4412 Linux设备总线
总线_设备_驱动注册流程详解
注册流程图
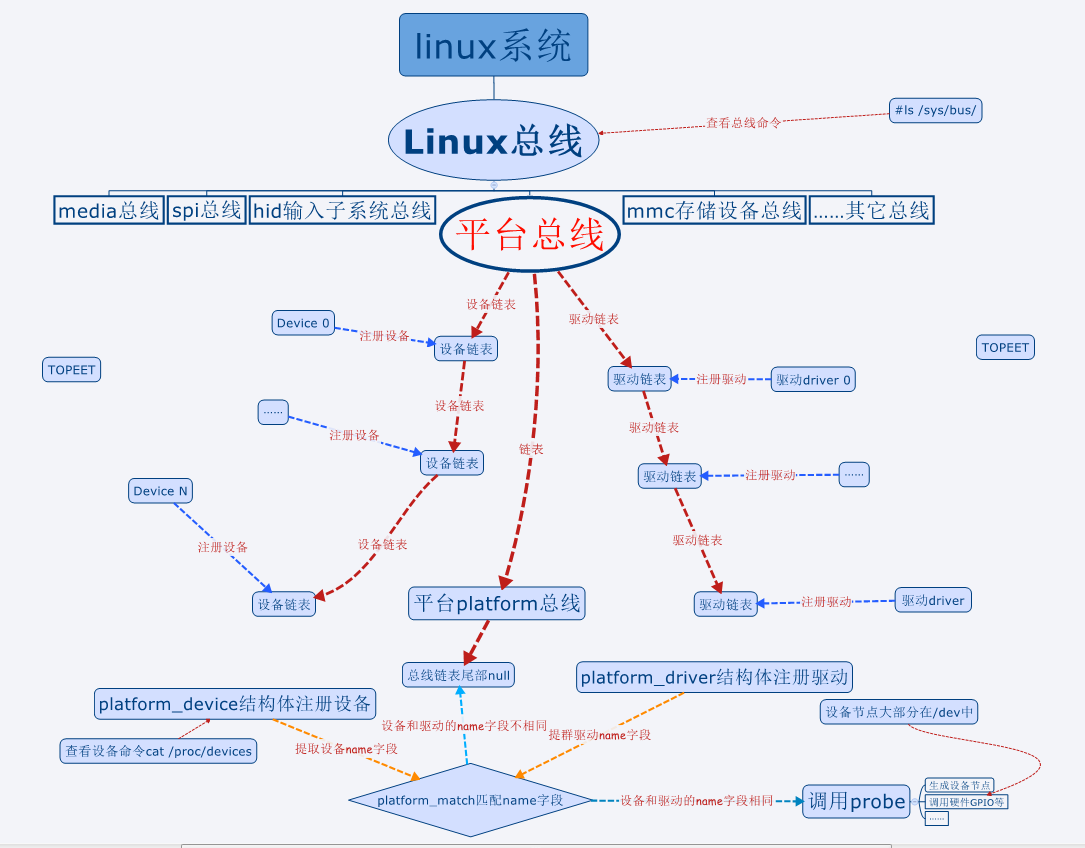
• 设备一般都需要先注册,才能注册驱动
– 现在越来越多的热拔插设备,反过来了。先注册驱动,设备来了再注册
设备
• 本节使用的命令
– 查看总线的命令#ls /sys/bus/
– 查看设备号的命令#cat /proc/devices
• 设备都有主设备号和次设备号,否则255个设备号不够用
– 查看杂项设备号的命令#cat /proc/misc
二、总线设备注册
关于注册设备的一点说明
• 早先的Linux会使用单独的文件注册设备,现在大多是使用引入的虚拟平台,使用虚拟平台来注册设备会容易很多
• 如果大家在网上看到大段的注册设备的代码,可简单了解一下,知道有这么个东西就成,不用去深究。不要去学习“屠龙技”,现在基本都是直接在平台文件中注册设备
注册设备
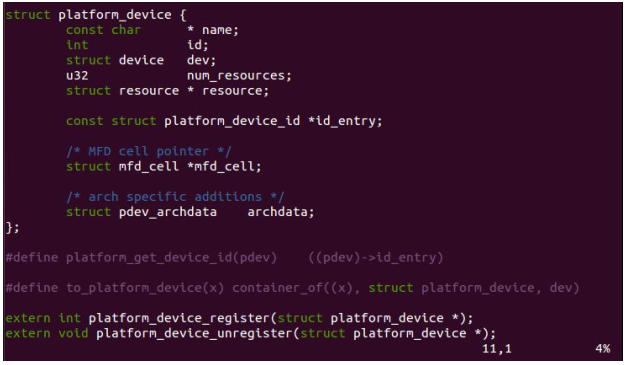
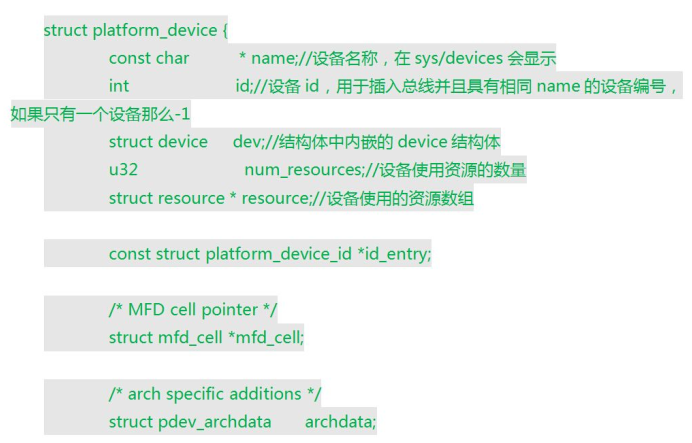
• 注册设备使用结构体platform_device,该结构体在头文件“vim include/linux/platform_device.h”中。头文件中也有注册设备和卸载设备的函数,了解即可
操作过程
– 注册设备。将设备结构体放到平台文件中,会自动注册设备,不用去调用注册设备的函数。
vim arch/arm/mach-exynos/mach-itop4412.c
添加设备注册
#ifdef CONFIG_HELLO_CTL
struct platform_device s3c_device_hello_ctl = {
.name = "hello_ctl",
.id = -,
};
#endif #ifdef CONFIG_LEDS_CTL
struct platform_device s3c_device_leds_ctl = {
.name = "leds",
.id = -,
};
#endif
和这个
#ifdef CONFIG_HELLO_CTL
&s3c_device_hello_ctl,
#endif #ifdef CONFIG_LEDS_CTL
&s3c_device_leds_ctl,
#endif
– 在Kconfig文件中添加编译HELLO设备的宏定义(前面教程中已经添加)
– 配置menuconfig中的HELLO宏定义,生成新的.config文件
– 生成新的zImage
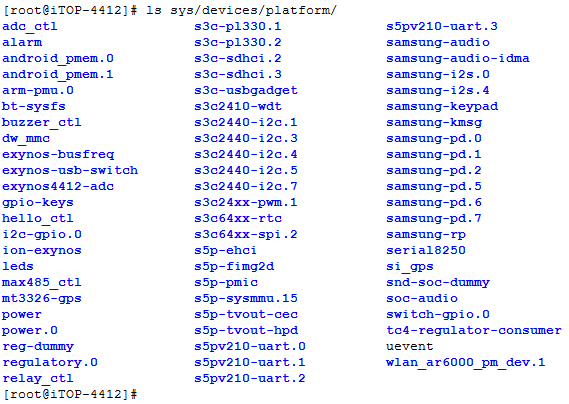
• 注册完之后在虚拟平台总线下可以查到注册的设备
– ls /sys/devices/platform/
中间遇到的问题:编译make zImage的时候提示
arch/arm/mach-exynos/mach-itop4412.c:: error: 's3c_device_hello_ctl' undeclared here (not in a function)
这个的没有写正确
