teb教程5
跟随全局规划器
简介:本部分是关于如何配置局部规划器严格跟随全局规划,也包括调节在时优和路径跟随上的权衡。
1.先看一下via-points当前的优化行为:启动下面节点
roslaunch teb_local_planner test_optim_node.launch
rosrun rqt_reconfigure rqt_reconfigure
为了方便调试参数(默认via-points并为开启)
现在设置global_plan_viapoint-sep为一个正值。正值就激活了via-points的考虑。
在rviz上选择publish point,该publish point在起始和结束之间的,为了添加一个点需要选择一个对象,也可以简单任意在栅格上选择一个点。
如下图所示:
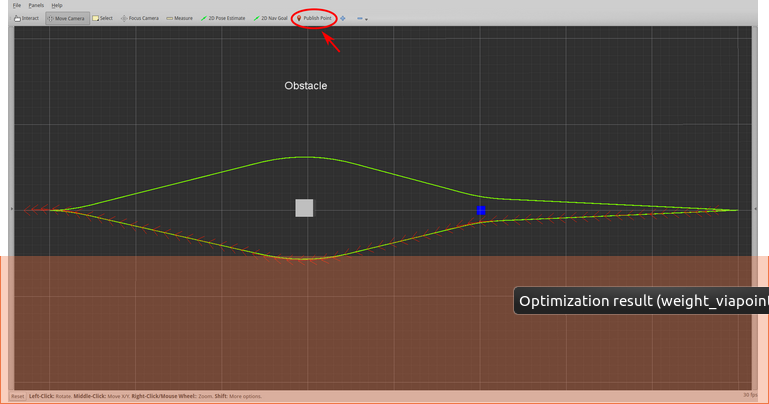
轨迹确实会被via-point所吸引,但是轨迹不能reach到它。主要原因是优化器会尝试找到时间最小化的轨迹同时最小化到via-point的距离。在这里有两个冲突的对象只要via-point不直接在最小化时间轨迹上的话。产生的全局最小是经过对目标对象权衡后的。通过在代价函数中增加权重,用户可以设置期望的选择来是全局最小化转移。
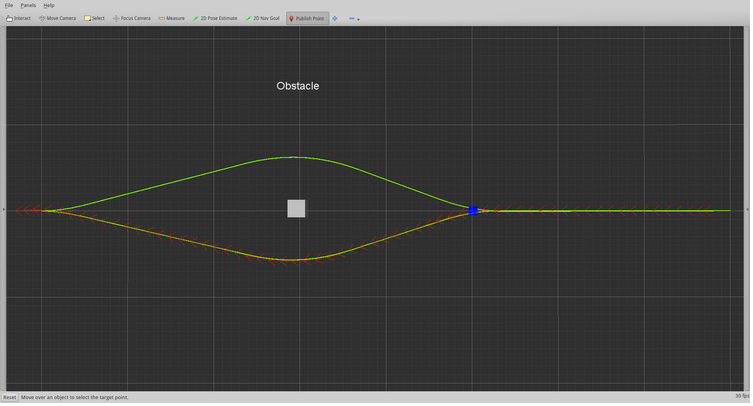
最小化到via-point的距离的权重由weight_viapoint所决定,现在增加该值大于1.
下图设置的weight_viapoint为10的结果:
现在可以尝试增加更多的via-point,然后调整weight_viapoint,观察会发生什么。
注意:障碍物避障(保持与障碍物最小的距离)可能会与最小化与via-point的距离相冲突。不要选择weight_viapoint的值太大,以便obstacle 代价是可忽略的了。
规划器甚至适用于更复杂的场景,例如:当访问一组任意的via-points点集的时候,可以在到达目标的时间是最小的。
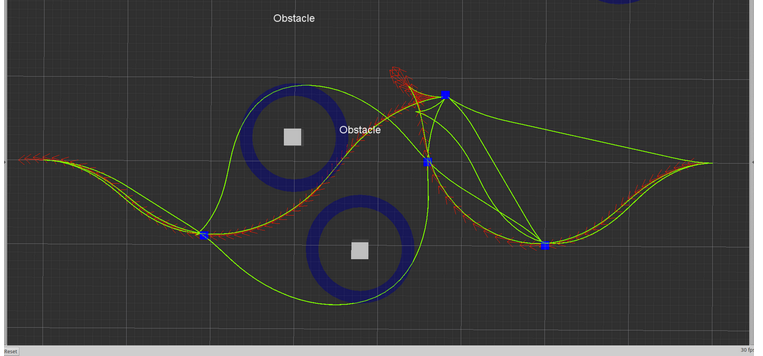
如果在轨迹上相对于via-point的最近点是起始或者目标位姿,然后via-point会被忽略。因此你添加的via-points在开始之前或者在结束之后都不会被考虑进来。不影响导航行为,因为轨迹是根据全局规划来初始化的。
2.在替代的拓扑中规划
两个不同策略的使用取决于参数viapoints_all_candidates的选择:
1).设置为真,所有生成的候选轨迹与via-points相联系的,每一个对应的优化器会尝试最小化到他们的距离。
2).设置为假,只有候选的轨迹,该轨迹属于全局规划相对于via-point优化后的拓扑才会被考虑,其他均被忽略。
3.导航:跟随全局规划
运行如下节点:
roslaunch teb_local_planner_tutorials robot_diff_drive_in_stage.launch
rosrun rqt_reconfigure rqt_reconfigure
根据优化的例子,通过设置global_plan_via_point_sep为正值0.5来使能via-points.
