【路径规划】OSQP曲线平滑 公式及代码
参考与前言
apollo 代码:https://github.com/ApolloAuto/apollo/tree/master/modules/planning/math/smoothing_spline
apollo readme:https://github.com/ApolloAuto/apollo/blob/master/docs/specs/qp_spline_path_optimizer.md
自我测试的代码:张聪明/OSQP_test (gitee.com)
本篇也主要基于参考二翻译而来,背景是因为 GPIR代码 里有这层做初始化,不太懂怎么干的和干啥,所以就搜索了一下,一开始一直在弄参考三使其能逐步断点debug 以让我能明了整个步骤,不过后来搜了一下看到了参考二 emm 就是我想要了解的 smooth到底是怎样编程二次规划问题的。
以下大部分翻译至参考二,其中添加了自己的思考句子(有时也可能就是问题
实际这个包的名字就:QP-Spline-Path Optimizer,基于二次规划的曲线路径优化器
方法:Quadratic programming + Spline interpolation,二次规划 + 样条差值
注意这全文都是讲的path,而不是trajectory,至于两者区别:Motion Planning 是什么 总结了下:
Path是静态的,不包括时间;Trajectory是除了路径还有其他信息可以说是时间,speed profile,这条路径上速度的变化关系
这一段是我看完了写的:emmm 看完了发现包装的太好了 以至于就算看了整个公式 对应起来都是要跳转进去的 果然是做软件一套的。但是想着用的话 这样也算是够了的。所以整体其实还是拿五次样条先生成了reference point 然后根据他们的s,l点来进行约束,cost function也已经给出
① 目标函数 Objective function
路径长度
首先路径的坐标系是以SL 也就是frenet坐标系下。其中 s 是从车辆当前位置到规划路径的长度,类似于我们会提前给定一个 我们要规划多长的距离。
样条线段
将路径拆分成 n 段。每段都用多项式表示,比如这样一个式子:
每段 i 沿着参考线的累积距离 \(d_i\) 的多项式函数公式如下:
= a_{i0} + a_{i1} \cdot s + a_{i2} \cdot s^2 + a_{i3} \cdot s^3 + a_{i4} \cdot s^4 + a_{i5} \cdot s^5 (0 \leq s \leq d_{i}) \tag{1}
\]
实际代码调用时,后者的 5 也就是五次多项式的意思
OsqpSpline2dSolver osqp_spline2d_solver(t_knots, 5);
线段的优化函数
也就是一个cost 和为速度,加速度,加加速度:
cost = \sum_{i=1}^{n} \Big( w_1 \cdot \int\limits_{0}^{d_i} (f_i')^2(s) ds + w_2 \cdot \int\limits_{0}^{d_i} (f_i'')^2(s) ds +
w_3 \cdot \int\limits_{0}^{d_i} (f_i^{\prime\prime\prime})^2(s) ds \Big)
\end{align}
\]
但实际test.cc这个代码中只对加加速度进行了weight赋值,所以最后在计算曲率 curvature的时候 smooth后的效果明显好很多(虽然点之间看不出来啥)
mutable_kernel->Add2dThirdOrderDerivativeMatrix(0.5);
将cost函数转为QP形式
QP formulation:
minimize & \frac{1}{2} \cdot x^T \cdot H \cdot x + f^T \cdot x \\
s.t. \qquad & LB \leq x \leq UB \\
& A_{eq}x = b_{eq} \\
& Ax \geq b
\end{aligned}
\]
下面是如何被优化函数objective function/cost function转成QP形式,首先我们 (1)式 可以转成向量相乘的形式,那么 \(f_i(s)\) 可以这样表示
\begin{vmatrix} 1 & s & s^2 & s^3 & s^4 & s^5 \end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\]
\(f_i'(s)\) 求导再次表示
\begin{vmatrix} 0 & 1 & 2s & 3s^2 & 4s^3 & 5s^4 \end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\]
\(f_i'(s)^2\) 两个相乘一下:
\begin{vmatrix} a_{i0} & a_{i1} & a_{i2} & a_{i3} & a_{i4} & a_{i5} \end{vmatrix}
\cdot
\begin{vmatrix} 0 \\ 1 \\ 2s \\ 3s^2 \\ 4s^3 \\ 5s^4 \end{vmatrix}
\cdot
\begin{vmatrix} 0 & 1 & 2s & 3s^2 & 4s^3 & 5s^4 \end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\]
