Resnet——深度残差网络(二)
基于上一篇resnet网络结构进行实战。
再来贴一下resnet的基本结构方便与代码进行对比
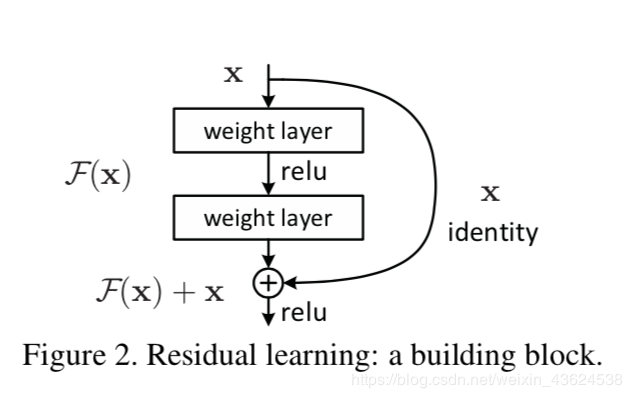
resnet的自定义类如下:
import tensorflow as tf
from tensorflow import keras class BasicBlock(keras.layers.Layer): # filter_num指定通道数,stride指定步长
def __init__(self,filter_num,stride=1):
super(BasicBlock, self).__init__() # 注意padding=same并不总使得输入维度等于输出维度,而是对不同的步长有不同的策略,使得滑动更加完整
self.conv1 = keras.layers.Conv2D(filter_num,(3,3),strides=stride,padding='same')
self.bn1 = keras.layers.BatchNormalization()
self.relu = keras.layers.Activation('relu') self.conv2 = keras.layers.Conv2D(filter_num,(3,3),strides=1,padding='same')
self.bn2 = keras.layers.BatchNormalization() if stride!=1:
self.dowmsample = keras.Sequential()
self.dowmsample.add(keras.layers.Conv2D(filter_num,(1,1),strides=stride))
else:
self.dowmsample = lambda x:x def call(self, inputs, training=None): out = self.conv1(inputs)
out = self.bn1(out)
out = self.relu(out) out = self.conv2(out)
out = self.bn2(out) identity = self.dowmsample(inputs) output = keras.layers.add([out,identity])
output = tf.nn.relu(output) return output class ResNet(keras.Model): # resnet基本结构为[2,2,2,2],即分为四个部分,每个部分又分两个小部分
def __init__(self,layer_dims,num_classes=100):
super(ResNet,self).__init__() # 预处理层
self.stem = keras.Sequential([
keras.layers.Conv2D(64,(3,3),strides=(1,1)),
keras.layers.BatchNormalization(),
keras.layers.Activation('relu'),
keras.layers.MaxPool2D(pool_size=(2,2),strides=(1,1),padding='same')
]) self.layer1 = self.build_resblock(64,layer_dims[0])
self.layer2 = self.build_resblock(128, layer_dims[1], stride=2)
self.layer3 = self.build_resblock(256, layer_dims[2], stride=2)
self.layer4 = self.build_resblock(512, layer_dims[3], stride=2) # 自适应输出,方便送入全连层进行分类
self.avgpool = keras.layers.GlobalAveragePooling2D()
self.fc = keras.layers.Dense(num_classes) def call(self, inputs, training=None):
x = self.stem(inputs) x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x) x = self.avgpool(x)
x = self.fc(x) return x def build_resblock(self,filter_num,blocks,stride=1):
res_blocks = keras.Sequential();
res_blocks.add(BasicBlock(filter_num,stride)) for _ in range(1,blocks):
res_blocks.add(BasicBlock(filter_num,1)) return res_blocks def resnet18():
return ResNet([2,2,2,2])
训练过程如下:
import tensorflow as tf
from tensorflow import keras
import os
from resnet import resnet18 os.environ['TF_CPP_MIN_LOG'] = '' def preprocess(x,y):
x = 2*tf.cast(x,dtype=tf.float32)/255.-1
y = tf.cast(y,dtype=tf.int32)
return x,y (x,y),(x_test,y_test) = keras.datasets.cifar100.load_data()
y = tf.squeeze(y,axis=1)
y_test = tf.squeeze(y_test,axis=1)
print(x.shape,y.shape,x_test.shape,y_test.shape) train_db = tf.data.Dataset.from_tensor_slices((x,y))
train_db = train_db.shuffle(1000).map(preprocess).batch(64) test_db = tf.data.Dataset.from_tensor_slices((x_test,y_test))
test_db = train_db.map(preprocess).batch(64) def main():
model = resnet18()
model.build(input_shape=(None,32,32,3))
optimizer = keras.optimizers.Adam(lr=1e-3)
model.summary() for epoch in range(50):
for step,(x,y) in enumerate(train_db):
with tf.GradientTape() as tape:
logits = model(x)
y_onehot = tf.one_hot(y,depth=10)
loss = tf.losses.categorical_crossentropy(y_onehot,logits,from_logits=True)
loss = tf.reduce_mean(loss) gradient = tape.gradient(loss,model.trainable_variables)
optimizer.apply_gradients(zip(gradient,model.trainable_variables)) if step % 100 == 0:
print(epoch,step,'loss:',float(loss)) total_num = 0
total_correct = 0
for x,y in test_db:
logits = model(x)
prob = tf.nn.softmax(logits,axis=1)
pred = tf.argmax(prob,axis=1)
pred = tf.cast(pred,dtype=tf.int32) correct = tf.cast(tf.equal(pred,y),dtype=tf.int32)
correct = tf.reduce_sum(correct) total_num += x.shape[0]
total_correct += correct
acc = total_correct/total_num print("acc:",acc) if __name__ == '__main__':
main()
打印网络结构和参数量如下:

Resnet——深度残差网络(二)的更多相关文章
- Resnet——深度残差网络(一)
我们都知道随着神经网络深度的加深,训练过程中会很容易产生误差的积累,从而出现梯度爆炸和梯度消散的问题,这是由于随着网络层数的增多,在网络中反向传播的梯度会随着连乘变得不稳定(特别大或特别小),出现最多 ...
