STM32 定时器详细篇(基于HAL库)
l 16位的向上、向下、向上/向下(中心对齐)计数模式,支持自动重装载
l 16位的预分频器
l 每个定时器都有多个独立通道,每个通道可用于
* 输入捕获
* 输出比较
* PWM输出
* 单脉冲模式
l 高级定时器还可以产生互补输出
l 可以产生中断/DMA请求:
* 更新事件:计数器向上/向下溢出,计数器初始化(通过软或者内部/外部触发)
* 触发事件:计数器启动,停止,初始化或者有内部/外部触发计数
* 输入捕获
* 输出比较
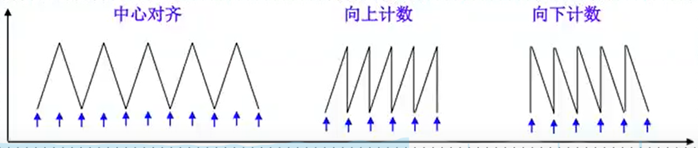
一、定时器之计数模式
(一) 计数模式
向上计数
计数器从0向上计数(递增)到自动装载值,然后再次回到0开始计数,并产生一个计数溢出事件
向下计数
计数器从自动装载值向下计数(递减)到0,然后再次回到自动装载值开始计数,并产生一个计数器向下溢出事件
中央对齐模式(向上/向下计数)
计数器从0开始计数到自动装载值-1,并产生一个计数器溢出事件,然后再向下计数到0+1,并产生一个计数溢出事件,然后再向上计数。
(二)定时器的溢出时间计算
time=(ARR+1)*(PSC+1)/Tclk
ARR为自动装载值
PSC:预分频系数
Tclk:定时器的APB时钟,通常等于系统时钟
如:
tclk为72M
psc为7199
arr为4999
time=(4999+1)*(7199+1)/72 000 000 = 0.5s = 500ms
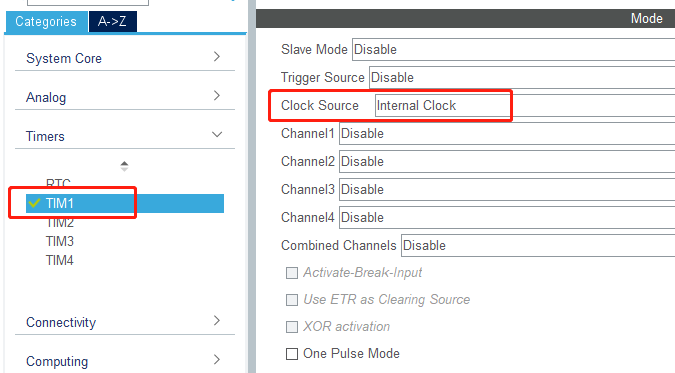
(三)CubeMX设置
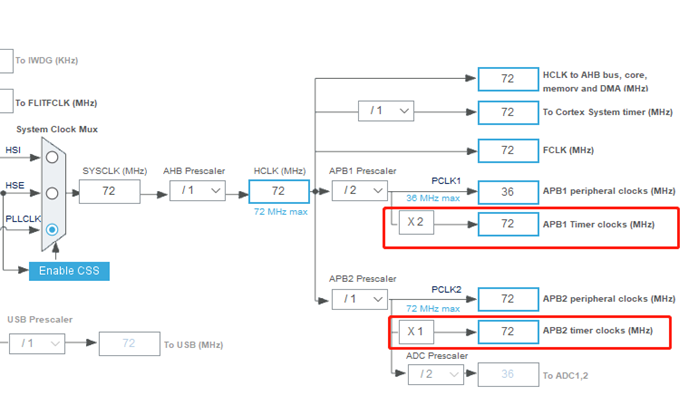
这里需要注意的是你所需要使用的定时器是挂载在APB1还是APB2。相应的要调节他们时钟频率
选择
选择内部时钟
基础配置,这里配置的是1秒计数
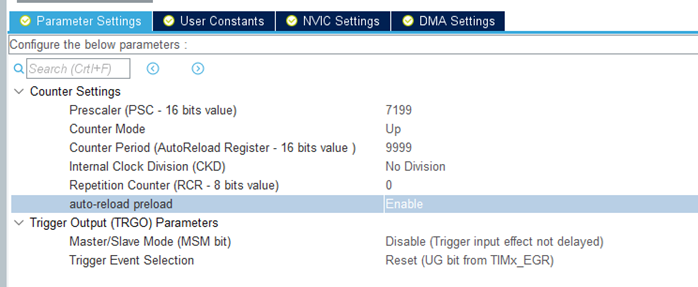
l Prescaler (PSC- 16 bits value),预分频器(PSC- 16位值)
l Counter Mode,计数器模式:
up 向上
down 向下
Center Aligned mode 中心对齐模式
l Counter Period (AutoReload Register - 16 bits value),重装载值
l auto-reload preload,自动重装载开启
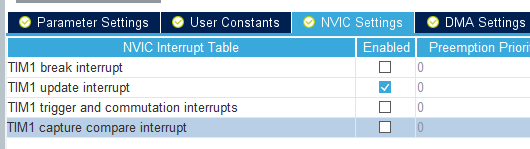
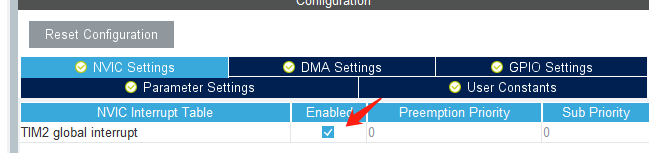
开启更新中断
中断优先级数字越低越高
(四)编程记录
中断开启
HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim)
溢出事件回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim->Instance == TIM1){
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//单独输出电平取反
}
}
开启中断
HAL_TIM_Base_Start_IT(&htim1);
二、 定时器之PWM
PWM即脉冲宽度调制,是一种模拟控制方式,通常用于LED的亮度调节。其实就是快速的高低电平变化让人感觉不出来。
(一)了解一下HZ的概念
1HZ表示1秒变化一个周期
在家用交流点中:
50HZ表示电流每秒钟来回变化50次,方向改变100次。
50HZ是50个周期,所以有50个正玄波形
这个图表示的是1HZ变化,1个周期,1个正玄波
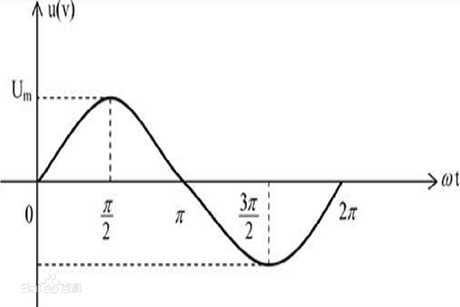
50HZ表示每个周期的时间=1S/50=0.02S=20ms
单片机检测交流电可以200ms内没有检测到高电平,则表示无输入。
在计算机cpu等使用1khz=1000hz
在电磁波和机械波等,1Khz=1024hz
在PWM中
hz是频率的单位
1hz 表示PWM的周期是一秒
1Khz表示一秒钟有一千个周期,也就是周期是1ms
1KKhz、1Mhz表示一秒钟有100万个周期,也就是周期是1us
y秒=1/xHZ
1/1000=0.001S=1ms
1/1000000=0.000001S=1us
如果实现周期是100us
100us=0.0001S=1/0.0001= 10,000HZ
(二)PWM配置

ARR为自动装载值
CCRx 为捕获比较寄存器值
预分频系数决定了PWM的时钟速度
ARR的大小决定了PWM的周期
CRRx决定了输出有效信号的时间
有效信号:
高电平
低电平
PWM模式:
模式1,不管是向上还是向下计数,当计数值小于重装载值是输出有效电平。
模式2,不管是向上还是向下计数,当计数值小于重装载值是输出无效电平。
PWM周期计算
Fpwm = 100M / ((arr+1)*(psc+1))(单位:Hz)
Fpwm = 100M / (arr+1)/(psc+1)(单位:Hz)
arr 是计数值
psc 是预分频值
如:
3. 主频=100M
4. arr=100
5. psc=1000
100,000,000/100/1000=1000Hz
(三) CubeMX设置
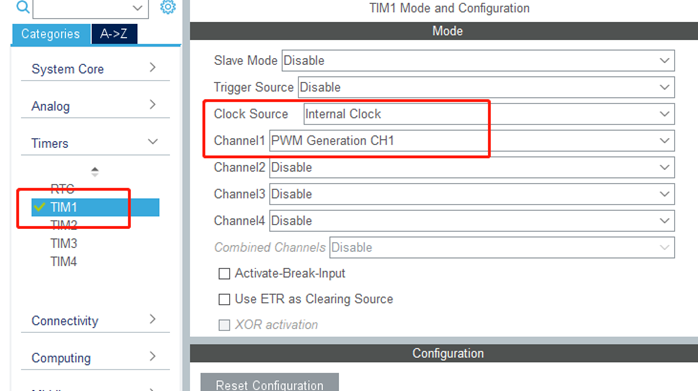
设置定时器使用内部时钟
设置定时器的PWM通道1开启
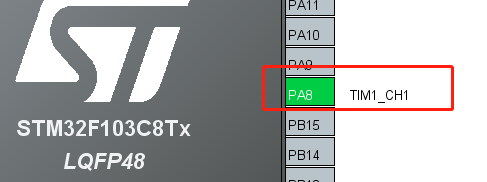