#ifdef CONFIG_HELLO_CTL
struct platform_device s3c_device_hello_ctl = {
三、总线驱动注册
头文件
• 驱动注册使用结构体platform_driver,该结构体在头文件“vim include/linux/platform_device.h”中
• 驱动注册platform_driver_register,驱动卸载函数 platform_driver_unregister也在这个头文件中
– 这两个函数的参数都只有结构体platform_driver
struct platform_driver {
int (*probe)(struct platform_device *);
int (*remove)(struct platform_device *);
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state);
int (*resume)(struct platform_device *);
struct device_driver driver;
const struct platform_device_id *id_table;
};
注册结构体
• 驱动常见的几种状态,初始化,移除,休眠,复位
– 就像PC一样,有的驱动休眠之后无法使用,有的可以使用;有的系统唤醒之后,驱动需要重新启动才能正常工作,也有直接就可以使用等等
• probe函数:platform_match函数匹配之后,驱动调用的初始化函数
• remove函数: 移除驱动函数
• suspend函数: 悬挂(休眠)驱动函数
• resume函数: 休眠后恢复驱动
• device_driver数据结构的两个参数
– name和注册的设备name要一致
– owner一般赋值THIS_MODULE
#include <linux/module.h>
#include <linux/init.h> /* device register header file, include device and driver struct
* register and remove function */
#include <linux/platform_device.h> #define DRIVER_NAME "hello_ctl" MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("TOPEET"); static int hello_probe(struct platform_driver *pdv)
{
printk(KERN_EMERG "\tinitialized\n");
return ;
} static int hello_remove(struct platform_driver *pdv)
{
return ;
} static void hello_shutdown(struct platform_driver *pdv)