然后就会获得这样的:
\int\limits_{0}^{d_i}
\begin{vmatrix} a_{i0} & a_{i1} & a_{i2} & a_{i3} & a_{i4} & a_{i5} \end{vmatrix}
\cdot
\begin{vmatrix} 0 \\ 1 \\ 2s \\ 3s^2 \\ 4s^3 \\ 5s^4 \end{vmatrix}
\cdot
\begin{vmatrix} 0 & 1 & 2s & 3s^2 & 4s^3 & 5s^4 \end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix} ds
\]
把常数项提到积分外面去:
\begin{vmatrix} a_{i0} & a_{i1} & a_{i2} & a_{i3} & a_{i4} & a_{i5} \end{vmatrix}
\cdot
\int\limits_{0}^{d_i}
\begin{vmatrix} 0 \\ 1 \\ 2s \\ 3s^2 \\ 4s^3 \\ 5s^4 \end{vmatrix}
\cdot
\begin{vmatrix} 0 & 1 & 2s & 3s^2 & 4s^3 & 5s^4 \end{vmatrix} ds
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\]
\cdot \int\limits_{0}^{d_i}
\begin{vmatrix}
0 & 0 &0&0&0&0\\
0 & 1 & 2s & 3s^2 & 4s^3 & 5s^4\\
0 & 2s & 4s^2 & 6s^3 & 8s^4 & 10s^5\\
0 & 3s^2 & 6s^3 & 9s^4 & 12s^5&15s^6 \\
0 & 4s^3 & 8s^4 &12s^5 &16s^6&20s^7 \\
0 & 5s^4 & 10s^5 & 15s^6 & 20s^7 & 25s^8
\end{vmatrix} ds
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\]
然后给矩阵里的都积分一下从0到\(d_i\) 积分一下 就可以获得这样的:
f'_i(s)^2 ds =\begin{vmatrix} a_{i0} & a_{i1} & a_{i2} & a_{i3} & a_{i4} & a_{i5} \end{vmatrix}
\cdot \begin{vmatrix}
0 & 0 & 0 & 0 &0&0\\
0 & d_i & d_i^2 & d_i^3 & d_i^4&d_i^5\\
0& d_i^2 & \frac{4}{3}d_i^3& \frac{6}{4}d_i^4 & \frac{8}{5}d_i^5&\frac{10}{6}d_i^6\\
0& d_i^3 & \frac{6}{4}d_i^4 & \frac{9}{5}d_i^5 & \frac{12}{6}d_i^6&\frac{15}{7}d_i^7\\
0& d_i^4 & \frac{8}{5}d_i^5 & \frac{12}{6}d_i^6 & \frac{16}{7}d_i^7&\frac{20}{8}d_i^8\\
0& d_i^5 & \frac{10}{6}d_i^6 & \frac{15}{7}d_i^7 & \frac{20}{8}d_i^8&\frac{25}{9}d_i^9
\end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\]
所以现在应该发现了:如果是五次样条曲线的导数cost函数是会获得一个\(6\times6\)的矩阵
② 约束 Constraints
初始点/end点约束
init point/初始点
假设第一个点是 (\(s_0\), \(l_0\)), (\(s_0\), \(l'_0\)) and (\(s_0\), \(l''_0\)), 其中 \(l_0\) , \(l'_0\) and \(l''_0\) 是规划初始点的横向offset及其一阶导、二阶导,可以由 \(f_i(s)\), \(f'_i(s)\), and \(f_i(s)''\) 计算得知
使用这个式子,将这些约束转为QP等式约束
\]
下面就是转换的步骤:
\begin{vmatrix} 1 & s_0 & s_0^2 & s_0^3 & s_0^4&s_0^5 \end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5}\end{vmatrix} = l_0
\]
\begin{vmatrix} 0& 1 & 2s_0 & 3s_0^2 & 4s_0^3 &5 s_0^4 \end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix} = l'_0
\]
\begin{vmatrix} 0&0& 2 & 3\times2s_0 & 4\times3s_0^2 & 5\times4s_0^3 \end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix} = l''_0
\]
其中 \(i\) 是指那段拥有初始点 \(s_0\) 的分段区,应该说是最初的那段,因为后面平滑约束的时候还有 \(f_{k+1}(s_0)\)上面三个一起形成了一个等式,即最后的形式如 式(2).
