OpenCvSharp 通过特征点匹配图片
现在的手游基本都是重复操作,一个动作要等好久,结束之后继续另一个动作.很麻烦,所以动起了自己写一个游戏辅助的心思.
这个辅助本身没什么难度,就是通过不断的截图,然后从这个截图中找出预先截好的能代表相应动作的按钮或者触发条件的小图.
找到之后获取该子区域的左上角坐标,然后通过windows API调用鼠标或者键盘做操作就行了.
这里面最难的也就是找图了,因为要精准找图,而且最好能适应不同的分辨率下找图,所以在模板匹配的基础上,就有了SIFT和SURF的特征点找图方式.
在写的过程中查找资料,大都是C++ 或者python的, 很少有原生的C#实现, 所以我就直接拿来翻译过来了(稍作改动).
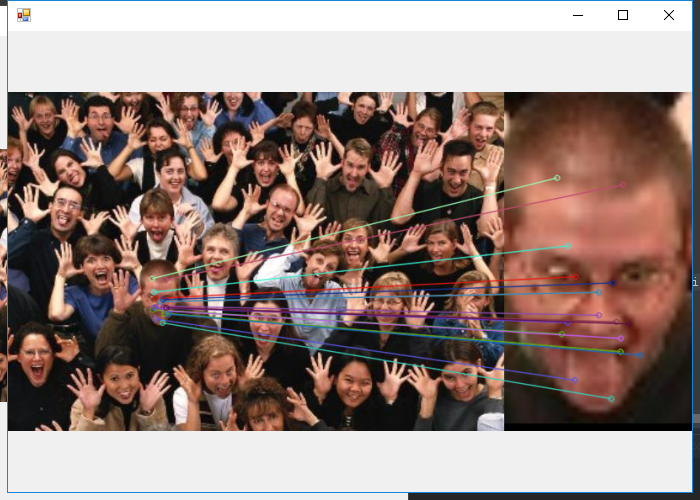
SIFT算法
public static Bitmap MatchPicBySift(Bitmap imgSrc, Bitmap imgSub)
{
using (Mat matSrc = imgSrc.ToMat())
using (Mat matTo = imgSub.ToMat())
using (Mat matSrcRet = new Mat())
using (Mat matToRet = new Mat())
{
KeyPoint[] keyPointsSrc, keyPointsTo;
using (var sift = OpenCvSharp.XFeatures2D.SIFT.Create())
{
sift.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);
sift.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);
}
using (var bfMatcher = new OpenCvSharp.BFMatcher())
{
var matches = bfMatcher.KnnMatch(matSrcRet, matToRet, k: ); var pointsSrc = new List<Point2f>();
var pointsDst = new List<Point2f>();
var goodMatches = new List<DMatch>();
foreach (DMatch[] items in matches.Where(x => x.Length > ))
{
if (items[].Distance < 0.5 * items[].Distance)
{
pointsSrc.Add(keyPointsSrc[items[].QueryIdx].Pt);
pointsDst.Add(keyPointsTo[items[].TrainIdx].Pt);
goodMatches.Add(items[]);
Console.WriteLine($"{keyPointsSrc[items[0].QueryIdx].Pt.X}, {keyPointsSrc[items[0].QueryIdx].Pt.Y}");
}
} var outMat = new Mat(); // 算法RANSAC对匹配的结果做过滤
var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);
var pDst = pointsDst.ConvertAll(Point2fToPoint2d);
var outMask = new Mat();
// 如果原始的匹配结果为空, 则跳过过滤步骤
if (pSrc.Count > && pDst.Count > )
Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);
// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).