{ } static int hello_suspend(struct platform_driver *pdv)
{
return ;
} static int hello_resume(struct platform_driver *pdv)
{
return ;
} struct platform_driver hello_driver = {
.probe = hello_probe,
.remove = hello_remove,
.shutdown = hello_shutdown,
.suspend = hello_suspend,
.resume = hello_resume,
.driver = {
.name = DRIVER_NAME,
.owner = THIS_MODULE,
}
}; static int hello_init(void)
{
int DriverState; printk(KERN_EMERG "Hello world enter!\n");
DriverState = platform_driver_register(&hello_driver); printk(KERN_EMERG "\tDriverState is %d\n", DriverState);
return ;
} static void hello_exit(void)
{
printk(KERN_EMERG "Hello world exit!\n");
platform_driver_unregister(&hello_driver);
} module_init(hello_init);
module_exit(hello_exit);
register driver
实验
• 在mini_linux_module的基础上添加驱动注册部分
• 编译,在开发板上加载和卸载驱动
mount -t nfs -o nolock 192.168.2.147:/home/topeet/linux /mnt/nfs
挂载了nfs后,加载内核后
[root@iTOP-]# insmod probe_linux_module.ko
[ 8454.570719] Hello world enter!
[ 8454.572614] initialized
[ 8454.582781] DriverState is
[root@iTOP-4412]# rmmod probe_linux_module
[ 8647.985422] Hello world exit!
4412 Linux设备总线的更多相关文章
- Linux 设备总线驱动模型
尽管LDD3中说对多数程序员掌握设备驱动模型不是必要的,但对于嵌入式Linux的底层程序员而言,对设备驱动模型的学习非常重要. Linux设备模型的目的:为内核建立一个统一的设备模型,从而又一 ...
- Linux设备总线
kobject和kset是Linux设备模型中最基本的元素,其中,kset是同种类型kobject对象的集合.每个在内核中注册的kobject对象都对于sysfs文件系统中的一个目录.下面是自己花的一 ...