end point/结束点
与上述的initial point 初始点步骤一致,结束点 \((s_e, l_e)\) 也是已知的,而且应该是和前面的约束一致的形式,所以总一总可以得出
等式约束 \(A_{eq}x = b_{eq}\) 展开为以下形式
1 & s_0 & s_0^2 & s_0^3 & s_0^4&s_0^5 \\
0&1 & 2s_0 & 3s_0^2 & 4s_0^3 & 5s_0^4 \\
0& 0&2 & 3\times2s_0 & 4\times3s_0^2 & 5\times4s_0^3 \\
1 & s_e & s_e^2 & s_e^3 & s_e^4&s_e^5 \\
0&1 & 2s_e & 3s_e^2 & 4s_e^3 & 5s_e^4 \\
0& 0&2 & 3\times2s_e & 4\times3s_e^2 & 5\times4s_e^3
\end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
=
\begin{vmatrix}
l_0\\
l'_0\\
l''_0\\
l_e\\
l'_e\\
l''_e\\
\end{vmatrix}\tag{2}
\]
实际代码中为:
// init point constraint
mutable_constraint->Add2dPointConstraint(0, Eigen::Vector2d(spline(a, 0), spline(b, 0)));
mutable_constraint->Add2dPointDerivativeConstraint(0, Eigen::Vector2d(spline_1st(a, 0), spline_1st(b, 0)));
// end point constraint
mutable_constraint->Add2dPointConstraint(t_end, Eigen::Vector2d(spline(a, t_end), spline(b, t_end)));
mutable_constraint->Add2dPointDerivativeConstraint(t_end, Eigen::Vector2d(spline_1st(a, t_end), spline_1st(b, t_end)));
分段之间平滑约束
这部分的约束主要在于将分段点连接处进行平滑操作,比如一阶连续,二阶连续,三阶连续。
假设 \(seg_k\) 和 \(seg_{k+1}\) 是相连接的, \(seg_k\) 段累积的 s 距离值为 \(s_k\). 注意这里的 \(s_0\) 不同与前面说的为整段路径的init point初始点,而是每段自身的起点处,所以对 \(seg_k\) 来说他的累积距离 \(s_k\) 正是 \(seg_{k+1}\) 的起点 \(s_0\)
\]
以下为计算过程:
1 & s_k & s_k^2 & s_k^3 & s_k^4&s_k^5 \\
\end{vmatrix}
\cdot
\begin{vmatrix}
a_{k0} \\ a_{k1} \\ a_{k2} \\ a_{k3} \\ a_{k4} \\ a_{k5}
\end{vmatrix}
=
\begin{vmatrix}
1 & s_{0} & s_{0}^2 & s_{0}^3 & s_{0}^4&s_{0}^5 \\
\end{vmatrix}
\cdot
\begin{vmatrix}
a_{k+1,0} \\ a_{k+1,1} \\ a_{k+1,2} \\ a_{k+1,3} \\ a_{k+1,4} \\ a_{k+1,5}
\end{vmatrix}
\]
1 & s_k & s_k^2 & s_k^3 & s_k^4&s_k^5 & -1 & -s_{0} & -s_{0}^2 & -s_{0}^3 & -s_{0}^4&-s_{0}^5\\
\end{vmatrix}
\cdot
\begin{vmatrix}
a_{k0} \\ a_{k1} \\ a_{k2} \\ a_{k3} \\ a_{k4} \\ a_{k5} \\ a_{k+1,0} \\ a_{k+1,1} \\ a_{k+1,2} \\ a_{k+1,3} \\ a_{k+1,4} \\ a_{k+1,5}
\end{vmatrix}
= 0
\]
使用 \(s_0\) = 0 在上式中,然后同样添加如下的等式约束:
\\
f''_k(s_k) = f''_{k+1} (s_0)
\\
f'''_k(s_k) = f'''_{k+1} (s_0)
\]
实际代码中只添加了三阶连续:(但是三阶连续的前提不是一二阶也连续吗?)
