CAN总线要点
前言
CAN总线的应用在现在看来越来越广泛,我厂设备从最初的ARM9与ARM7平台、期间升级过度到CortexA8与Cortex M3平台,再到现在的Cortex M4平台,围绕CAN进行了一系列产品的开发,CAN总线的稳定性是毋庸置疑的。
CAN总线物理结构与特性
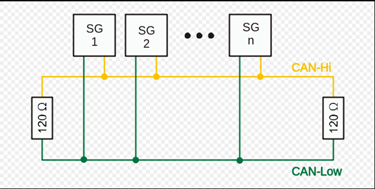
CAN总线网络
CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻,但是为什么是120欧姆呢?那是因为电缆的特性阻抗为120欧。
CAN收发器
CAN收发器的作用是负责逻辑电平和信号电平之间的转换。
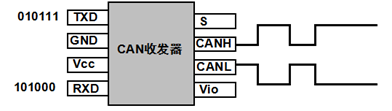
即从CAN控制芯片输出逻辑电平到CAN收发器,然后经过CAN收发器内部转换将逻辑电平转换为差分信号输出到CAN总线上,CAN总线上的节点都可以决定自己是否需要总线上的数据。具体的管教定义如下:
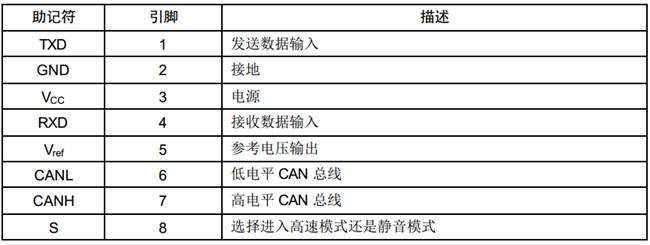
信号表示
CAN总线采用不归零码位填充技术,也就是说CAN总线上的信号有两种不同的信号状态,分别是显性的(Dominant)逻辑0和隐形的(recessive)逻辑1,信号每一次传输完后不需要返回到逻辑0(显性)的电平。
位填充规则:发送器只要检测到位流里有5个连续相同值的位,便自动在位流里插入补充位。
观察下图:
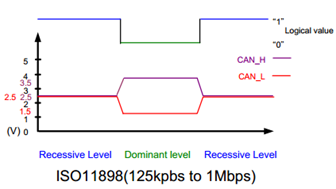
可以看到上图中的当第一段为隐性(recessive),CAN_H和CAN_L电平几乎一样,也就是说CAN_H和CAN_L电平很接近甚至相等的时候,总线表现隐性的,而两线点位差较大时表现为显性的,按照定义的:
- CAN_H-CAN_L < 0.5V 时候为隐性的,逻辑信号表现为"逻辑1"- 高电平。
- CAN_H-CAN_L > 0.9V 时候为显性的,逻辑信号表现为"逻辑0"- 低电平。
下面将差分信号和显隐性之间对应关系总结为下表:
|
状态 |
逻辑信号 |
电压范围 |
|
显性Dominant |
0 |
CAN_H-CAN_L > 0.9 |
|
隐性recessive |
1 |
CAN_H-CAN_L < 0.5 |
由上面的分析我们可以知道:
CAN总线采用的"线与"的规则进行总线冲裁。即1&0=0;所以0为显性。
这句话隐含的意思是,如果总线上只要有一个节点将总线拉到低电平(逻辑0)即显性状态,总线就为低电平(逻辑0)即显性状态而不管总线上有多少节点处于传输隐性状态(高电平或是逻辑1),只有所有节点都为高(隐性),总线才为高,即隐性。
通讯速率与通讯距离
下面的SAE J2411为美国汽车标准。
|
类型 |
标准 |
最高速率 |
描述 |
|
高速CAN |
CAN/ISO 11839-2 |
1Mbit/秒 |
最通用的CAN总线类型 |
|
低速CAN |
ISO/ISO 11839-3 |
125Kbit/秒 |
容错,在一条总线短路的时候仍然能工作 |
|
单线CAN |
SAE J2411 |
50Kbit/秒 |
高速模式可达到100Kbit/s主要用在汽车上,例如通用公司 |
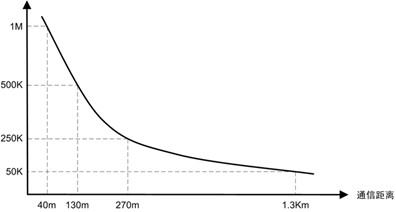
CAN总线上任意两个节点的最大传输距离与其位速率有关,如下表:
