Linux RN6752 驱动编写
一、概述
关于 RN6752V1 这个芯片这里就不做介绍了,看到这篇笔记的小伙伴应该都明白,虽然说 RN6752V1 芯片是 AHD 信号的解码芯片,但是也可以把芯片当做是一个 YUV 信号的 MIPI 摄像头,所以驱动的编写和 MIPI 摄像头无太大的区别。这里主要是介绍具体的函数,关于 MIPI 驱动的框架程序看我之前的笔记:Linux MIPI 摄像头驱动框架编写(RN6752解码芯片)
二、RN6752 帧格式
RN6752 支持 DVP 和 MIPI 信号,这里我主要是对 MIPI 信号的使用,当然 DVP 通信的操作也可以做参考。
寄存地配置
通过代理商提供的头文件中可以获取到相关寄存器的配置,如下所示:static const struct sensor_register rn6752_fhd_1080P25_video[] = {
{ 0x19, 0x0A }, // 视频格式检测滞后控制
{ 0x81, 0x01 }, // 打开视频解码器
{ 0xDF, 0xFE }, // 启用HD格式
{ 0xF0, 0xC0 }, // 使能 FIFO 和 144 MHz 解码器输出
{ 0xA3, 0x04 }, // 启用 HD 输出
{ 0x88, 0x40 }, // 禁用 SCLK1 输出
{ 0xF6, 0x40 }, // 禁用 SCLK3A 输出 /* 切换到ch0(默认;可选) */
{ 0xFF, 0x00 }, // 寄存器集选择
{ 0x33, 0x10 }, // 检测中的视频
{ 0x4A, 0xA8 }, // 检测中的视频
{ 0x00, 0x20 }, // internal use*
{ 0x06, 0x08 }, // internal use*
{ 0x07, 0x63 }, // 高清格式
{ 0x2A, 0x01 }, // 滤波器控制
{ 0x3A, 0x24 }, // 在SAV/EAV代码中插入通道ID
{ 0x3F, 0x10 }, // 通道ID
{ 0x4C, 0x37 }, // 均衡器
{ 0x4F, 0x03 }, // 同步控制
{ 0x50, 0x03 }, // 1080p分辨率
{ 0x56, 0x02 }, // 144M 和 BT656模式
{ 0x5F, 0x44 }, // 消隐电平
{ 0x63, 0xF8 }, // 滤波器控制
{ 0x59, 0x00 }, // 扩展寄存器存取
{ 0x5A, 0x48 }, // 扩展寄存器的数据
{ 0x58, 0x01 }, // 启用扩展寄存器写入
{ 0x59, 0x33 }, // 扩展寄存器存取
{ 0x5A, 0x23 }, // 扩展寄存器的数据
{ 0x58, 0x01 }, // 启用扩展寄存器写入
{ 0x51, 0xF4 }, // 比例因子1
{ 0x52, 0x29 }, // 比例因子2
{ 0x53, 0x15 }, // 比例因子3
{ 0x5B, 0x01 }, // H-标度控制
{ 0x5E, 0x08 }, // 启用H缩放控制
{ 0x6A, 0x87 }, // H-标度控制
{ 0x28, 0x92 }, // 剪裁
{ 0x03, 0x80 }, // 饱和
{ 0x04, 0x80 }, // 颜色
{ 0x05, 0x04 }, // 尖锐
{ 0x57, 0x23 }, // 黑色/白色拉伸
{ 0x68, 0x00 }, // coring
{ 0x37, 0x33 }, //
{ 0x61, 0x6C }, //
#ifdef USE_BLUE_SCREEN
{ 0x3A, 0x24 }, // AHD 断开链接时,屏幕为蓝色
#else
{ 0x3A, 0x2C }, // AHD 断开链接时,屏幕为黑色
{ 0x3B, 0x00 }, //
{ 0x3C, 0x80 }, //
{ 0x3D, 0x80 }, //
#endif
{ 0x2E, 0x30 }, // 强制不播放视频
{ 0x2E, 0x00 }, // 回归平常 /* mipi 连接 */
{ 0xFF, 0x09 }, // 切换到 mipi tx1
{ 0x00, 0x03 }, // enable bias
{ 0xFF, 0x08 }, // 切换到 mipi csi1
{ 0x04, 0x03 }, // csi1 和 tx1 重置
{ 0x6C, 0x11 }, // 禁用 ch 输出,打开 ch0
#ifdef USE_MIPI_4LANES
{ 0x06, 0x7C }, // mipi 4 线
#else
{ 0x06, 0x4C }, // mipi 2 线
#endif
{ 0x21, 0x01 }, // 启用 hs 时钟
{ 0x34, 0x06 }, //
{ 0x35, 0x0B }, //
{ 0x78, 0xC0 }, // ch0 的 Y/C 计数
{ 0x79, 0x03 }, // ch0 的 Y/C 计数
{ 0x6C, 0x01 }, // 启用 ch 输出
{ 0x04, 0x00 }, // csi1 和 tx1 重置完成
{ 0x20, 0xAA }, //
#ifdef USE_MIPI_NON_CONTINUOUS_CLOCK
{ 0x07, 0x05 }, // 启用非连续时钟
#else
{ 0x07, 0x04 }, // 启用连续时钟
#endif
{ 0xFF, 0x0A }, // 切换到 mipi csi3
