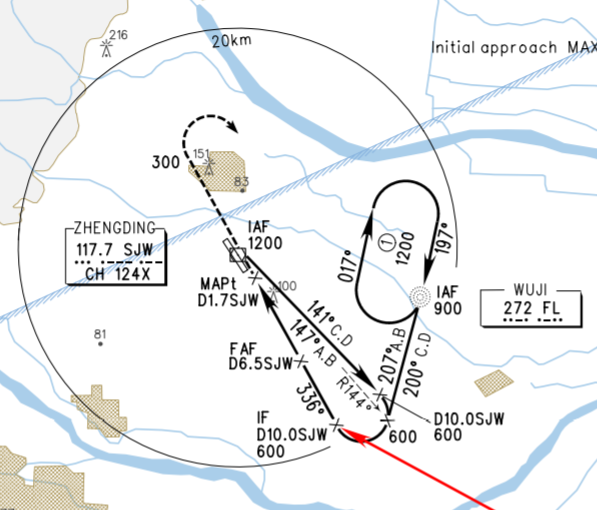
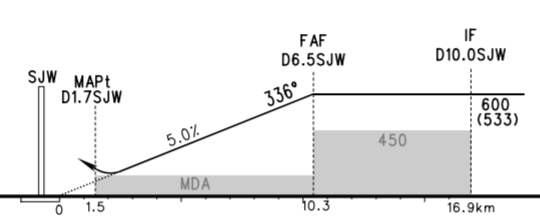
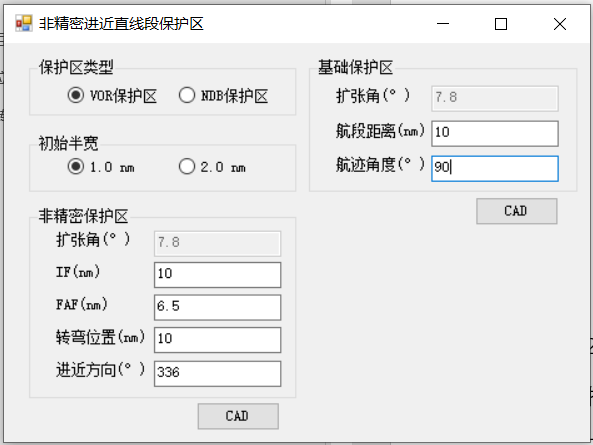
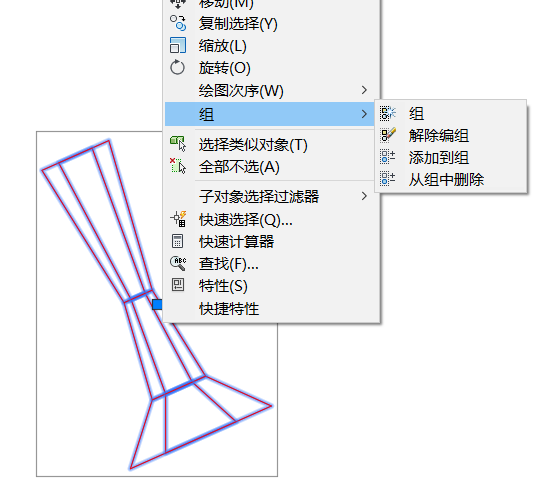
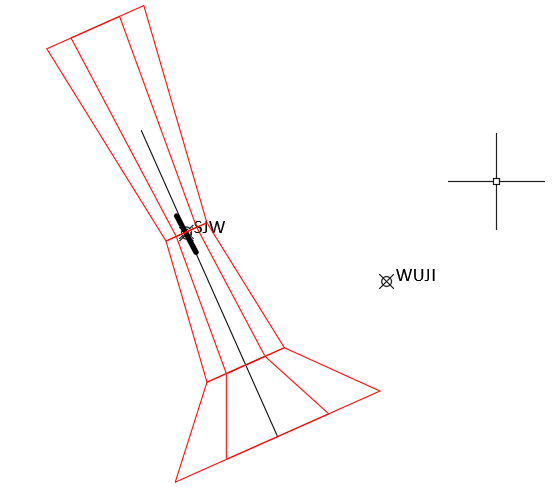
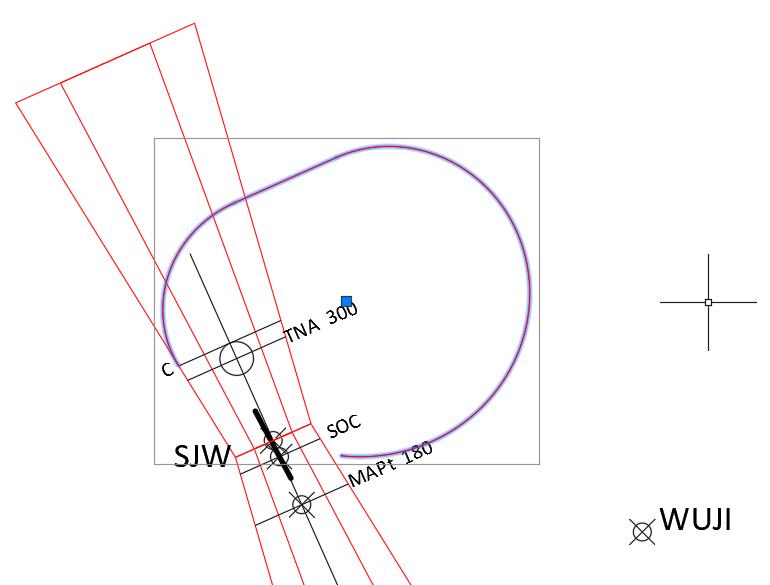
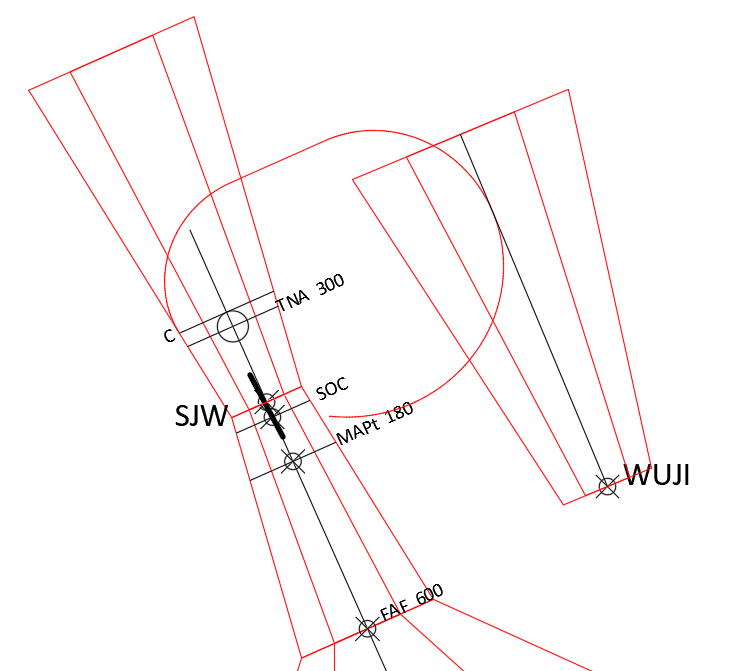