mutable_constraint->Add2dThirdDerivativeSmoothConstraint();
对采样点的边界约束
沿着路径均匀采样 m 个点,检查这些点是否触碰到了障碍物的边界,然后将其转成QP问题的不等式约束:
\]
首先根据道路宽度和周围障碍物找到点 \((s_j, l_j)\) and \(j\in[0, m]\) 的下边界 \(l_{lb,j}\),然后不等式约束的计算如下:
1 & s_0 & s_0^2 & s_0^3 & s_0^4&s_0^5 \\
1 & s_1 & s_1^2 & s_1^3 & s_1^4&s_1^5 \\
...&...&...&...&...&... \\
1 & s_m & s_m^2 & s_m^3 & s_m^4&s_m^5 \\
\end{vmatrix} \cdot \begin{vmatrix}a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\geq
\begin{vmatrix}
l_{lb,0}\\
l_{lb,1}\\
...\\
l_{lb,m}\\
\end{vmatrix} \tag{10}
\]
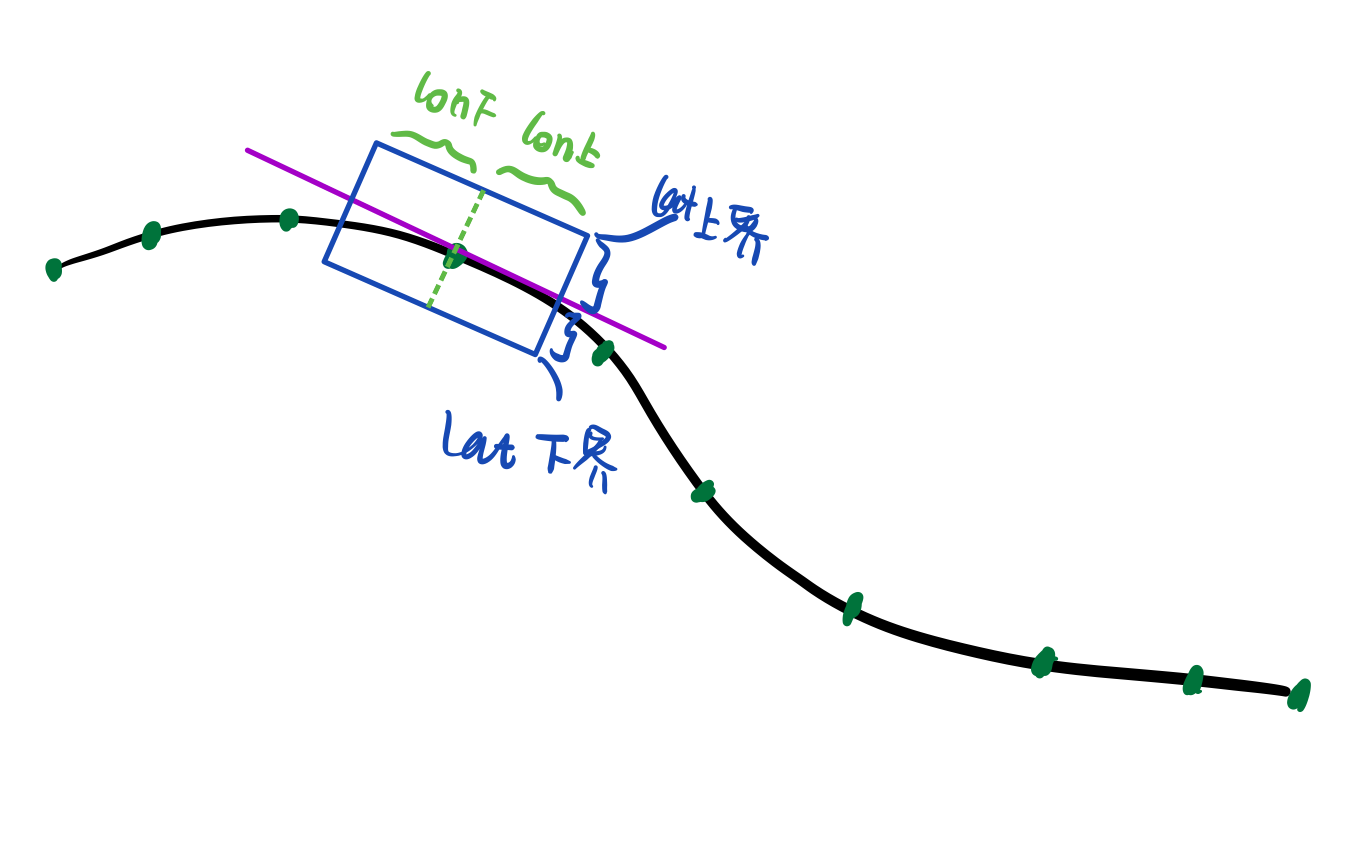
为什么会有下界?根据采样的想法应该只有上界才对,或者说下界可以为完全不进行横向采样扩张
杰哥回复:这是一个box形状,不是说从0-10是我的采样增加区间 而是以ref为0,-10 - 10采样增加区间
为什么实际代码中是横纵向都有限制?采样点扩张如上问中
lower_bound.emplace_back(d_lateral - lat_tol[i]);
lower_bound.emplace_back(d_longitudinal - lon_tol[i]); upper_bound.emplace_back(d_lateral + lat_tol[i]);
upper_bound.emplace_back(d_longitudinal + lon_tol[i]);
如此手绘图所示:
这里没有办法根据障碍物加进去边界条件?
好像可以对某一个 \(l_{ub,j}\) 进行扩大,使其表达障碍物的膨胀。但是我感觉这个点应该是说已知环境中,不包括动态障碍物,类似于在地图已经建好的这层上去做边界约束,而不是实时根据障碍物去做约束
这样的 因为输入的边界约束是station lateral boundary,其实是依据你的reference line 参考线然后有设定纵向和横向的最大便宜角度进去,比如test代码中是0.2
同样的,上界 \(l_{ub,j}\) 同样也可以以这种不等式约束计算:
-1 & -s_0 & -s_0^2 & -s_0^3 & -s_0^4&-s_0^5 \\
-1 & -s_1 & -s_1^2 & -s_1^3 & -s_1^4&-s_1^5 \\
...&...-&...&...&...&... \\
-1 & -s_m & -s_m^2 & -s_m^3 & -s_m^4&-s_m^5 \\