{ 0x6C, 0x10 }, // 禁用 ch 输出;关闭 ch0~3
{REG_NULL, 0x00},
};
注意: 其他格式的寄存器我这里就不附上了,可以参考代理商提供的头文件
将配置信息存入帧列表中
static const struct rn6752_framesize rn6752_mipi_framesizes[] = {
{
.width = 1280,
.height = 720,
.max_fps = {
.numerator = 10000,
.denominator = 250000,
},
.regs = rn6752_fhd_720P25_video,
},
{
.width = 1280,
.height = 720,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.regs = rn6752_fhd_720P30_video,
},
{
.width = 1920,
.height = 1080,
.max_fps = {
.numerator = 10000,
.denominator = 250000,
},
.regs = rn6752_fhd_1080P25_video,
},
{
.width = 1920,
.height = 1080,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.regs = rn6752_fhd_1080P30_video,
},
{
.width = 1280,
.height = 960,
.max_fps = {
.numerator = 10000,
.denominator = 250000,
},
.regs = rn6752_fhd_960P25_video,
},
{
.width = 1280,
.height = 960,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.regs = rn6752_fhd_960P30_video,
}
};
配置默认帧
在 rn6752_probe 函数中存入默认支持的帧列表,如下所示static void rn6752_get_default_format(struct rn6752 *rn6752,
struct v4l2_mbus_framefmt *format)
{
format->width = rn6752->framesize_cfg[2].width; /* 设置默认宽度 */
format->height = rn6752->framesize_cfg[2].height; /* 设置默认高度 */
format->colorspace = V4L2_COLORSPACE_SRGB; /* 设置默认色彩空间为标准的 sRGB 色彩空间 */
format->code = rn6752_formats[0].code; /* 设置默认编码格式 */
format->field = V4L2_FIELD_NONE; /* 设置默认场模式 */
} /* rn6752_mipi_framesizes 是 rn6752 mipi 通信支持的所有帧格式 */
rn6752->framesize_cfg = rn6752_mipi_framesizes;
rn6752->cfg_num = ARRAY_SIZE(rn6752_mipi_framesizes);
/* 获取摄像头传感器支持的图像帧格式 */
rn6752_get_default_format(rn6752, &rn6752->format);
rn6752->frame_size = &rn6752->framesize_cfg[2]; /* 设置帧大小 */
rn6752->format.width = rn6752->framesize_cfg[2].width; /* 设置宽度 */
rn6752->format.height = rn6752->framesize_cfg[2].height; /* 设置高度 */
rn6752->fps = DIV_ROUND_CLOSEST(
rn6752->framesize_cfg[2].max_fps.denominator,
rn6752->framesize_cfg[2].max_fps.numerator); /* 设置最大帧速率 */
注意:
- 首先将所有支持的帧列表存入了 rn6752->framesize_cfg 中
- 将支持的列表数量存入 rn6752->cfg_num 中
- 将默认支持的帧格式和大小存入 rn6752->format 中,这个在用户空间可以查看
- 将默认支持的帧大小存入 rn6752->frame_size 中
- 将默认支持的帧率存入 rn6752->fps 中
- 以上这些默认变量将在后面的函数中经常用到,所以需要特别注意一下,不然很难理解数据从哪里来的
三、Media 设备节点
之前在 Media 子系统中提到过模块之间的关系查看命令media-ctl -p -d /dev/mediaX ,通过命令可以得到驱动中的一些信息,如下图所示
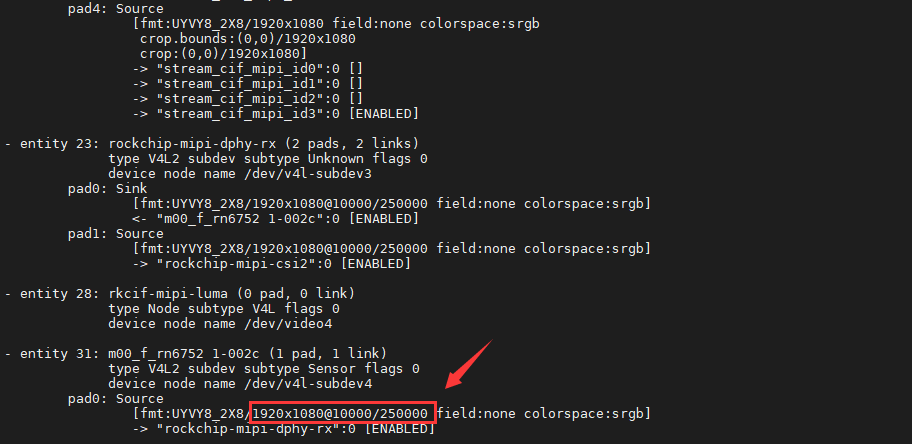
Media 帧大小
