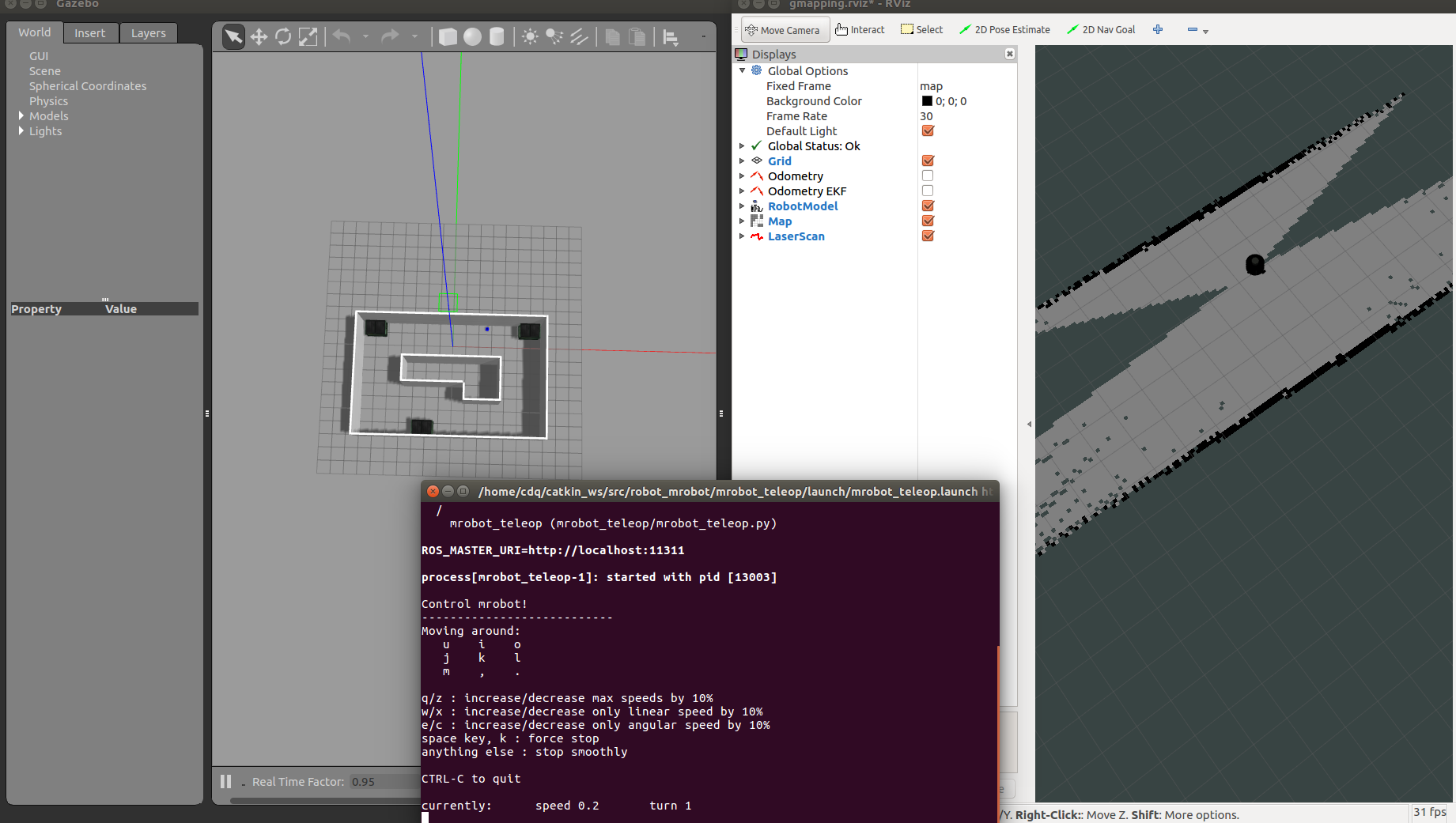
-END-
ROS-SLAM仿真-hector的更多相关文章
- 【ros】rplidar Hector Slam
想用rplidar跑一下hector slam,在网上发现了几个教程写的都不错,但是亲测发现都有点不足,综合了一下,进行补充. 1. 安装ros 和 创建工作空间 http://blog.csdn.n ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- 论文阅读:hector_slam: A Flexible and Scalable SLAM System with Full 3D Motion Estimation.
