openc —— Canny 边缘检测
边缘检测的一般步骤
【第一步】滤波
边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核,然后基于高斯核对图像灰度矩阵的每一点进行加权求和。
【第二步】增强
增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来,在具体编程实现时,可通过计算梯度幅值来确定。
【第三步】检测
通过增强的图像,往往领域中有很多点的梯度值比较大,而在特定的应用中这些点并不是要找的边缘点,所以应该采用某种方法来对这些点进行取舍,实际工程中,常用的方法是通过阈值化方法来检测。
Canny 算子简介
Canny 边缘检测算子是 John F.Canny 于 1986 年开发出来的一个多级边缘检测算法。更为重要的是,Canny 创立了边缘检测计算理论,解释了这项技术是如何工作的。Canny 边缘检测算法以 Canny 的名字命名,被很多人推崇为最优的边缘检测的算法。
最优边缘检测的三个主要评价标准:
- 低错误率:标识出尽可能多的实际边缘,同时尽可能地减少噪声产生的误差。
- 高定位性:标识出的边缘要与图像中的实际边缘尽可能接近。
- 最小相应:图像中的边缘只能标记一次,并且可能存在的图像噪声不应被识别为边缘。
Canny 边缘检测的步骤
【第一步】转化为灰度图并消除噪声
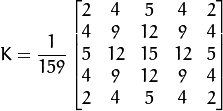
一般情况下,使用高斯平滑滤波器卷积降噪。下面显示了一个  的高斯内核示例:
的高斯内核示例:
【第二步】计算梯度幅值和方向
此处,按照 Sobel 滤波器的步骤来操作:
https://www.cnblogs.com/bjxqmy/p/12325852.html
① 运用一对卷积阵列 (分别作用于  和
和  方向)
方向)
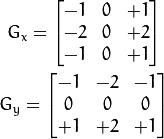
② 使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一 —— 0 度, 45 度, 90 度, 135 度
【第三步】非极大值抑制
这一步排除非边缘像素,仅仅保留了一些细线条(候选边缘)。
【第四步】滞后阈值
滞后阈值需要两个阈值:
① 若某一像素位置的幅值超过高阈值,该像素被保留为边缘像素。
② 若某一像素位置的幅值小于低阈值,该像素被排除。
③ 若某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于高阈值的像素时被保留。
Canny 边缘检测:Canny 函数
void Canny(InputArray image, OutputArray edges, double threshold1, double threshold2, int apertureSize = 3, bool L2gradient = false);
- image,输入图像,即源图像,填 Mat 类对象即可,彩色或灰度图像均可,但一般为经过高斯模糊后的灰度图。
- edges,输出的边缘图,和源图像有一样的尺寸,且为二值图像。
- threshold1,第一个滞后性阈值。
- threshold2,第二个滞后性阈值。
- apertureSize,Sobel 算子的孔径大小,其有默认值 3。
- L2gradient,一个计算图像梯度值幅度的标识,如果为 true,则使用更精确的 L2 范数进行计算(即某点梯度 = 两个方向导数的平方和再开方),默认为 false,使用 L1 范数(某点梯度 = 两个方向导数的绝对值相加)。
需要注意的是,函数阈值 1 和函数阈值 2 两者中较小的值用于边缘连接,而较大的值用来控制强边缘的初始段,推荐的高低阈值比在 2:1 到 3:1 之间。
代码示例:
#include<opencv.hpp>
using namespace cv;
int main() {
Mat src = imread("C:/Users/齐明洋/Desktop/证件照/7.jpg");
GaussianBlur(src, src, Size(, ), , );
imshow("src", src);
Mat gray, canny_img;
cvtColor(src, gray, COLOR_BGR2GRAY);
Canny(gray, canny_img, , , );
imshow("canny_img", canny_img); waitKey();
}
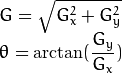
效果演示:
借鉴博客:https://www.cnblogs.com/pacino12134/p/9877971.html
openc —— Canny 边缘检测的更多相关文章
- Canny边缘检测
1.Canny边缘检测基本原理 (1)图象边缘检测必须满足两个条件:一能有效地抑制噪声:二必须尽量精确确定边缘的位置. (2)根据对信噪比与定位乘积进行测度,得到最优化逼近算子.这 ...