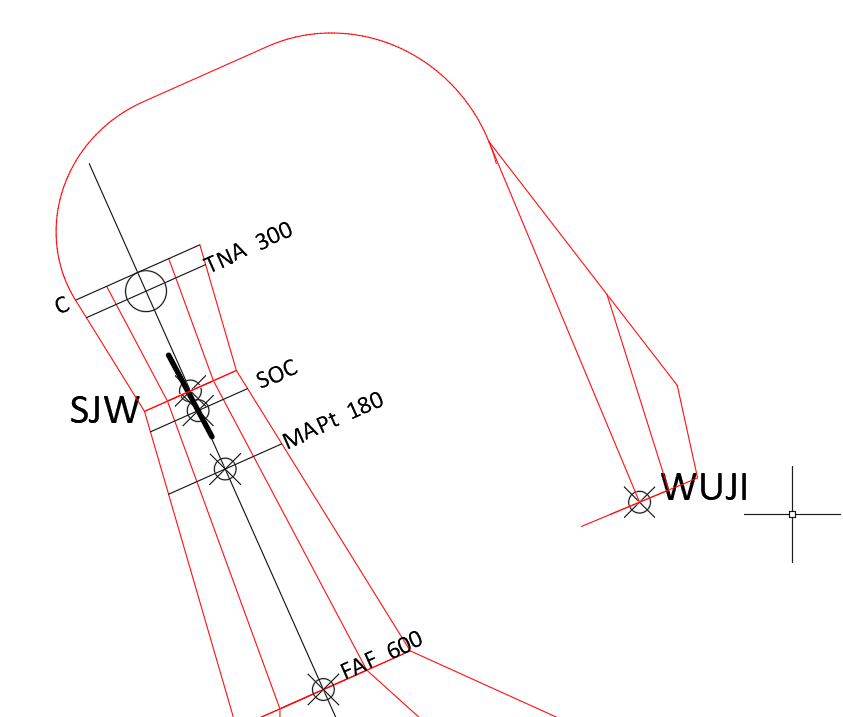
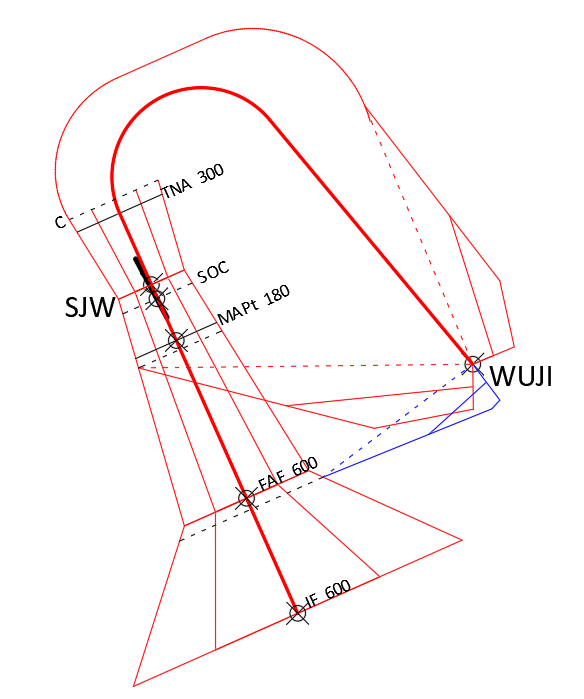
VOR/DME程序进近、复飞保护区的绘制

VOR/DME程序进近、复飞保护区的绘制的更多相关文章
- NDB程序进近复飞保护区的绘制
终于有点空闲,找张图来演练一下<风螺旋标准模板>软件的用法. 某机场NDB进近程序剖面图如下图所示: 该机场采用了近台和远台的双台布局,近台和远台均为NDB与指点标的合装台,没有中间进近定 ...
- 精密进近OAS面的绘制与评估
一.定义:精密进近OAS面(Obstacle Assessment Surface 障碍物评价面)是在精密进近程序中,用来对障碍物进行评估,找出影响运行标准的控制障碍物的一种计算方法. 二.构成 OA ...
- 精密进近OCH的计算
一.计算步骤 以I类精密进近为例,运行标准的制定大致分为以下几个步骤: 1)确定精密航段的超高障碍物. 2)计算当量高 3)计算高度损失 4)当量高与高度损失相加得到超障高OCH 5)对复飞段障碍物进 ...
- 微信小程序语音与讯飞语音识别接口(Java)
项目需求,需要使用讯飞的语音识别接口,将微信小程序上传的录音文件识别成文字返回 而微信小程序上传的文件格式是silk的,而讯飞接口能识别wav 格式的文件,所以需要将小程序上传的silk文件转成wav ...