STM32F103C8T6对应的PWM通道为PA8
设置基础参数
Prescaler,分配系数为36
Counter Period,重装载值为100
所以:
PWM的频率为:72 000 000/35/100=20 000 HZ(20KHZ),周期为 1/20000= 0.00005秒
PWM脉宽调制的最大值与重装载值一致,其范围为[0,100]
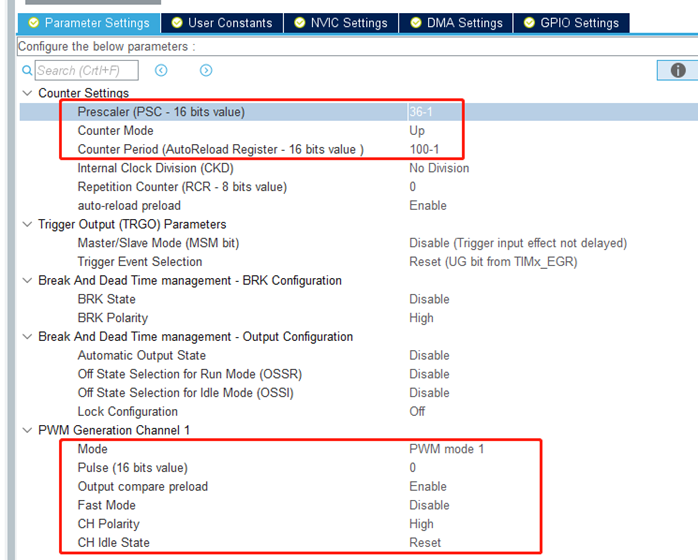
通道可以设置的值:
Mode,PWM的模式,可以选择模式1或模式2
CH Polarity,有效电平,可选高或底
(四)编程
初始化
//开启PWM输出
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
//设置默认的占空比值
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,10);
while循环改变值
HAL_Delay(30);//延时30ms //变量修改
if(i<100) i++;
else i=0; //设置占空比值
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,i);
三、 定时器之输入捕获
通过检查定时器通道上的边沿信号,在边沿信号跳变(上升沿或者下降沿)的时候,将当前定时器的计数值存储到对应的捕获/比较寄存器里面,完成一次捕获。
通常用于检测高电平持续时间、低电平持续时间、两次下降沿的持续时间、两次上升沿的持续时间
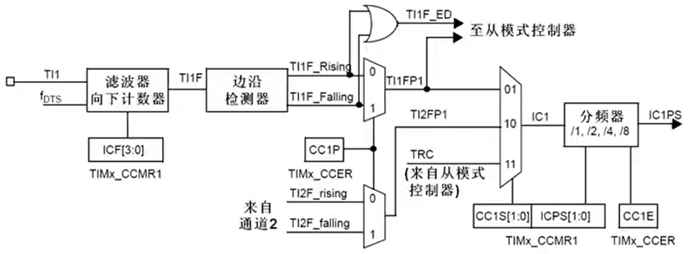
滤波器:
里可以设置以什么频率采集多少次有效电平才说明边沿触发成功,如设置的是上升沿触发,当上升沿发生时,滤波器或以fDTS的频率采集ICF设置的次数,每次检测是否是高电平,这样可以防止误触发所带来的计算干扰。
边沿检测器:
设置捕获的触发边沿,可以设置上升沿或下降沿
通道选择
通过寄存器可以设置其它通道输入的值到该通道上
如通道1和通道2都可以映射到IC1,但通常是通道1是IC1,通道2是IC2,每个独立一对一映射,互不干扰。
分频器:
每2个事件触发一次捕获,如上升沿捕获时,连续获取到两个上升沿后才会触发计数
每4个事件触发一次捕获
每8个事件触发一次捕获
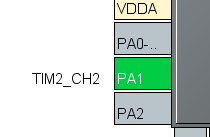
(一) CubeMX设置
开启TIM4的通道1作为输入捕获通道,对应是PB6引脚
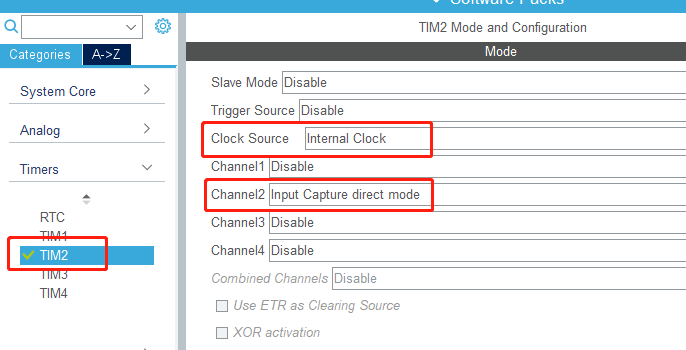
Internal Clock表示内部时钟
input capture direct mode 表示输入捕获