Media 帧大小是在驱动初始化时,通过 rn6752_get_fmt 函数获取的,程序如下static int rn6752_get_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct i2c_client *client = v4l2_get_subdevdata(sd); /* 获取i2c_client指针 */
struct rn6752 *rn6752 = to_rn6752(sd); /* 使用dev_dbg打印日志,显示当前函数进入 */
// dev_info(&client->dev, "%s enter\n", __func__); /* 条件成立时,表示要获取正在尝试的格式 */
if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
struct v4l2_mbus_framefmt *mf; /* 获取正在尝试的格式 */
mf = v4l2_subdev_get_try_format(sd, cfg, 0);
mutex_lock(&rn6752->lock);
fmt->format = *mf;
mutex_unlock(&rn6752->lock);
return 0;
#else
return -ENOTTY;
#endif
} /* 条件不成立时,表示要获取当前的格式 */
mutex_lock(&rn6752->lock);
fmt->format = rn6752->format;
mutex_unlock(&rn6752->lock); /* 使用dev_dbg打印日志,显示当前格式的代码值、宽度和高度 */
dev_dbg(&client->dev, "%s: %x %dx%d\n", __func__, rn6752->format.code,
rn6752->format.width, rn6752->format.height); return 0;
}
帧格式判断
Media 设备是通过 rn6752_enum_frame_sizes 和 rn6752_enum_frame_interval 函数枚举了帧大小和帧率,这两个函数主要起到判断的作用,确实当前帧率是否是驱动支持的,程序如下static int rn6752_enum_frame_sizes(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_size_enum *fse)
{
struct rn6752 *rn6752 = to_rn6752(sd);
struct i2c_client *client = v4l2_get_subdevdata(sd);
int i = ARRAY_SIZE(rn6752_formats);
printk(KERN_INFO
"rn6752_enum_frame_sizes................................................\n"); dev_dbg(&client->dev, "%s:\n", __func__); if (fse->index >= rn6752->cfg_num)
return -EINVAL; while (--i)
if (fse->code == rn6752_formats[i].code)
break; fse->code = rn6752_formats[i].code; fse->min_width = rn6752->framesize_cfg[fse->index].width;
fse->max_width = fse->min_width;
fse->max_height = rn6752->framesize_cfg[fse->index].height;
fse->min_height = fse->max_height;
return 0;
} static int rn6752_enum_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_interval_enum *fie)
{
struct rn6752 *rn6752 = to_rn6752(sd);
printk(KERN_INFO
"rn6752_enum_frame_interval index: %d....................\n", fie->index ); /* 检查传入的 fie 结构体中的 index 字段是否超出了 rn6752 所支持的帧间隔配置数量(cfg_num) */
if (fie->index >= rn6752->cfg_num)
return -EINVAL; /* 检查传入的 fie 结构体中的 code 字段是否与期望的媒体总线格式(MEDIA_BUS_FMT_UYVY8_2X8)匹配 */
if (fie->code != MEDIA_BUS_FMT_UYVY8_2X8)
return -EINVAL; fie->width = rn6752->framesize_cfg[fie->index].width; /* 宽 */
fie->height = rn6752->framesize_cfg[fie->index].height; /* 高 */
fie->interval = rn6752->framesize_cfg[fie->index].max_fps; /* 最大帧率 */ return 0;
}
帧大小设置