- 使用dlib中的深度残差网络(ResNet)实现实时人脸识别
opencv中提供的基于haar特征级联进行人脸检测的方法效果非常不好,本文使用dlib中提供的人脸检测方法(使用HOG特征或卷积神经网方法),并使用提供的深度残差网络(ResNet)实现实时人脸识别 ...
- 深度残差网络(DRN)ResNet网络原理
一说起“深度学习”,自然就联想到它非常显著的特点“深.深.深”(重要的事说三遍),通过很深层次的网络实现准确率非常高的图像识别.语音识别等能力.因此,我们自然很容易就想到:深的网络一般会比浅的网络效果 ...
- Dual Path Networks(DPN)——一种结合了ResNet和DenseNet优势的新型卷积网络结构。深度残差网络通过残差旁支通路再利用特征,但残差通道不善于探索新特征。密集连接网络通过密集连接通路探索新特征,但有高冗余度。
如何评价Dual Path Networks(DPN)? 论文链接:https://arxiv.org/pdf/1707.01629v1.pdf在ImagNet-1k数据集上,浅DPN超过了最好的Re ...
- CNN卷积神经网络_深度残差网络 ResNet——解决神经网络过深反而引起误差增加的根本问题,Highway NetWork 则允许保留一定比例的原始输入 x。(这种思想在inception模型也有,例如卷积是concat并行,而不是串行)这样前面一层的信息,有一定比例可以不经过矩阵乘法和非线性变换,直接传输到下一层,仿佛一条信息高速公路,因此得名Highway Network
from:https://blog.csdn.net/diamonjoy_zone/article/details/70904212 环境:Win8.1 TensorFlow1.0.1 软件:Anac ...
- 关于深度残差网络(Deep residual network, ResNet)
题外话: From <白话深度学习与TensorFlow> 深度残差网络: 深度残差网络的设计就是为了克服这种由于网络深度加深而产生的学习效率变低,准确率无法有效提升的问题(也称为网络退化 ...
- 深度残差网络(ResNet)
引言 对于传统的深度学习网络应用来说,网络越深,所能学到的东西越多.当然收敛速度也就越慢,训练时间越长,然而深度到了一定程度之后就会发现越往深学习率越低的情况,甚至在一些场景下,网络层数越深反而降低了 ...
- 深度残差网络——ResNet学习笔记
深度残差网络—ResNet总结 写于:2019.03.15—大连理工大学 论文名称:Deep Residual Learning for Image Recognition 作者:微软亚洲研究院的何凯 ...
- ResNet(深度残差网络)
注:平原改为简单堆叠网络 一般x是恒等映射,当x与fx尺寸不同的时候,w作用就是将x变成和fx尺寸相同. 过程: 先用w将x进行恒等映射.扩维映射或者降维映射d得到wx.(没有参数,不需要优化器训练) ...
随机推荐
- python下的selenium和chrome driver的安装
selenium是一款支持多种语言.多种浏览器.多个平台的开源web自动化测试软件,测试人员可用python.java等语言编写自动化脚本,使得浏览器可以完全按照你的指令运行,大大节省了测试人员用鼠标 ...
- CUDA学习(三)之使用GPU进行两个数组相加
传入两个数组,在GPU中将两个数组对应索引位置相加 #include "cuda_runtime.h" #include "device_launch_parameter ...
- react脚手架搭建命令 react常用库
react项目一般需要的组件库 react-redux 状态管理库 react-router-dom 路由 sass /less style-compon ...
- 在Mysql中,事务是如何实现的呢?
hello大家好,我是一个爱看底层的小码,对于每一个学习mysql数据库的同学来说,事务都是一个绕不开的话题,简单的说来事务是指访问并可能更新数据库中各项数据项的一个程序执行单元.事务的四个特征无非就 ...
- python中线程共享资源问题的解决
线程跟进程有些相似,有时被称作轻量级的进程,但不同的是,所有的线程运行在同一个进程中,共享相同的运行坏境. 进程和线程都是实现多任务的一种方式,例如:在同一台计算机上能同时运行多个QQ(进程),一个Q ...
- JavaScript 初学者容易犯的几个错误,你中招没?
JavaScript 是对初学者比较友好的一门编程语言,基本上花个半小时看下语法就能写出能运行的代码.JavaScript 是动态脚本语言,对数据类型没有太多的限制,写起来非常灵活.但正因为如此,初学 ...
- css实现渐变字体和流光字体
这是段渐变文本 .text{ font-size: 30px; font-weight: bold; background-image: linear-gradient(#ed3f27, #9b099 ...
- tensorflow variable scope 变量命名空间和变量共享
import tensorflow as tf def f(): var = tf.Variable(initial_value=tf.random_normal(shape=[2])) return ...
- HDU_3415_单调队列
http://acm.hdu.edu.cn/showproblem.php?pid=3415 初探单调队列,需要注意的是每次i维护的是i-1. #include<iostream> #in ...
- centos7 手把手从零搭建深度学习环境 (以TensorFlow2.0为例)
目录 一. 搭建一套自己的深度学习平台 二. 安装系统 三. 安装NVIDA组件 四. 安装深度学习框架 TensorFlow 五. 配置远程访问 六. 验收 七. 福利(救命稻草