自适应滤波:维纳滤波器——LCMV及MVDR实现
作者:桂。
时间:2017-03-24 06:52:36
链接:http://www.cnblogs.com/xingshansi/p/6609317.html
声明:欢迎被转载,不过记得注明出处哦~
【读书笔记03】
前言
西蒙.赫金的《自适应滤波器原理》第四版,上一篇看到维纳滤波基本形式:最优化问题,且无任何条件约束。这次看到有约束的部分,简单整理一下思路:
1)拉格朗日乘子法;
2)线性约束最小方差滤波器(Linearly constrained minimum-variance,LCMV);
3)谱估计之MVDR算法(Minimum variance distortionless response ,MVDR);
内容为自己的学习总结,如有错误之处,还请各位帮忙指出!
一、拉格朗日乘子法
学习到含有约束条件的Wiener Filter,拉格朗日乘子法是解决:将含约束条件的优化问题转化为无约束条件优化问题的途径,故先梳理一下。
A-只含一个等式约束的最优化
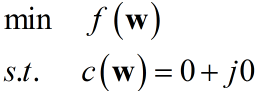
实函数$f\left( {\bf{w}} \right)$是参数向量${\bf{w}}$的二次函数,约束条件是:
${{{\bf{w}}^H}{\bf{s}} = g}$
其中$\bf{s}$是已知向量,$g$是复常数。例如在波束形成应用中${\bf{w}}$表示各传感器输出的一组复数权值,$\bf{s}$是一个旋转向量。假设该问题是一个最小化问题,令$c\left( {\bf{w}} \right) = {{\bf{w}}^H}{\bf{s}} - g = 0 + j0$可以描述为:
所谓拉格朗日乘子法,就是引入拉格朗日乘子:将上述约束最小化问题转化为无约束问题,定义一个新的实函数:
$h\left( {\bf{w}} \right) = f\left( {\bf{w}} \right) + {\lambda _1}{\mathop{\rm Re}\nolimits} \left[ {c\left( {\bf{w}} \right)} \right] + {\lambda _2}{\mathop{\rm Im}\nolimits} \left[ {c\left( {\bf{w}} \right)} \right]$
现在定义一个复拉格朗日乘子:
$\lambda = {\lambda _1} + {\lambda _2}$
$h({\bf{w}})$改写为:
$h\left( {\bf{w}} \right) = f\left( {\bf{w}} \right) + {\mathop{\rm Re}\nolimits} \left[ {{\lambda ^*}c\left( {\bf{w}} \right)} \right]$
至此,无约束优化问题转化完成,利用偏导求参即可,其实这是一个简化的形式,分别求解$\lambda _1$、$\lambda _2$也是一样的。
B-包含多个等式约束的最优化
实函数$f\left( {\bf{w}} \right)$是参数向量${\bf{w}}$的二次函数,约束条件是:
${{{\bf{w}}^H}{\bf{s_k}} = g_k}$
其中$k = 1,2...K$,方法同单个约束情况相同,求解伴随方程:
$\frac{{\partial f}}{{\partial {{\bf{w}}^*}}} + \sum\limits_{k = 1}^K {\frac{\partial }{{\partial {{\bf{w}}^*}}}\left( {{\mathop{\rm Re}\nolimits} \left[ {\lambda _k^*{c_k}\left( {\bf{w}} \right)} \right]} \right)} = {\bf{0}}$
此时与多个等式约束联合成方程组,这个方程组定义了${\bf{w}}$和拉格朗日乘子${\lambda _1}$、${\lambda _2}$...${\lambda _K}$的解。
二、线性约束最小方差滤波器
之前看到的维纳滤波都是基于最小均方误差准则,而没有添加任何约束,此处考虑含有线性约束情况下的方差滤波器,文中给了一个图:
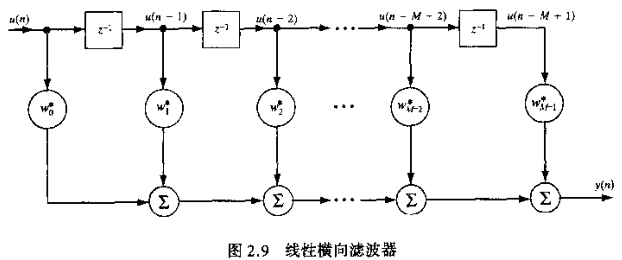
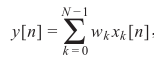
其中$x(n)$为输入信号(即$u$,为了与下文统一,用$x$表示),$w_i$为权重,$y(n)$为滤波器输出:
$y\left( n \right) = \sum\limits_{k = 0}^{M - 1} {{w^*_k}x\left( {n - k} \right)} $
这个优化问题如果没有约束可以表述为:
$\arg \mathop {\min }\limits_{\bf{w}} J = E\left[ {{y^H}y} \right]$
假设$\theta_0$为目标达到角,希望对该角度特殊处理:如果该角是目标角,希望其幅度保持不衰减,即$\sum\limits_{k = 0}^{M - 1} {{w^*_k}{e^{ - jk{\theta _0}}}} = 1$;反之,如果是干扰信号,希望其幅度衰减为0,即$\sum\limits_{k = 0}^{M - 1} {{w^*_k}{e^{ - jk{\theta _0}}}} = 0$;无论是0还是1,都是对优化问题的一种约束形式,写出更一般的约束形式:
$\sum\limits_{k = 0}^{M - 1} {{w^*_k}{e^{ - jk{\theta _0}}}} = g$
$g$是一个复增益。利用拉格朗日乘子法给出约束条件下准则函数(暂不考虑噪声情况):
$J = {{\bf{w}}^H}{R_{xx}}{\bf{w}} + {\mathop{\rm Re}\nolimits} \left[ {{\lambda ^*}\left[ {{{\bf{w}}^H}{\bf{s}}\left( {{\theta _0}} \right) - g} \right]} \right]$
其中${\bf{s}}\left( {{\theta _0}} \right) = \left[ {1,{e^{ - j{\theta _0}}},...,{e^{ - j(M - 1){\theta _0}}}} \right]$,$M$是权向量$\bf{w}$的个数,则到系数解:
$\lambda = - \frac{{2g}}{{{{\bf{s}}^H}\left( {{\theta _0}} \right){{\bf{R}}^{ - 1}}{\bf{s}}\left( {{\theta _0}} \right)}}$
对应最优权向量:
${{\bf{w}}_{opt}} = \frac{{{g^*}{{\bf{R}}^{ - 1}}{\bf{s}}\left( {{\theta _0}} \right)}}{{{{\bf{s}}^H}\left( {{\theta _0}} \right){{\bf{R}}^{ - 1}}{\bf{s}}\left( {{\theta _0}} \right)}}$
以权向量${{\bf{w}}_{opt}}$表征的波束形成器称为线性约束最小方差(LCMV, linearly constrained minimum-variance)波束形成器,也称LCMV滤波器。
三、LCMV应用——MVDR算法
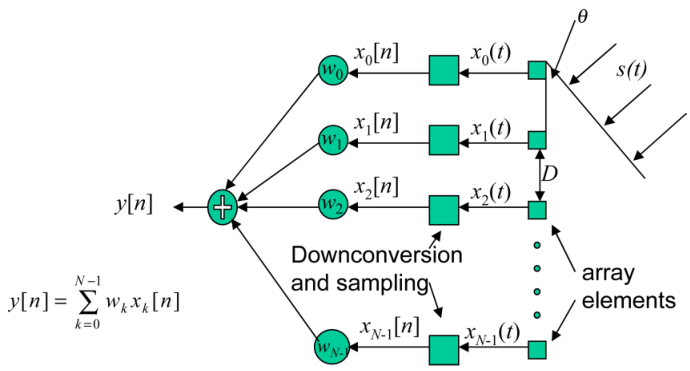
实际应用中信号掺杂了噪声。假设原信号$s(t)$,接收器收集的是不同时延的混合信号,经过采样量化后得$x(n)$,现在希望通过自适应权重$w$输出符合需求的$y$,假设通道个数为$N$,给出接收通道模型:
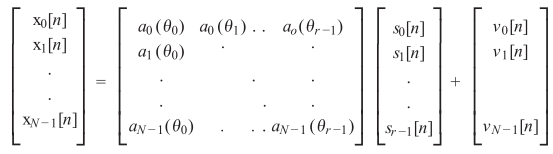
写成矩阵形式:

进行相关矩阵求解:

可以发现如果$w^Hw$为定值,则噪声对最优权值的求解无影响,LCMV可用。
给出混合模型:
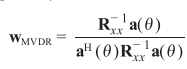
对应准则函数(此处$g = 1$):

借助LCMV的分析,得出MVDR最优权重:
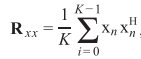
实际应用中,通常用时间换空间,借助遍历性近似求解相关矩阵:
给出代码:
doas=[-30 -5 40]*pi/180; %DOA's of signals in rad.