可以通过 rn6752_set_fmt 函数设置帧的大小,程序如下tatic int rn6752_set_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct i2c_client *client = v4l2_get_subdevdata(sd);
int index = ARRAY_SIZE(rn6752_formats);
struct v4l2_mbus_framefmt *mf = &fmt->format;
const struct rn6752_framesize *size = NULL;
struct rn6752 *rn6752 = to_rn6752(sd);
printk(KERN_INFO
"rn6752_set_fmt................................................\n"); dev_info(&client->dev, "%s enter\n", __func__); /* 根据传入的参数调整帧大小和帧速率,并返回适合的帧大小和帧速率 */
__rn6752_try_frame_size_fps(rn6752, mf, &size, rn6752->fps); /* 遍历rn6752_formats数组 */
while (--index >= 0)
if (rn6752_formats[index].code == mf->code)
break; if (index < 0)
return -EINVAL; /* 色彩空间为sRGB,场为无 */
mf->colorspace = V4L2_COLORSPACE_SRGB;
mf->code = rn6752_formats[index].code;
mf->field = V4L2_FIELD_NONE; mutex_lock(&rn6752->lock); if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
mf = v4l2_subdev_get_try_format(
sd, cfg,
fmt->pad); /* 使用v4l2_subdev_get_try_format函数获取正在尝试的格式 */
*mf = fmt->format;
#else
return -ENOTTY;
#endif
} else {
if (rn6752->streaming) {
mutex_unlock(&rn6752->lock);
return -EBUSY;
} /* 分别设置为获取到的帧大小和传入的格式 */
rn6752->frame_size = size;
rn6752->format = fmt->format;
} mutex_unlock(&rn6752->lock); return 0;
}
帧间隔获取
static int rn6752_g_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_frame_interval *fi)
{
struct rn6752 *rn6752 = to_rn6752(sd);
printk(KERN_INFO
"rn6752_g_frame_interval................................................\n"); mutex_lock(&rn6752->lock);
fi->interval = rn6752->frame_size->max_fps;
mutex_unlock(&rn6752->lock);
return 0;
}
四、总线编码格式
之前有提到过,RN6752 支持 DVP 和 MIPI 总线格式,所以可以在一个驱动中实现两个功能,这里我就是写了 MIPI 的通信方式,我目前对 DVP 也不了解,以后在补上。
刚好驱动中提供了两个函数可以获取驱动总线的格式,如下所示
获取当前媒体总线配置的函数
static int rn6752_g_mbus_config(struct v4l2_subdev *sd,
struct v4l2_mbus_config *config)
{
printk(KERN_INFO
"rn6752_g_mbus_config................................................\n"); /* 总线类型是CSI-2 */
config->type = V4L2_MBUS_CSI2;
config->flags = V4L2_MBUS_CSI2_4_LANE | V4L2_MBUS_CSI2_CHANNEL_0 |
V4L2_MBUS_CSI2_CHANNEL_1 |
V4L2_MBUS_CSI2_CONTINUOUS_CLOCK; return 0;
}枚举所有支持的媒体总线编码和格式
static int rn6752_enum_mbus_code(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_mbus_code_enum *code)
{
struct i2c_client *client = v4l2_get_subdevdata(sd);
printk(KERN_INFO
"rn6752_enum_mbus_code................................................\n"); dev_dbg(&client->dev, "%s:\n", __func__); if (code->index >= ARRAY_SIZE(rn6752_formats))