根据硬件连接,这里设置为上拉
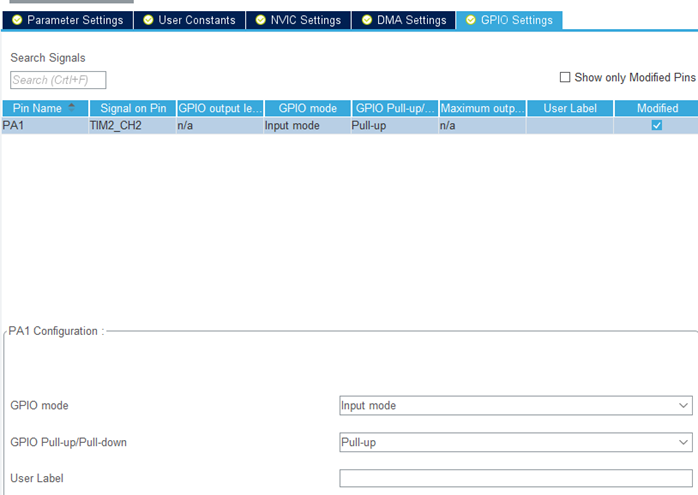
开启中断
基础配置
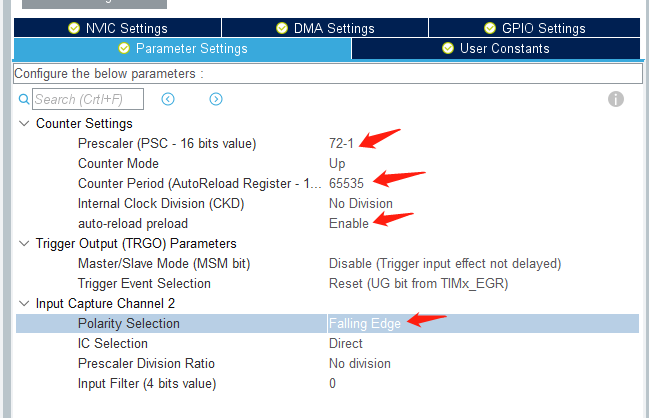
时钟:72 000 000 /72 = 1 000 000 HZ= 1MHZ,所以计数一次为1us
最大计数值为65536,约为65ms
prolarity selection 为触发计数边沿,下降沿
(二)编程
测量低电平的持续时间,先下降沿后上升沿,记录计数值,最终输出us单位。
通用函数
//变量存储
typedef struct
{
uint8_t flg; //0为未开始,1已经开始,2为结束
uint16_t num;//计数值
uint16_t num_period;//溢出次数
}COUNT_TEMP; COUNT_TEMP count_temp={0}; //捕获中断发送时的回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
//判断定时器2
if(TIM2 == htim->Instance){
if ( count_temp.flg == 0 )
{
// 清零定时器计数
__HAL_TIM_SET_COUNTER(htim,0);
//设置上升沿触发
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_2, TIM_INPUTCHANNELPOLARITY_RISING);
count_temp .flg = 1; //设置已经开始
count_temp .num_period = 0; //溢出计数清零
count_temp .num = 0; //计数清零
}
else
{
// 获取定时器计数值
count_temp .num = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_2);
//设置下降沿触发
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_2, TIM_INPUTCHANNELPOLARITY_FALLING);
count_temp .flg = 2;
}
}
} //定时器溢出回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(TIM2 == htim->Instance){
//每次溢出时间为65536us
if(count_temp.flg==1)//还未成功捕获
{
if(count_temp.num_period==0XFFFF)//电平太长了
{
count_temp.flg=2; //标记成功捕获了一次