if (outMask.Rows > )
{
byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];
outMask.GetArray(, , maskBytes);
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);
}
else
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);
return OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);
}
}
}
SURF算法
public static Bitmap MatchPicBySurf(Bitmap imgSrc, Bitmap imgSub, double threshold = )
{
using (Mat matSrc = imgSrc.ToMat())
using (Mat matTo = imgSub.ToMat())
using (Mat matSrcRet = new Mat())
using (Mat matToRet = new Mat())
{
KeyPoint[] keyPointsSrc, keyPointsTo;
using (var surf = OpenCvSharp.XFeatures2D.SURF.Create(threshold,,,true,true))
{
surf.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);
surf.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);
} using (var flnMatcher = new OpenCvSharp.FlannBasedMatcher())
{
var matches = flnMatcher.Match(matSrcRet, matToRet);
//求最小最大距离
double minDistance = ;//反向逼近
double maxDistance = ;
for (int i = ; i < matSrcRet.Rows; i++)
{
double distance = matches[i].Distance;
if (distance > maxDistance)
{
maxDistance = distance;
}
if (distance < minDistance)
{
minDistance = distance;
}
}
Console.WriteLine($"max distance : {maxDistance}");
Console.WriteLine($"min distance : {minDistance}"); var pointsSrc = new List<Point2f>();
var pointsDst = new List<Point2f>();
//筛选较好的匹配点
var goodMatches = new List<DMatch>();
for (int i = ; i < matSrcRet.Rows; i++)
{
double distance = matches[i].Distance;
if (distance < Math.Max(minDistance * , 0.02))
{
pointsSrc.Add(keyPointsSrc[matches[i].QueryIdx].Pt);
pointsDst.Add(keyPointsTo[matches[i].TrainIdx].Pt);
//距离小于范围的压入新的DMatch
goodMatches.Add(matches[i]);
}
} var outMat = new Mat(); // 算法RANSAC对匹配的结果做过滤
var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);
var pDst = pointsDst.ConvertAll(Point2fToPoint2d);
var outMask = new Mat();
// 如果原始的匹配结果为空, 则跳过过滤步骤
if (pSrc.Count > && pDst.Count > )
Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);
// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).
if (outMask.Rows > )
{
byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];
outMask.GetArray(, , maskBytes);
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);
}
else
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);
return OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);
}
}
}
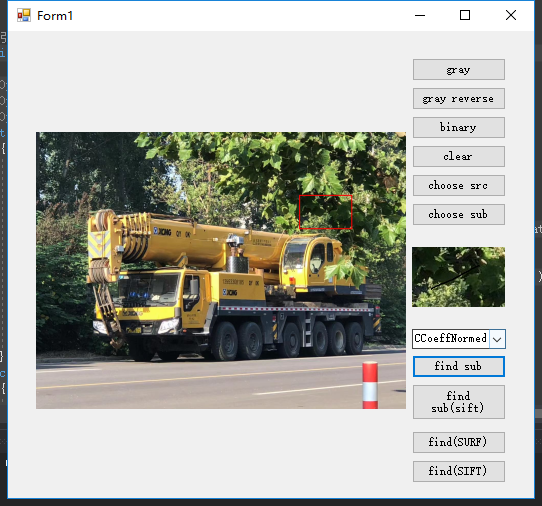
模板匹配
public static System.Drawing.Point FindPicFromImage(Bitmap imgSrc, Bitmap imgSub, double threshold = 0.9)
{
OpenCvSharp.Mat srcMat = null;
OpenCvSharp.Mat dstMat = null;
OpenCvSharp.OutputArray outArray = null;
try
{
srcMat = imgSrc.ToMat();
dstMat = imgSub.ToMat();
outArray = OpenCvSharp.OutputArray.Create(srcMat); OpenCvSharp.Cv2.MatchTemplate(srcMat, dstMat, outArray, Common.templateMatchModes);
double minValue, maxValue;
OpenCvSharp.Point location, point;
OpenCvSharp.Cv2.MinMaxLoc(OpenCvSharp.InputArray.Create(outArray.GetMat()), out minValue, out maxValue, out location, out point);
Console.WriteLine(maxValue);
if (maxValue >= threshold)
return new System.Drawing.Point(point.X, point.Y);
return System.Drawing.Point.Empty;
}
catch(Exception ex)
{
return System.Drawing.Point.Empty;
}
finally
{
if (srcMat != null)
srcMat.Dispose();
if (dstMat != null)
dstMat.Dispose();
if (outArray != null)
outArray.Dispose();
}
}
OpenCvSharp 通过特征点匹配图片的更多相关文章
- sift、surf、orb 特征提取及最优特征点匹配
目录 sift sift特征简介 sift特征提取步骤 surf surf特征简介 surf特征提取步骤 orb orb特征简介 orb特征提取算法 代码实现 特征提取 特征匹配 附录 sift si ...
- aforge通过角点匹配图片相似度
我不知道什么原因,人品不好还是啥的 ExhaustiveTemplateMatching这个类无法高精确度的匹配图片 ........... 换一种方式,就好得多 /// <summary> ...