return -EINVAL; code->code = rn6752_formats[code->index].code;
return 0;
}
五、电源管理
摄像头每次开启和关闭时,都需要通过电源管理函数配置摄像头电源
static int rn6752_power(struct v4l2_subdev *sd, int on)
{
struct rn6752 *rn6752 = to_rn6752(sd);
struct i2c_client *client = rn6752->client;
int ret = 0;
/* 使用dev_info打印日志,显示当前函数和行号,并打印on参数的值 */
dev_dbg(&client->dev, "%s(%d) on(%d)\n", __func__, __LINE__, on);
mutex_lock(&rn6752->lock);
if (rn6752->power_on == !! on)
goto unlock_and_return;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0) {
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
rn6752->power_on = true;
} else {
pm_runtime_put(&client->dev);
rn6752->power_on = false;
}
unlock_and_return:
mutex_unlock(&rn6752->lock);
return ret;
}
六、摄像头控制
由于这里我没有实现太多的控制功能,所以只实现了必要的两个控制,最主要的是复位时执行的 RKMODULE_SET_QUICK_STREAM 功能
static long rn6752_ioctl(struct v4l2_subdev *sd, unsigned int cmd, void *arg)
{
struct rn6752 *rn6752 = to_rn6752(sd);
// struct rkmodule_hdr_cfg *hdr;
long ret = 0;
u32 stream = 0;
// dev_dbg(KERN_INFO "rn6752_ioctl 0x%x..........\n", cmd);
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
rn6752_get_module_info(rn6752, (struct rkmodule_inf *)arg);
break;
case RKMODULE_SET_QUICK_STREAM:
stream = *((u32 *)arg);
rn6752_set_streaming(rn6752, !!stream);
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return ret;
}
#ifdef CONFIG_COMPAT
static long rn6752_compat_ioctl32(struct v4l2_subdev *sd, unsigned int cmd,
unsigned long arg)
{
void __user *up = compat_ptr(arg);
struct rkmodule_inf *inf;
struct rkmodule_awb_cfg *cfg;
long ret;
u32 stream = 0;
// dev_dbg(KERN_INFO "rn6752_compat_ioctl32..........\n");
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
inf = kzalloc(sizeof(*inf), GFP_KERNEL);
if (!inf) {
ret = -ENOMEM;
return ret;
}
ret = rn6752_ioctl(sd, cmd, inf);
if (!ret)
ret = copy_to_user(up, inf, sizeof(*inf));
kfree(inf);
break;
case RKMODULE_AWB_CFG:
cfg = kzalloc(sizeof(*cfg), GFP_KERNEL);
if (!cfg) {
ret = -ENOMEM;
return ret;
}
ret = copy_from_user(cfg, up, sizeof(*cfg));
if (!ret)
ret = rn6752_ioctl(sd, cmd, cfg);
kfree(cfg);
break;
case RKMODULE_SET_QUICK_STREAM:
ret = copy_from_user(&stream, up, sizeof(u32));
if (!ret)
ret = rn6752_ioctl(sd, cmd, &stream);
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return 0;
}
#endif
七、数据流控制
整个驱动最重要的便是流控制函数,通过此函数完成了摄像头的启动和停止
static int rn6752_set_streaming(struct rn6752 *rn6752, int on)