P=[1 1 1]; %Power of incoming signals
N=10; %Number of array elements
K=1024; %Number of data snapshots
d=0.5; %Distance between elements in wavelengths
noise_var=40; %Variance of noise
r=length(doas); %Total number of signals
% Steering vector matrix. Columns will contain the steering vectors of the r signals
A=exp(-i*2*pi*d*(0:N-1)'*sin([doas(:).']));
% Signal and noise generation
sig=round(rand(r,K))*2-1; % Generate random BPSK symbols for each of the
% r signals
noise=sqrt(noise_var/2)*(randn(N,K)+i*randn(N,K)); %Uncorrelated noise
X=A*diag(sqrt(P))*sig+noise; %Generate data matrix
R=X*X'/K; %Spatial covariance matrix
%MVDR
IR=inv(R); %Inverse of covariance matrix
for k=1:length(angles)
mvdr(k)=1/(a1(:,k)'*IR*a1(:,k));
end
figure;
plot(angles,abs(mvdr)/max(abs(mvdr)),'k');hold on;
xlabel('Angle in degrees')
%Estimate DOA's using the classical beamformer
for k=1:length(angles)
Classical(k)=(a1(:,k)'*R*a1(:,k));
end
plot(angles,abs(Classical)/max(abs(Classical)),'r--');grid on;
legend('MVDR','Classical Beamformer');
对应结果图:
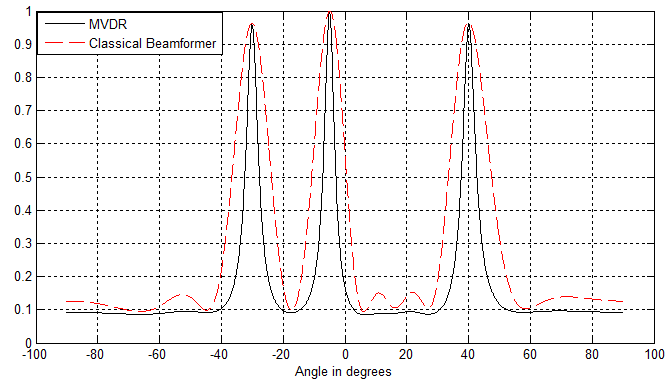
噪声较大时:

二者就比较接近,可以发现:
- 信号与噪声不相关、且噪声为白噪声时,仍能求解最优权值;
- 噪声较大时,MVDR与无约束最优滤波效果接近,此时MVDR的优势不再明显,这也容易理解,噪声占主要成分时对波束的约束保留效果不再明显。
两点补充:
1)因为LCMV中有矩阵求逆一项,所以补充说明一点:默认不同角度信号不相干,只记录学习的理论知识,不论及技术细节处。
2)基于窄带分析。如果是宽带,则可以划分多个自带,或者利用聚焦矩阵预处理,窄带才有如下近似(且一个频带内才可以用一个频率表征):
参考:
Jeffrey Foutz, Andreas Spanias, and Mahesh K. Banavar《Narrowband Direction of Arrival Estimation for Antenna Arrays》.
Simon Haykin 《Adaptive Filter Theory Fourth Edition》.