- 微信小程序语音与讯飞语音识别接口(Java),Kronopath/SILKCodec,ffmpeg处理silk,pcm,wav转换
项目需求,需要使用讯飞的语音识别接口,将微信小程序上传的录音文件识别成文字返回 首先去讯飞开放平台中申请开通语音识别功能 在这里面下载sdk,然后解压,注意appid与sdk是关联的,appid在初始 ...
- 微信小程序 自定义单选复选按钮组的实现(用于实现购物车产品列表功能)
(一)单选按钮组 模型图如下: index.js Page({ data: { parameter: [{ id: 1, name: '银色' }, { id: 2, name: '白色' },{ i ...
- 安装apk程序进android
package com.example.installmyapk; import java.io.File; import android.net.Uri; import android.os.Bun ...
- 微信小程序实战篇:基于wxcharts.js绘制移动报表
前言 微信小程序图表插件(wx-charts)是基于canvas绘制,体积小巧,支持图表类型饼图.线图.柱状图 .区域图等图表图形绘制,目前wx-charts是微信小程序图表插件中比较强大好使的一个. ...
- SAP成都研究院飞机哥:程序猿和飞机的不解之缘
今天的文章来自Jerry的老同事张航. 张航和Jerry一样于2007年毕业后加入SAP成都研究院工作至今.进入SAP后的第一个开发部门是SAP Business by Design Infrastr ...
随机推荐
- log工具类
package com.pt.platform.core.common; import java.text.SimpleDateFormat; import java.util.Date; impor ...
- Cisco的互联网络操作系统IOS和安全设备管理器SDM__散知识点1
1.启动路由器:当你初次启动一台Cisco路由器时,它将运行开机自检(POST)过程.如果通过了,它将从闪存中查找Cisco IOS,如果有IOS文件存在,则执行装载操作(闪存是一个可电子擦写.可编程 ...
- npm qs 模块(中文)
本文基本使用谷歌翻译加上自己的理解,权当加深记忆. npm 简介 qs 是一个增加了一些安全性的查询字符串解析和序列化字符串的库.主要维护者:Jordan Harband最初创建者和维护者:TJ Ho ...
- MySQL 中的自增主键
MySQL 的主键可以是自增的,那么如果在断电重启后新增的值还会延续断电前的自增值吗?自增值默认为1,那么可不可以改变呢?下面就说一下 MySQL 的自增值. 特点 保存策略 1.如果存储引擎是 My ...
- docker(4)解决pull镜像速度缓慢
前言 上一篇讲到pull 镜像,但是pull镜像的时候下拉的速度实在感人,有什么解决办法吗?我们只需将docker镜像源修改为国内的 将docker镜像源修改为国内的: 在 /etc/docker/d ...
- Jenkins(2)docker容器中安装python3
前言 使用docker安装jenkins环境,jenkins构建的workspace目录默认是在容器里面构建的,如果我们想执行python3的代码,需进容器内部安装python3的环境. 进jenki ...
- 2017-2018 ACM-ICPC Latin American Regional Programming Contest PART (11/13)
$$2017-2018\ ACM-ICPC\ Latin\ American\ Regional\ Programming\ Contest$$ \(A.Arranging\ tiles\) \(B. ...
- JavaScript——二
样式: 实验二. querySelectorAll()里面如果填id名称就直接写,如果要确定某个属性的值,就要用到[ ]来具体选择,其中写多个以空格隔开就表达第一个声明下的第二个标签内部的某个属性 这 ...
- Codeforces Round #654 (Div. 2) C. A Cookie for You (思维)
题意:有\(a\)个蛋糕,\(b\)个巧克力,第一类人有\(n\)个,总是吃多的东西(若\(a>b\),吃蛋糕,否则吃巧克力),第二类人有\(m\)个,总是吃少的,可以随便调整这两类人吃的顺序, ...
- Linux-用户/用户组身份提权
sudo 身份提权(更安全) su命令在切换用户身份时,如果每个普通用户都能拿到root用户的密码,当其中某个用户不小心泄漏了root的密码,那系统会变得非常不安全. 为了改进这个问题,从而产生了su ...