count_temp .num=0XFFFF;
}else count_temp .num_period ++;
}
}
}
初始化
//开启定时器溢出中断
HAL_TIM_Base_Start_IT(&htim2);
//开启输入捕获中断,设置下降沿触发中断
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_2, TIM_INPUTCHANNELPOLARITY_FALLING);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_2); //启动输入捕获
while循环
//等待测量完毕
if(count_temp.flg == 2 )
{
//计数计数值,0xFFFF为最大计数
uint32_t ulTime = (uint32_t)count_temp .num_period * 0xFFFF + count_temp .num;
//输出测量的值
printf ( "低电平时间:%d us\n",ulTime);
count_temp .flg = 0;
}

原文地址:https://www.cnblogs.com/dongxiaodong/p/14351398.html
找作者:https://space.bilibili.com/162091292
STM32 定时器详细篇(基于HAL库)的更多相关文章
- STM32 GPIO输入输出(基于HAL库)
一.基础认识 GPIO全名为General Purpose Input Output,即通用输入输出.有时候简称为"IO口".通用,说明它是常见的.输入输出,就是说既能当输入口使用 ...
- Keil MDK STM32系列(七) STM32F4基于HAL的PWM和定时器
Keil MDK STM32系列 Keil MDK STM32系列(一) 基于标准外设库SPL的STM32F103开发 Keil MDK STM32系列(二) 基于标准外设库SPL的STM32F401 ...
- 【GMT43智能液晶模块】基于HAL库的SDRAM和LCD驱动例程(MDK工程&CubeMX工程)
说明: 1.该工程基于HAL库实现动态存储器SDRAM驱动以及液晶控制器LCD驱动. 2.工程通过STM32CubeMX(Version 4.22.0)配置生成,可直接打开进行配置. 3.KEIL M ...
- 【STM32H7教程】第32章 STM32H7的TIM定时器基础知识和HAL库API
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第32章 STM32H7的TIM定时器基础知识和H ...