\end{vmatrix}
\cdot
\begin{vmatrix} a_{i0} \\ a_{i1} \\ a_{i2} \\ a_{i3} \\ a_{i4} \\ a_{i5} \end{vmatrix}
\geq
-1 \cdot
\begin{vmatrix}
l_{ub,0}\\
l_{ub,1}\\
...\\
l_{ub,m}\\
\end{vmatrix} \tag{11}
\]
③ 代码总结
首先完整的test代码可见gitee链接,此处仅将上述提到的进行说明
// solver
OsqpSpline2dSolver osqp_spline2d_solver(t_knots, 5);
mutable_kernel->Add2dReferenceLineKernelMatrix(t_coord, ref_ft, 0.5);
// 添加连续平滑约束 三阶
mutable_constraint->Add2dThirdDerivativeSmoothConstraint();
// 添加初始点
mutable_constraint->Add2dPointConstraint(0, Eigen::Vector2d(spline(a, 0), spline(b, 0)));
mutable_constraint->Add2dPointDerivativeConstraint(0, Eigen::Vector2d(spline_1st(a, 0), spline_1st(b, 0)));
// 添加end point
double t_end = t_coord.back();
mutable_constraint->Add2dPointConstraint(t_end, Eigen::Vector2d(spline(a, t_end), spline(b, t_end)));
mutable_constraint->Add2dPointDerivativeConstraint(t_end, Eigen::Vector2d(spline_1st(a, t_end), spline_1st(b, t_end)));
// 添加边界约束
mutable_constraint->Add2dStationLateralBoundary(t_coord, ref_ft, ref_theta,lon_tol, lat_tol);
实际上看上去 数学公式都被隐去了 是因为osqp这层 apollo加了自己的spline,所以最后main呈现的就是这样的形式,如果跳转各个部分的更为仔细的可以发现更多,比如添加边界约束:
bool Spline2dConstraint::Add2dStationLateralBoundary(
const std::vector<double>& t, const vector_Eigen<Eigen::Vector2d>& ref_xy,
const std::vector<double>& ref_theta, const std::vector<double>& lon_tol,