- OpenCV图像Canny边缘检测
Canny边缘检测 图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘函数原型: void cvCanny( ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- 从视频文件中读入数据-->将数据转换为灰度图-->对图像做canny边缘检测-->将这三个结构显示在一个图像中
//从视频文件中读入数据-->将数据转换为灰度图-->对图像做canny边缘检测-->将这三个结构显示在一个图像中 //作者:sandy //时间:2015-10-10 #inclu ...
- [转载+原创]Emgu CV on C# (六) —— Emgu CV on Canny边缘检测
Canny边缘检测也是一种边缘检测方法,本文介绍了Canny边缘检测的函数及其使用方法,并利用emgucv方法将轮廓检测解算的结果与原文进行比较. 图像的边缘检测的原理是检测出图像中所有灰度值变化较大 ...
- ###Canny边缘检测算子
开源中国. #@date: 2014-06-20 #@author: gerui #@email: forgerui@gmail.com 一.一阶微分边缘算子 1. 一阶微分边缘检测算子也称梯度边缘算 ...
- openCV(四)---Canny边缘检测
图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘. 直接上代码,函数简介都在代码注释中 //canny边缘检测 -(void) ...
- Canny边缘检测算法的实现
图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波.我们知道微分运算是求信号的变化率,具有加强高频分量的作用.在空域运算中来说,对图像的锐化就是计算微分.由于数字图像的离散信号, ...
- 一些关于Canny边缘检测算法的改进
传统的Canny边缘检测算法是一种有效而又相对简单的算法,可以得到很好的结果(可以参考上一篇Canny边缘检测算法的实现).但是Canny算法本身也有一些缺陷,可以有改进的地方. 1. Canny边缘 ...
随机推荐
- ios--->NStimer用法
NStimer用法 1.初始化 (NSTimer *)timerWithTimeInterval:(NSTimeInterval)ti target:(id)aTarget selector:(SEL ...
- php--->底层的运行机制与数据结构原理
PHP 底层的运行机制与数据结构原理 1. PHP的设计理念及特点 多进程模型:由于PHP是多进程模型,不同请求间互不干涉,这样保证了一个请求挂掉不会对全盘服务造成影响,当然,随着时代发展,PHP也早 ...
- 004-OSI参考模型和分层思想
OSI参考模型 应用层 所有能产生网络流量的程序 表示层 在传输之前是否进行加密或者压缩处理 涉及安全问题 会话层 Session 是建立在传输层之上,利用传输层提供的服务,使应用建立和维持会话,并能 ...
- selenium8中元素定位方式
Selenium对网页的控制是基于各种前端元素的,在使用过程中,对于元素的定位是基础,只有准去抓取到对应元素才能进行后续的自动化控制,我在这里将对各种元素定位方式进行总结归纳一下. 这里将统一使用百度 ...
- SASS用法入门
本文参考了 阮一峰 老师对 SASS 用法的讲解. 学过 CSS 的人都知道,它不是一种编程语言,在日常的开发中,经常要写大量的 css 代码,有很多的重复代码,效率很低.Sass 是一个 CSS 的 ...
- python中Threadlocal变量
在多线程环境下,每个线程都有自己的数据.一个线程使用自己的局部变量比使用全局变量好,因为局部变量只有线程自己能看见,不会影响其他线程,而全局变量的修改必须加锁. 不加锁就会出现变量会被修改的问题,进而 ...
- 时序数据库 Apache-IoTDB 源码解析之系统架构(二)
上一章聊到时序数据是什么样,物联网行业中的时序数据的特点:存量数据大.新增数据多(采集频率高.设备量多).详情请见: 时序数据库 Apache-IoTDB 源码解析之前言(一) 打一波广告,欢迎大家访 ...
- latex使用总结
1 输入双引号以及单引号: 双引号:按两下 Tab键上方的键, 再按两下单引号键. 单引号:按一下Tab键上方的键,再按一下单引号键. 原文地址 2 时间复杂度的O写法: $\mathcal{O}$ ...
- POJ_2941_矩阵
题目描述: 每组数据给定一个n*n的矩阵,选定不同行不同列的n个元素,求和,若所有选法所产生的和相等,则输出 homogeneous,否则输出not homogeneous. 描述: 数据挺大,爆搜肯 ...
- HDU_1455_dfs
http://acm.hdu.edu.cn/showproblem.php?pid=1455 int dfs(int all,int sum,int now),all代表剩余总长,sum,代表每段长, ...