- Keil MDK STM32系列(八) STM32F4基于HAL的PWM和定时器输出音频
Keil MDK STM32系列 Keil MDK STM32系列(一) 基于标准外设库SPL的STM32F103开发 Keil MDK STM32系列(二) 基于标准外设库SPL的STM32F401 ...
- STM32基于HAL库通过DMA读写SDIO
通过STM32CUBEMX生成DMA读写sdio的工程,再读写过程中总会卡死在DMA中断等待读写完成的while中,最终发现while等待的标志在SDIO的中断里置位的,而SDIO中断优先级如果小于或 ...
- STM32串口接收中断——基于HAL库
写在前面 最近需要使用一款STM32L4系列的芯片进行开发,需要学习使用HAL库.在进行串口中断使用的时候遇到了一些小麻烦,写下解决方案供大家参考. 1.UART相关的头文件引用错误 由于本人直接使用 ...
- 基于HAL库的STM32的DSP库详解(附FFT应用)
1 . 建立工程,生成代码时选择包含所有库. 2. 打开 option for target 选择 Target 标签,在code generatio中,将floating point hardw ...
- STM32标准外设库、 HAL库、LL库
工作以来一直使用ST的STM32系列芯片,ST为开发者提供了非常方便的开发库.到目前为止,有标准外设库(STD库).HAL库.LL库 三种.前两者都是常用的库,后面的LL库是ST最近才添加,目前支持的 ...
随机推荐
- 进入mysql数据库修改密码
mysql -hlocalhost -uroot -p #修改密码mysql> set password for root@localhost = password('root');#启动数据库 ...
- jdbc编程学习之增删改查(2)
一,enum类型的使用 在SQL中没有布尔类型的数据,我们都使用过布尔类型,当属性的值只用两种情况时.例如性别等.那在数据库对这些属性的值个数比较少时我们应该使用什么数据类型呢?SQL给我们提供了枚举 ...
- 编写通用的Makefile
一个应用程序的形成是少不了一下几个步骤的. 1. 预处理 #检查语法错误.包含头文件.展开#if.#define等宏定义 2. 编译 #把.c文件转换为汇编文件.s 3. 汇编 #把.s汇编转换为机器 ...
- 常用的linux指令
a.cd /home 进入 '/ home' 目录' b.cd .. 返回上一级目录 c.cd ../.. 返回上两级目录 d.mkdir dir1 创建一个叫做 'dir1' 的目录' e.mkdi ...
- ElasticSearch教程——分片、扩容以及容错机制(转学习使用)
一.Primary shard和replica shard机制 1.index包含多个shard; 2.每个shard都是一个最小的工作单元,承载部分的数据,Lucene实例,完整的简历索引和处理请求 ...
- 如何在面试中介绍自己的项目经验(面向java改进版)
本人于3年前写的博文,如何在面试中介绍自己的项目经验,经过大家的捧场,陆续得到了将近7万个点击量,也得到了众多网站公众号的转载,不过自己感觉,这篇文章更多的是偏重于方法,没有具体给到Java方面相关的 ...
- grep和egrep
grep nobody /etc/passwd 显示/etc/passwd中带有nobody字样的行,区分大小写 grep -i nobody /etc/passwd 现实/etc/passwd中 ...
- 翻译 - ASP.NET Core 托管和部署 - 在 Linux 上使用 Nginx 托管 ASP.NET Core 网站
翻译自 https://docs.microsoft.com/en-us/aspnet/core/host-and-deploy/linux-nginx?view=aspnetcore-5.0 本文介 ...
- kubernets之从应用访问pod元数据以及其他资源
一 downwardAPI的应用 1.1 前面我们介绍了如何通过configmap以及secret将配置传入到pod的容器中,但是传递的这些都是预先能够安排和只晓得,对于那些只有当pod创建起来之 ...
- CTFshow-萌新赛杂项_签到
查看网页信息 http://game.ctf.show/r2/ 把网页源码下载后发现有大片空白 使用winhex打开 把这些16进制数值复制到文件中 把20替换为0,09替换为1后 得到一串二进制数值 ...