const std::vector<double>& lat_tol) {
if (t.size() != ref_xy.size() || ref_xy.size() != ref_theta.size() ||
ref_theta.size() != lon_tol.size() || lon_tol.size() != lat_tol.size()) {
return false;
}
Eigen::MatrixXd sl_constraints =
Eigen::MatrixXd::Zero(2 * t.size(), total_param_);
std::vector<double> lower_bound, upper_bound;
for (uint32_t i = 0; i < t.size(); ++i) {
const uint32_t index = FindSegStartIndex(t[i]);
const double d_lateral = SignDistance(ref_xy[i], ref_theta[i]);
const double d_longitudinal =
SignDistance(ref_xy[i], ref_theta[i] - M_PI_2);
const double t_corrected = t[i] - t_knots_[index];
std::vector<double> lateral_coef = AffineCoef(ref_theta[i], t_corrected);
std::vector<double> longitudianl_coef =
AffineCoef(ref_theta[i] - M_PI_2, t_corrected);
const uint32_t index_offset = index * spline_param_num_;
// 构建公式10,11的左边矩阵
for (uint32_t j = 0; j < spline_param_num_; ++j) {
sl_constraints(2 * i, index_offset + j) = lateral_coef[j];
sl_constraints(2 * i, index_offset + total_param_ / 2 + j) =
lateral_coef[spline_param_num_ + j];
sl_constraints(2 * i + 1, index_offset + j) = longitudianl_coef[j];
sl_constraints(2 * i + 1, index_offset + total_param_ / 2 + j) =
longitudianl_coef[spline_param_num_ + j];
}
lower_bound.emplace_back(d_lateral - lat_tol[i]);