{
struct i2c_client *client = rn6752->client;
int ret = 0;
dev_info(&client->dev, "%s: on: %d\n", __func__, on);
if (on)
{
ret = rn6752_write(client, 0x80, 0x31);
usleep_range(200, 500);
ret |= rn6752_write(client, 0x80, 0x30);
if (ret)
{
dev_err(&client->dev, "rn6752 soft reset failed\n");
return ret;
}
ret = rn6752_write_array(client, rn6752->frame_size->regs);
if (ret)
dev_err(&client->dev, "rn6752 start initialization failed\n");
}
else
{
ret = rn6752_write(client, 0x80, 0x00);
if (ret)
dev_err(&client->dev, "rn6752 soft standby failed\n");
}
return ret;
}
static int rn6752_s_stream(struct v4l2_subdev *sd, int on)
{
struct i2c_client *client = v4l2_get_subdevdata(sd);
struct rn6752 *rn6752 = to_rn6752(sd);
int ret = 0;
unsigned int fps;
/* 计算帧率和延迟时间 */
fps = DIV_ROUND_CLOSEST(rn6752->frame_size->max_fps.denominator,
rn6752->frame_size->max_fps.numerator);
dev_info(&client->dev, "%s: on: %d, %dx%d@%d\n", __func__, on,
rn6752->frame_size->width, rn6752->frame_size->height,
DIV_ROUND_CLOSEST(rn6752->frame_size->max_fps.denominator,
rn6752->frame_size->max_fps.numerator));
mutex_lock(&rn6752->lock);
on = !!on;
if (rn6752->streaming == on)
goto unlock;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0)
{
pm_runtime_put_noidle(&client->dev);
goto unlock;
}
}
rn6752->streaming = on;
ret = rn6752_set_streaming(rn6752, on);
if (ret)
rn6752->streaming = !on;
pm_runtime_put(&client->dev);
unlock:
mutex_unlock(&rn6752->lock);
return ret;
}
注意: 摄像头驱动中并没有图像接收之类的关系,而数据流操作函数主要的作用是对芯片进行初始化,使摄像头进入工作模式。从上面的驱动程序可以看出,整个驱动并没有其他特别的功能,就是一个 I2C 控制功能,所以摄像头的驱动其实就是一个 I2C 驱动程序。
由于笔记内容有点多,这里我就不附上完成的驱动程序了,其次是驱动程序也比较简单,看完的小伙伴应该都能明白。主要的难度都在调试摄像头驱动上面,我也折腾了很久,有需要的小伙变可以看我后面的笔记
参考资料
gc2145.c 和 imx335.c 驱动程序
Linux RN6752 驱动编写的更多相关文章
- linux设备驱动编写入门
linux设备驱动是什么,我个人的理解是liunx有用户态和内核态,用户空间中是不能直接对设备的外设进行使用而内核态中却可以,这时我们需要在内核空间中将需要的外设驱动起来供用户空间使用.linux的驱 ...
- linux设备驱动编写_tasklet机制
在编写设备驱动时, tasklet 机制是一种比较常见的机制,通常用于减少中断处理的时间,将本应该是在中断服务程序中完成的任务转化成软中断完成. 为了最大程度的避免中断处理时间过长而导致中断丢失,有时 ...
- linux设备驱动编写_tasklet机制(转)
在编写设备驱动时, tasklet 机制是一种比较常见的机制,通常用于减少中断处理的时间,将本应该是在中断服务程序中完成的任务转化成软中断完成. 为了最大程度的避免中断处理时间过长而导致中断丢失,有时 ...
- v4l2驱动编写篇【转】
转自:http://blog.csdn.net/michaelcao1980/article/details/53008418 大部分所需的信息都在这里.作为一个驱动作者,当挖掘头文件的时候,你可能也 ...
- Linux驱动之按键驱动编写(中断方式)
在Linux驱动之按键驱动编写(查询方式)已经写了一个查询方式的按键驱动,但是查询方式太占用CPU,接下来利用中断方式编写一个驱动程序,使得CPU占有率降低,在按键空闲时调用read系统调用的进程可以 ...