|
位速率/kbps |
1000 |
500 |
250 |
125 |
100 |
50 |
20 |
10 |
5 |
|
最大距离/m |
40 |
130 |
270 |
530 |
620 |
1300 |
3300 |
6700 |
10000 |
这里的最大通信距离指的是同一条总线上两个节点之间的距离。可以看到速率越低通讯距离就越远,也就是说CAN总线的通讯距离和波特率成反比。在位速率为5千比特位每秒的时候达到最大的传输距离10公里。其中一般的工程中比较常用的为500K每秒的通讯速率。这个速率在实际测试的时候也是非常可靠的。
如果想要更远的传输(大于10公里);可以考虑用多个CAN控制器连接或是加其他通讯协议(如485或是TCP/IP)的接口芯片组成的一个设备,这样就可实现长距离的通讯需求。
CAN总线关键概念
仲裁
只要总线空闲,总线上任何节点都可以发送报文,如果有两个或两个以上的节点开始传送报文,那么就会存在总线访问冲突的可能。但是CAN使用了标识符的逐位仲裁方法可以解决这个问题。
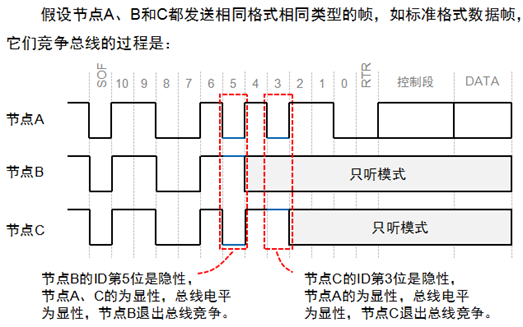
在仲裁期间,每一个发送器都对发送的电平与被监控的总线电平进行比较。如果电平相同,则这个单元可以继续发送。如果发送的是一"隐性"电平而监视到的是一"显性"电平,那么这个节点失去了仲裁,必须退出发送状态。如果出现不匹配的位不是在仲裁期间则产生错误事件。
帧ID越小,优先级越高。由于数据帧的RTR位为显性电平,远程帧为隐性电平,所以帧格式和帧ID相同的情况下,数据帧优先于远程帧;由于标准帧的IDE位为显性电平,扩展帧的IDE位为隐形电平,对于前11位ID相同的标准帧和扩展帧,标准帧优先级比扩展帧高。
CAN总线协议
CAN 总线是一个广播类型的总线,所以任何在总线上的节点都可以监听总线上传输的数据。也就是说总线上的传输不是点到点的,而是一点对多点的传输,这里多点的意思是总线上所有的节点。但是总线上的节点如何知道那些数据是传送给自己的呢?CAN总线的硬件芯片提供了一种叫做本地过滤的功能,通过这种本地过滤的功能可以过滤掉一些和自己无关的数据,而保留一些和自己有关的信息。
CAN消息机制
CAN标准定义了四种消息类型,每条消息用一种叫做比特位仲裁(Arbitration)机制来控制进入CAN总线,并且每条消息都标记了优先权。另外CAN标准还定义了一系列的错误处理机制。
CAN报文的四种消息类型:
- 数据帧:数据帧将数据从发送器传输到接收器。
- 远程帧:总线单元发出远程帧,请求发送具有同一标识符的数据帧。
- 错误帧:任何单元检测到总线错误就发出错误帧。
- 过载帧:过载帧用在相邻数据帧或远程帧之间的提供附加的延时。
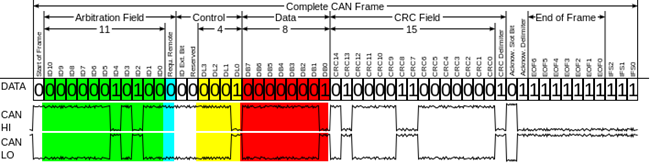
数据帧
下图为基本的格式:
CAN总线中有标准帧和扩展帧两种格式,两种格式不同的地方在于仲裁域格式的不同,看下面两个表格可以很清楚的看出两者的不同,下面第一个表是标准帧(CAN2.0 A),第二个为扩展帧(CAN2.0 B):
下面为扩展帧格式(CAN2.0B):
其中
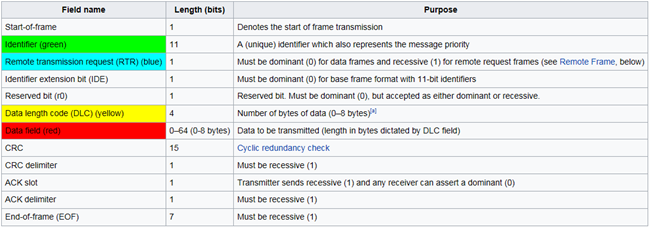
- SOF为帧开始
- SRR为"替代远程请求位
- IDE为扩展标识符位
- RTR为远程传输请求位
- CRC delimiter 为CRC定界符。
- ACK delimiter 为应答定界符.