在rviz上设置新的目标点,参数global_plan_via_point_sep的值定义了在全局规划上两个连续的via-points点之间的最小分割距离。例如设置为0.5米,每0.5米一个新的点从全局规划中选择出来(只要全局规划的分辨率足够)。因此,通过调整这个值,你可以指定是否一个粗糙的或者一个精细的参考路径被考虑进来用于路径跟随。
现在设置不同的目标点以及不同的global_plan_via_point_sep以及weight_viapoint的值。
注意,一个太精细的分辨率对于一个大的优化权重来说,可能会影响障碍物避障行为,特别是对于动态障碍物。
teb教程5的更多相关文章
- teb教程1
http://wiki.ros.org/teb_local_planner/Tutorials/Setup%20and%20test%20Optimization 简介:本部分关于teb怎样优化轨迹以 ...
- teb教程8
融合动态障碍物 简介:考虑怎样把其他节点发布的动态障碍物考虑进来 1.本部分演示了动态障碍物该如何被包含到teb_local_planner中. 2.写一个简单的动态障碍物的发布器publish_dy ...
- teb教程3
配置和运行机器人导航 简介:配置teb_local_planner作为navigation中local planner的插件 参考teb安装 由于局部代价地图的大小和分辨率对优化性能影响很大,因为占据 ...
- teb教程10 teb questions
http://wiki.ros.org/teb_local_planner/Tutorials/Frequently%20Asked%20Questions
- teb教程9
通过costmap_converter来跟踪和包含动态障碍物 简介:利用costmap_converter来很容易跟踪动态障碍物 1.costmap_converter中提供了一个插件称之为costm ...
- teb教程7
融合自定义的障碍物 简介:本部分讲解怎样考虑其他节点发布的多边形的障碍物. 1.在一些应用当中,可能不想依赖于代价地图或者想添加其他的除了点状的障碍物.你可以发送你自己的障碍物列表到teb_local ...
- teb教程6
代价地图的转换 简介:本部分关于怎样把代价地图转换插件应用到转换占据栅格costmap2d到几何形状来优化(测试阶段) teb_local_planner包支持costmap_converter插件, ...
- teb教程4
障碍物避障以及机器人足迹模型 简介:障碍物避障的实现,以及必要参数的设置对于机器人足迹模型和其对应的影响 1.障碍物避障是怎样工作的 1.1 惩罚项 障碍物避障作为整个路径优化的一部分.显然,优化是找 ...
- teb教程2
http://wiki.ros.org/teb_local_planner/Tutorials/Inspect%20optimization%20feedback 检查优化反馈 简介:怎样检查优化的轨 ...
随机推荐
- flex 的经典用法
Document 11 21 31 41 51 61 71 81 91 101 111 121 131 141 151 161 171 181 191 201 211 221 231 241 25 ...
- wxDateTime用法和转换成wxString
转载别人的.void datetest() { wxDateTime now=wxDateTime::Now(); wxString date1=now.Format(); wxString date ...
- awk 起始位置和长度和 mf 一致
1位开始 , 925开始 截取24 awk '{OFS="";print(substr($0,925,24),substr($0,1,24),substr($0,436,1),&q ...
- mongoose 与 mylab 的使用 (1)
1.引入mongoose 模块 const mongoose = require('mongoose'); 2.连接数据库 //连接数据库 mongoose.connect( db, {useNew ...
- ECUST_Algorithm_2019_1
简要题意及解析 1001 求\(a+b\). 数据范围很大,用int或者long long不行.Java和python可以使用大数直接写. 高精度加法:做法就是将数据读入字符串中,数组的每一个单元存一 ...
- Motan框架初体验
1.什么是Motan? Motan是一套基于java开发的RPC框架,除了常规的点对点调用外,motan还提供服务治理功能,包括服务节点的自动发现.摘除.高可用和负载均衡等.Motan具有良好的扩展性 ...
- ActiveMQ消息中间件Producer和Consumer
ActiveMQ消息中间件Producer和Consumer 原创jethai2015-08-18 18:08:56评论(0)1480人阅读 生产者代码: 1 2 3 4 5 6 7 8 9 10 ...
- hdu 2089 不要62 (数位dp)
Description 杭州人称那些傻乎乎粘嗒嗒的人为62(音:laoer). 杭州交通管理局经常会扩充一些的士车牌照,新近出来一个好消息,以后上牌照,不再含有不吉利的数字了,这样一来,就可以消除个别 ...
- winform 控件拖拽和缩放
核心类: using System; using System.Collections.Generic; using System.Drawing; using System.Linq; using ...
- 探索Redis设计与实现2:Redis内部数据结构详解——dict
本文转自互联网 本系列文章将整理到我在GitHub上的<Java面试指南>仓库,更多精彩内容请到我的仓库里查看 https://github.com/h2pl/Java-Tutorial ...