lower_bound.emplace_back(d_longitudinal - lon_tol[i]);
upper_bound.emplace_back(d_lateral + lat_tol[i]);
upper_bound.emplace_back(d_longitudinal + lon_tol[i]);
}
return coxy_constraint_.AddConstraint(sl_constraints, lower_bound,
upper_bound);
}
由这里我们可以看到公式 10 和公式 11的矩阵形式的构建
④ 效果示意
运行上面给的Gitee代码,可以得到下面这样一幅图:
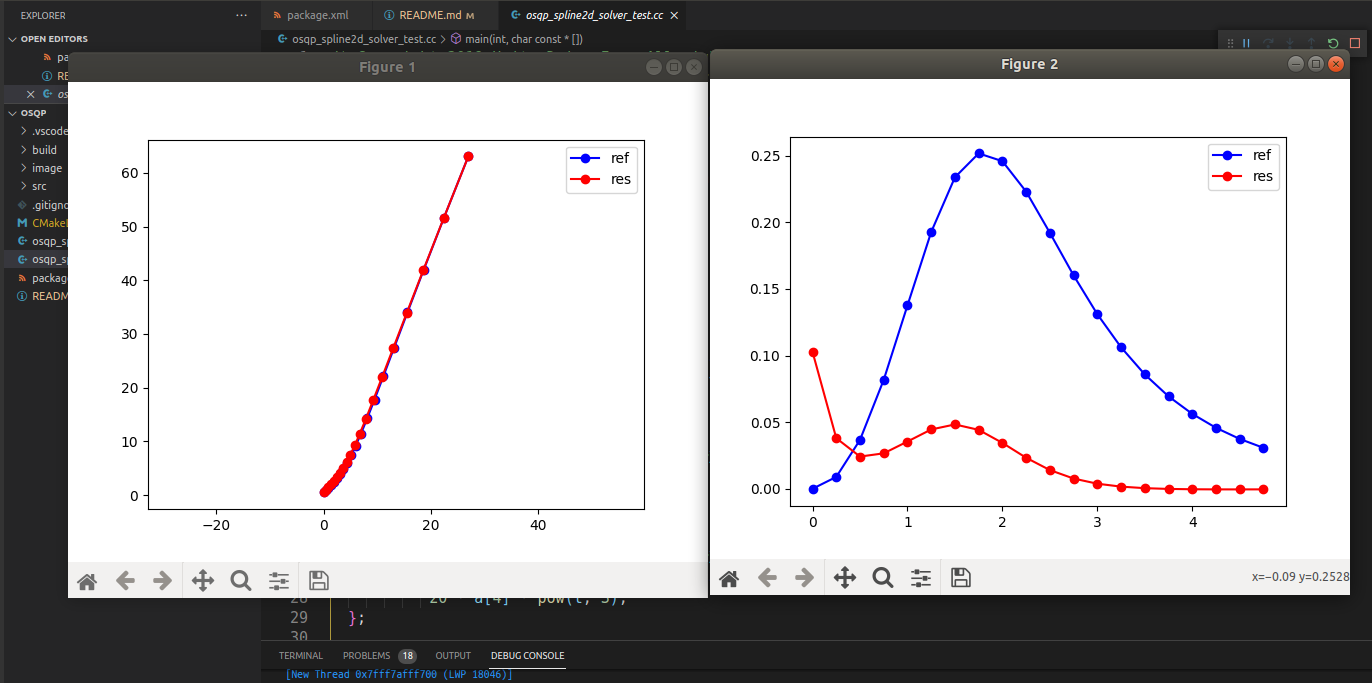
ref就是每小段都是五次样条出来的,做图就是sl坐标系下生成出来的,右图为计算了他们的每个点连接处的曲率,可以看到经过osqp spline曲率约束 cost 都有明显的生效(虽然在这个例子中展现的不大)
【路径规划】OSQP曲线平滑 公式及代码的更多相关文章
- ROS源码解读(二)--全局路径规划
博客转载自:https://blog.csdn.net/xmy306538517/article/details/79032324 ROS中,机器人全局路径规划默认使用的是navfn包 ,move_b ...
- 【路径规划】 Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame (附python代码实例)
参考与前言 2010年,论文 Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame 地址:https ...
- move_base的 局部路径规划代码研究
base_local_planner teb_local_planner parameter code g2o base_local_planner ROS wiki Given a plan to ...
- move_base的全局路径规划代码研究
algorithmn parameter code 主要是以下三个函数 计算所有的可行点 怎么计算一个点的可行点 从可行点中计算路径path todo algorithmn 算法的解释 Dijkstr ...
- DWA局部路径规划算法论文阅读:The Dynamic Window Approach to Collision Avoidance。
DWA(动态窗口)算法是用于局部路径规划的算法,已经在ROS中实现,在move_base堆栈中:http://wiki.ros.org/dwa_local_planner DWA算法第一次提出应该是1 ...
- (Bezier)贝塞尔曲在路径规划的运用
前言 之前被安排了活,一个局部区域机器运动控制的工作,大致是一个机器位于一个极限区域时候,机器要进入一个特殊的机制,使得机器可以安全的走出来.其中用到了bezier曲线进行优化路径,今天写一下,正好也 ...