- OpenCV使用FLANN进行特征点匹配
使用FLANN进行特征点匹配 目标 在本教程中我们将涉及以下内容: 使用 FlannBasedMatcher 接口以及函数 FLANN 实现快速高效匹配( 快速最近邻逼近搜索函数库(Fast Appr ...
- opencv 增强现实(二):特征点匹配
import cv2 as cv import numpy as np # def draw_keypoints(img, keypoints): # for kp in keypoints: # x ...
- 第二篇 特征点匹配以及openvslam中的相关实现详解
配置文件 在进入正题之前先做一些铺垫,在openvslam中,配置文件是必须要正确的以.yaml格式提供,通常需要指明使用的相机模型,ORB特征检测参数,跟踪参数等. #==============# ...
- (2)特征点匹配,并求旋转矩阵R和位移向量t
include头文件中有slamBase.h # pragma once // 各种头文件 // C++标准库 #include <fstream> #include <vector ...
- 图像特征点匹配C代码
#include "opencv2/core/core.hpp" #include "highgui.h" #include "opencv2/img ...
- [OpenCV]DMatch类和KeyPoints类:特征点匹配
DMatch struct CV_EXPORTS_W_SIMPLE DMatch { CV_WRAP DMatch() : queryIdx(-), trainIdx(-), imgIdx(-), d ...
- opencv surf特征点匹配拼接源码
http://blog.csdn.net/huixingshao/article/details/42672073 /** * @file SURF_Homography * @brief SURF ...
随机推荐
- 最全的Vue组件通信方式总结
1.一图认清组件关系名词 父子关系:A与B.A与C.B与D.C与E 兄弟关系:B与C 隔代关系:A与D.A与E 非直系亲属:D与E 总结为三大类: 父子组件之间通信 兄弟组件之间通信 跨级通信 2.8 ...
- ioc和aop的区别
IoC,(Inverse of Control)控制反转,其包含两个内容:其一是控制,其二是反转.在程序中,被调用类的选择控制权从调用它的类中移除,转交给第三方裁决.这个第三方指的就是Spring的容 ...
- TreeSet类的排序
TreeSet支持两种排序方法:自然排序和定制排序.TreeSet默认采用自然排序. 1.自然排序 TreeSet会调用集合元素的compareTo(Object obj)方法来比较元素之间大小关系, ...
- pyhthon字典练习题
pyhthon字典练习题: 有如下集合: [11,22,33,44,55,66,77,88,99] 将所有大于55的值保存至第一个KEY值中,将所有小于55的值保存至第二个KEY值中.{"k ...
- @Validated和@Valid的区别?校验级联属性(内部类)
每篇一句 NBA里有两大笑话:一是科比没天赋,二是詹姆斯没技术 相关阅读 [小家Java]深入了解数据校验:Java Bean Validation 2.0(JSR303.JSR349.JSR380) ...
- eclipse Mac 下补全代码
1. 每次输入都自动提示 点击 Eclipse,使其成为第一响应者,preferences->Java->Editor->Content Assist再右下角 Auto activa ...
- 关于STM32F103+ESP8266+阿里云过程之修改SDK支持UART和SmartConfig(四)
设备上报状态到阿里云成功之后,还要接受来至云端下发的命令,如APP.在ESP8266接受到数据之后可将数据先进行解析,再通过自定义协议与STM32进行串口通讯,也可以将接收到的数据中的信息直接传输到U ...
- Docker Toolbox安装
公司最近搭建docker环境,其中会遇到一些问题,在这里记录一下. 先来了解一下docker 一.基本概念 1.Docker中基本概念镜像(Image) 提到镜像,有对操作系统有一定认知的都知道,镜像 ...
- Mac 10.14.4 编译openjdk1.9源码 及集成clion动态调试
警告⚠️:本文耗时很长,先做好心理准备:编译openjdk源码需要很大的耐心,因为要踩很多坑,解决很多问题,本人从编译开始到结束用了两天时间,按照本篇教程踩坑会少许:谢谢观看 一.获取openjdk源 ...
- 【React踩坑记三】React项目报错Can't perform a React state update on an unmounted component
意思为:我们不能在组件销毁后设置state,防止出现内存泄漏的情况 分析出现问题的原因: 我这里在组件加载完成的钩子函数里调用了一个EventBus的异步方法,如果监听到异步方法,则会更新state中 ...