- linux驱动编写之中断处理
一.中断 1.概念 学过单片机的应该非常清楚中断的概念,也就是CPU在正常执行程序过程中,出现了突发事件(中断事件),于是CPU暂停当前程序的执行,转去处理突发事件.处理完毕后,CPU又返回被中断的程 ...
- Linux驱动之按键驱动编写(查询方式)
在Linux驱动之LED驱动编写已经详细介绍了一个驱动的编写过程,接着来写一个按键驱动程序,主要是在file_operations结构中添加了一个read函数.还是分以下几步说明 1.查看原理图,确定 ...
- Linux驱动:I2C驱动编写要点
继续上一篇博文没讲完的内容“针对 RepStart 型i2c设备的驱动模型”,其中涉及的内容有:i2c_client 的注册.i2c_driver 的注册.驱动程序的编写. 一.i2c 设备的注册分析 ...
- Linux驱动:SPI驱动编写要点
题外话:面对成功和失败,一个人有没有“冠军之心”,直接影响他的表现. 几周前剖析了Linux SPI 驱动框架,算是明白个所以然,对于这么一个庞大的框架,并不是每一行代码都要自己去敲,因为前人已经把这 ...
- ARM Linux驱动篇 学习温度传感器ds18b20的驱动编写过程
ARM Linux驱动篇 学习温度传感器ds18b20的驱动编写过程 原文地址:http://www.cnblogs.com/NickQ/p/9026545.html 一.开发板与ds18b20的入门 ...
随机推荐
- maxwell数据抓取工具
前言 maxwell是一款开源MySQL数据抓取工具,可以读取MySQL的binlog,然后转换成json并输出到kafka.redis等消息队列中. bin/maxwell,用于增量抓取 bin/m ...
- 你能看到这个汉字么“ ” ?关于Unicode的私人使用区(PUA) 和浏览器端显示处理
如果你现在使用的是chrome查看那么你是看不到我标题中的汉字的,显示为一个小方框,但是你使用edge查看的话,这个字就能正常的显示出来,不信你试试! 本故事源于我在做数据过程中遇到Unicode编码 ...
- QEMU tap数据接收流程
QEMU直接从tap/tun取数据 QEMU tap数据接收步骤: qemu从tun取数据包 qemu将数据包放入virtio硬件网卡. qemu触发中断. 虚拟机收到中断,从virtio读取数据. ...
- KRPANO资源分析工具下载四方环视全景图
提示:目前分析工具中的全景图下载功能将被极速全景图下载大师替代,相比分析工具,极速全景图下载大师支持更多的网站(包括各类KRPano全景网站,和百度街景) 详细可以查看如下的链接: 极速全景图下载大师 ...
- 使用JAVA调用KRPANO加密XML
KRPano自带的命令行工具krpanotools可以加密XML,具体的参数说明如下语法: krpanotools32.exe encrypt [OPTIONS] inputfiles input ...
- mpi转以太网连接300PLC实现以太网通信配置方法
西门子S7300PLC连接MPI-ETH-XD1.0实现以太网通信配置方法 产品简介 兴达易控MPI-ETH-XD1.0用于西门子S7-200/SMART S7-200/S7-300/S7-400/西 ...
- heygen模型接口 简单使用 java版
HeyGen - AI Spokesperson Video Creator 官网地址 Create a video (heygen.com) api地址 简介: 公司最近对ai方面业务比较感兴趣了 ...
- 10 Myths About Introverts
By Carl King [ Translations: Spanish| German | Dutch | Italian | Portuguese ] I wrote this list in l ...
- Nginx-自动漂移VIP
自动漂移VIP-1 #!/bin/bash #2020-03-16 14:24 #auto change nginx vip.sh #By Precious ##################### ...
- .net core中你的MD5用对了吗?
本文的项目环境为 .net 6.0 (.net 5.0 以上都支持) 在 .net 中获取字符串的 MD5 相信是非常容易的事情吧, 但是随便在网上搜一搜发现流传的版本还不少呢,比如: StringB ...