- 基于谷歌地图的Dijkstra算法水路路径规划
最终效果图如下: 还是图.邻接表,可以模拟出几个对象=>节点.边.路径.三个类分别如下: Node 节点: using System; using System.Collections.Gene ...
- Unity路径规划
Unity路径规划 转自:http://www.cnblogs.com/zsb517/p/4090629.html 背景 酷跑游戏中涉及到弯道.不规则道路. 找来一些酷跑游戏的案例来看,很多都是只有 ...
- iOS百度地图路径规划和POI检索详细总结-b
路径规划.png 百度地图的使用 百度地图API的导入网上说了许多坑,不过我遇到的比较少,这里就放两个比较常见的吧.坑一: 奥联WIFI_xcodeproj.png 如上图所示,在infoplist里 ...
- COJ 0500 杨老师的路径规划(MST)最小生成树
杨老师的路径规划(MST) 难度级别:B: 运行时间限制:1000ms: 运行空间限制:51200KB: 代码长度限制:2000000B 试题描述 为满足同学们需求,杨老师在实验楼4层新建了好多个计算 ...
随机推荐
- python3解析FreeSWITCH会议室列表信息
操作系统 :CentOS 7.6_x64 FreeSWITCH版本 :1.10.9 Python版本:3.9.12 进行FreeSWITCH会议室相关功能开发过程中,会遇到需要解析会议室列表信息并进行 ...
- 请查收这份 6.3k star的 Java 攻城狮学习指南!
大家好,我是 Java陈序员. 自从一入 Java 开发的坑,可谓是每天过得神清气爽(水深火热). 每天不是被项目经理赶进度,就是被测试小姐姐追着改 Bug!都没有时间好好学习(摸鱼)了! 今天给大家 ...
- 关于QQ群炸了的说明
ABAP 7.5学习群不幸被腾讯封了,想要聊天的群友可以加以下两个群, ABAP 7.5历史研究小组 728466742 ABAP 7.5 备份群 582240105
- Jmeter-线程组下篇
线程组 线程组作为JMeter测试计划的核心组件之一,对于模拟并发用户的行为至关重要.线程组元件是整个测试计划的入口,所有的取样器和控制器必须放置在线程组下. 可以将线程组视为一个虚拟用户池,其中每个 ...
- golang之UrlEncode编码/UrlDecode解码
为什么需要编码和解码 1.是因为当字符串数据以url的形式传递给web服务器时,字符串中是不允许出现空格和特殊字符的: 2.因为 url 对字符有限制,比如把一个邮箱放入 url,就需要使用 urle ...
- 04.1 go-admin自动化上线到生产环境 nginx配置上线vue和go
目录 简介 基于Gin + Vue + Element UI的前后端分离权限管理系统 一. 上线思路 1.1 首先确保项目前后端在本地可以都可以正常跑起来,如果不会可以去看一下作者的视频教程 1.2 ...
- Linux中的touch命令
Linux中一个文件有3种时间属性,分别是mtime,ctime,atime: modification time (mtime) 当该文件的『内容数据』变更时,就会升级这个时间!内容数据指的是文件的 ...
- 26ObjectStream
ObjectStream ObjectOutputStream 用于将属性和内容保存到文件中,保存数据类型和值,即序列化,该流为处理流 static和transient修饰的属性无法序列化,切被序列化 ...
- Centos7安装openJdk17
yum 安装 安装 EPEL 软件源:使用以下命令安装 EPEL 软件源,它包含了 OpenJDK 17 的安装包. sudo yum install epel-release sudo yum in ...
- Swoole 实践篇之结合 WebSocket 实现心跳检测机制
原文首发链接:Swoole 实践篇之结合 WebSocket 实现心跳检测机制 大家好,我是码农先森. 引言 前段时间在 Swoole 的交流群里,有群友提问:"如何判断用户端是否在线&qu ...