- linux设备驱动归纳总结(九):1.platform总线的设备和驱动【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-111745.html linux设备驱动归纳总结(九):1.platform总线的设备和驱动 xxxx ...
- linux设备驱动归纳总结(八):4.总线热插拔【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-110774.html linux设备驱动归纳总结(八):4.总线热插拔 xxxxxxxxxxxxxxx ...
- linux设备驱动归纳总结(八):2.总线、设备和驱动的关系【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-110295.html linux设备驱动归纳总结(八):2.总线.设备和驱动的关系 xxxxxxxxx ...
- linux设备驱动归纳总结(八):1.总线、设备和驱动【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-109733.html linux设备驱动归纳总结(八):1.总线.设备和驱动 xxxxxxxxxxxx ...
- Linux设备模型(总线、设备、驱动程序和类)
Linux设备驱动程序学习(13) -Linux设备模型(总线.设备.驱动程序和类)[转] 文章的例子和实验使用<LDD3>所配的lddbus模块(稍作修改). 提示:在学习这部分内容是一 ...
- linux PMBus总线及设备驱动分析
PMBus协议规范介绍 PMBus是一套对电源进行配置.控制和监控的通讯协议标准.其最新版本为1.3,该规范还在不断演进中,比如新标准中新增的zone PMBus.AVSBus等特性.在其官网上有详细 ...
- 芯灵思SinlinxA33开发板 Linux平台总线设备驱动
1.什么是platform(平台)总线? 相对于USB.PCI.I2C.SPI等物理总线来说,platform总线是一种虚拟.抽象出来的总线,实际中并不存在这样的总线. 那为什么需要platform总 ...
随机推荐
- 前后端分离及React的一些研究
前言 在对英才网企业线前端不断的完善过程中,我们尝试进行了前后端分离,引入Node环境.以及在使用React的过程中,自行开发DOM渲染框架,解决React兼容低版本IE的问题,在这个过程中,我们有了 ...
- Python——GUI可视化
import sys from PyQt5.QtCore import * from PyQt5.QtGui import * from PyQt5.QtWidgets import * class ...
- Minimum Cost 【POJ - 2516】【网络流最小费用最大流】
题目链接 题意: 有N个商家它们需要货物源,还有M个货物供应商,N个商家需要K种物品,每种物品都有对应的需求量,M个商家每种物品都是对应的存货,然后再是K个N*M的矩阵表示了K个物品从供货商运送到商家 ...
- Spring MVC浅析
讲到MVC,想必大家都很熟悉,就是将数据模型.视图.控制器进行分离,做到分工明确,在Spring的帮助下,Spring MVC 更是做到了充分的解耦,因为大部分的资源都由Spring进行管理,为Spr ...
- 使用notepad++写markdown的配置过程
已过时 下载最新的markdown插件,github 解压后将MarkdownViewerPlusPlus.dll复制一份到notepad就能看到markdown插件的小图标了 设置markdown高 ...
- java.sql.SQLException:连接是只读的。不允许导致数据修改的查询
我的项目中 service的实现类少了写一个注解 : 只读事务(@Transactional(readOnly = true) 应用场合: 如果你一次执行单条查询语句,则没有必要启用事务支持,数据 ...
- python中函数的嵌套和作用域链
1.三元运算if条件成立的结果 if 条件 else 条件不成立的结果例如: a=20 b=10 c=a if a>b else b print(c) 2.命名空间 全局命名空间:创建的存储“变 ...
- eclipse新建maven项目出错 pom.xml报错
问题: 1.新建项目后会提示一个这样的错 maven-compiler-plugin:3.1:compile(1 errors) maven-compiler-plugin:3.1:testCompi ...
- knn原理及借助电影分类实现knn算法
KNN最近邻算法原理 KNN英文全称K-nearst neighbor,中文名称为K近邻算法,它是由Cover和Hart在1968年提出来的 KNN算法原理: 1. 计算已知类别数据集中的点与当前点之 ...
- echarts之折线图介绍及使用
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...