自适应滤波:维纳滤波器——LCMV及MVDR实现的更多相关文章
- 自适应滤波:维纳滤波器——FIR及IIR设计
作者:桂. 时间:2017-03-23 06:28:45 链接:http://www.cnblogs.com/xingshansi/p/6603263.html [读书笔记02] 前言 仍然是西蒙. ...
- 自适应滤波:最小均方误差滤波器(LMS、NLMS)
作者:桂. 时间:2017-04-02 08:08:31 链接:http://www.cnblogs.com/xingshansi/p/6658203.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 自适应滤波:维纳滤波器——GSC算法及语音增强
作者:桂. 时间:2017-03-26 06:06:44 链接:http://www.cnblogs.com/xingshansi/p/6621185.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 自适应滤波——线性预测(LPC)
作者:桂. 时间:2017-03-26 10:12:07 链接:http://www.cnblogs.com/xingshansi/p/6621914.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 自适应滤波原理及simulink
- 自适应滤波:奇异值分解SVD
作者:桂. 时间:2017-04-03 19:41:26 链接:http://www.cnblogs.com/xingshansi/p/6661230.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 【自适应波束形成】MVDR(Minimum Variance Distortionless Response )笔记
参考: https://blog.csdn.net/qq_40981790/article/details/80143524 1. MVDR简介(Minimum Variance Distortion ...
- 七中滤波方法测试matlab实现
http://blog.163.com/xiaheng0804@126/blog/static/1205282120132129471816/ 创建两个混合信号,便于更好测试滤波器效果.同时用七中滤波 ...
- 自适应滤波器(Adaptive Filter)
======= Wikipedia的解释 ======= 自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器.作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函 ...
随机推荐
- 用 bottle.py 写了个简单的升级包上传
可以当作一个 demo 来玩吧,在这里分享一下.里面涉及的内容包含了文件上传,cookie 设置和读取,重定向(redirect). from bottle import run, post, get ...
- ES6学习笔记七:生成器与异步操作
一:Generator Generator 函数是一个普通函数,但是有两个特征.一是,function关键字与函数名之间有一个星号:二是,函数体内部使用yield表达式,输出不同的内部状态. 执行 G ...
- JSTL学习笔记
转载请注明原文地址:http://www.cnblogs.com/ygj0930/p/6684442.html 一:JSTL用途 JSP标准标签库(JSTL)是一个JSP标签集合,它封装了JSP应用 ...
- Linux安装nginx并设置https(openssl
一.安装依赖包 1.$sudo apt-get install openssl 或者$sudo apt-get install libssl-dev 2.$sudo apt-get instal ...
- Java远程方法协议(JRMP)
Java远程方法协议(英语:Java Remote Method Protocol,JRMP)是特定于Java技术的.用于查找和引用远程对象的协议.这是运行在Java远程方法调用(RMI)之下.TCP ...
- POJ 2003 Hire and Fire (多重链表 树结构 好题)
Hire and Fire Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 2316 Accepted: 655 Desc ...
- 小贝_mysql 触发器使用
触发器 简要 1.触发器基本概念 2.触发器语法及实战样例 3.before和after差别 一.触发器基本概念 1.一触即发 2.作用: 监视某种情况并触发某种操作 3.观察场景 一个电子商城: 商 ...
- SpringBoot与Dubbo整合的三种方式
1. 使用默认application.properties和注解的方式 导入dubbo-starter,在application.properties配置属性,使用@Service注解来暴露服务,使用 ...
- centos7用xshell可以连接, xftp连接失败!(墙裂推荐)
环境: vultr vps搭建的是centos7 毛病: xshell可以连接, 打开xftp配置好连接却连接失败如下图: 然后开始设置ssh的配置文件vim /etc/ssh/sshd_confi ...
- Android轻量级ORM框架ActiveAndroid入门教程(转)
注:没有找到出处,如有侵犯,请告知 开始ActiveAndroid神奇之旅: 在AndroidManifest.xml中我们需要添加这两个 AA_DB_NAME (数据库名称,这个name不能改,但是 ...