参考:<A Flexible and Scalable SLAM System with Full 3D Motion Estimation.> 该论文是ROS中hector_mappin ...
- 视觉SLAM漫淡(二):图优化理论与g2o的使用
视觉SLAM漫谈(二):图优化理论与g2o的使用 1 前言以及回顾 各位朋友,自从上一篇<视觉SLAM漫谈>写成以来已经有一段时间了.我收到几位热心读者的邮件.有的希望我介绍一下当前 ...
- 2D激光SLAM算法比较+cartographer
Hector slam: Hector slam利用高斯牛顿方法解决scan-matching问题,对传感器要求较高. 缺点:需要雷达(LRS)的更新频率较高,测量噪声小.所以在制图过程中,需要rob ...
- ROS机器人导航一 : 从英雄联盟到ROS导航
写在前面: 这是这个系列的第一篇 本系列主要从零开始深入探索ROS(机器人操作系统)的导航和规划. 这个系列的目标,是让大家了解: 1.ROS的导航是怎么实现的 2.认识ROS里各种已有的导航算法,清 ...
- ROS机器人操作系统相关书籍、资料和学习路径
作者:Top Liu链接:https://zhuanlan.zhihu.com/p/30391098来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 本文是易科机器人实验 ...
- stage_ros的world文件配置方法
官方文档参阅:http://rtv.github.io/Stage/modules.html stage_ros是一个基于stage的2D模拟器,用于ROS的仿真测试.虽然现在越来越多的人在使用gaz ...
- rplidar & hector slam without odometry
接上一篇:1.rplidar测试 方式一:测试使用rplidar A2跑一下手持的hector slam,参考文章:用hector mapping构建地图 但是roslaunch exbotxi_br ...
随机推荐
- angular实现动态的留言板案例
<!DOCTYPE html> <html> <head lang="en"> <meta charset="UTF-8&quo ...
- poj3083 Children of the Candy Corn 深搜+广搜
这道题有深搜和广搜.深搜还有要求,靠左或靠右.下面以靠左为例,可以把简单分为上北,下南,左西,右东四个方向.向东就是横坐标i不变,纵坐标j加1(i与j其实就是下标).其他方向也可以这样确定.通过上一步 ...
- sql中数据库连接与断开式连接有什么区别?
连接式指的是对数据的操作在 conn.Open() 与 conn.Close()之间: 断开式连接指的是 conn.Open()打开连接之后,先将数据放入adapter中,然后关闭连接(conn.Cl ...
- 编码和解码(字符串与byte[]之间的转换)
资源来自互联网http://www.cnblogs.com/dabaopku/archive/2012/02/27/2370446.html 非常蛋疼的事情, google 和 baidu 在编码是分 ...
- PCL:PCL可视化显示点云
(1):引用:仅仅是简单的显示点云,可以使用CloudViewer类.这个类非常简单易用.但要注意,它不是线程安全的.如果要用于多线程,还要参考PCLVisualizer. 需要注意的是,PointC ...
- 前端web通过flask操作数据库-增删改查
后端python代码: #coding:utf8 from flask import Flask,request,render_template import pymysql as mysql imp ...
- RabbitMQ学习之ConntectionFactory与Conntection的认知
在发送和接收消息重要的类有:ConnectionFactory, Connection,Channel和 QueueingConsumer. ConntectionFactory类是方便创建与AMQP ...
- required输入框为必填项
required <input type="text" placeholder="cat photo URL" required>
- 企业级任务调度框架Quartz(6) 任务调度器(Scheduler)
前序: 我们已经在前面的内容能里看到了,我们用 Scheduler 来管理我们的 Job:创建并关联触发器以使 Job 能被触发执行:以及如可选择 calendar 为给定的时程安排提供更多 ...
- JS 作业
<!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <title> ...