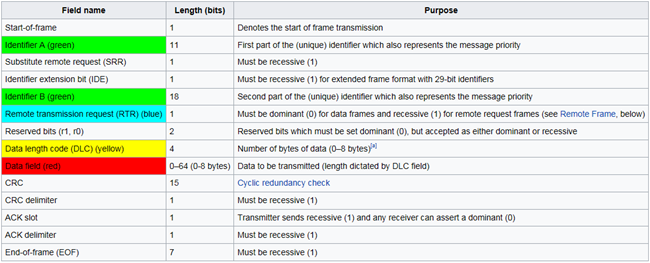
我们看到上图中的基本帧格式可以总结为以下几个域:
|
域 |
描述 |
|
仲裁域 |
仲裁域决定了当总线上两个或是多个节点争夺总线时的优先权。 |
|
数据域 |
包含了0到8字节的数据。 |
|
CRC域 |
包含了15位的校验和,校验和用来做错误检测。 |
|
应答槽 |
任何一个已经正确接收到消息的控制器在每一条消息的末端发送一个应答位,发送器检查消息是否存在应答位,如果没有就重发消息。 |
远程帧
作为数据接收器的站,通过发送远程帧,可以启动其资源节点传送它们各自的数据。远程帧和数据帧非常类似,只是远程帧没有数据域。
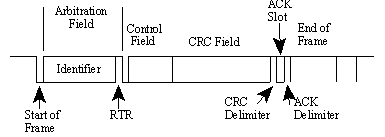
上图就是远程帧的帧格式,它相对与数据帧没有远程帧,但是要注意发送远程帧的时候RTR位要置1,表示发送的是远程帧。下图更加清晰了呈现了这种结构。


错误帧
错误帧是当总线的某一个节点检测到错误后发送出来的,它会引起所有节点检测到一个错误,所以当有任何一个节点检测到错误,总线上的其他节点也会发出错误帧。CAN总线设计了一套详尽的错误计数机制来确保不会由于任何一个节点反复的发送错误帧而导致CAN总线的崩溃。
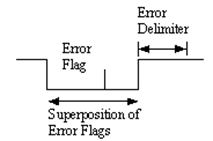
如上图所示错误标志和错误定界符组成,高低代表分别代表隐性和显性,其中错误标志为所有节点发过来的错误标志的叠加(Superposition)。下图更为清楚的看出各个数据位的分布:

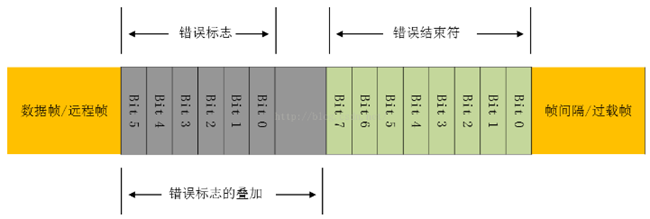
下面通过以下数据结构框图概括各个部分的定义:
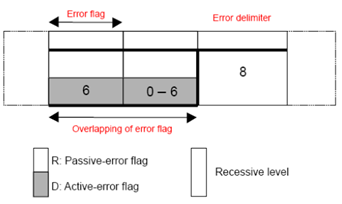
错误标志有两种形式:
- 主动错误标志,它由6个连续的显性位0组成,它是节点主动发送的错误标志。
- 被动错误标志,它由6个连续的隐性位1组成,除非被其他节点的显性位覆盖。
刚才说到一个节点上检测到错误会导致总线上所有的节点都会检测到错误并发送错误标志,这是为什么呢?
因为单一节点上的错误标志格式违背了从帧起始到CRC界定符的位填充规则,也破坏了ACK域或帧结尾的固定格式。下面简要说下位填充规则。
位填充规则:发送器只要检测到位流里有5个连续相同值的位,便自动在位流里插入补充位。
注意:位填充规则只是针对数据帧和远程帧,错误帧和过载帧格式固定。
所以所有其他的节点会检测到错误条件并且开始发送错误标志,因此错误帧就是各个站的不同错误标志叠加在一起的结果。
当某个节点发送错误帧(带有错误标志),其他节点收到了错误帧,检测到错误条件,就通过发送"被动错误标志"的错误帧来提示错误。
错误定界符:
传送了错误标志以后,每一个站就发送一个隐性位,并一直监视总线直到检测出一个隐性位为止,然后就开始发送其余7个隐性位。
过载帧
过载帧是接收节点用来向发送节点告知自身接收能力的帧。
过载帧,意思就是某个接收节点来不及处理数据了,希望其他节点慢点发送数据帧或者远程帧,所以告诉发送节点,我已经没有能力处理你发送过来的数据了。
过载帧跟错误帧结构类似包括过载标志和过载定界符,有3中情况会引起过载:
- 接收器内部的原因,它需要延迟下一个数据帧或是远程帧。
- 在间歇字段(看下面的帧间空间)的第一位和第二位检测到一个显性位(间歇字段都是隐性位的)
- 如果CAN节点在错误界定符或是过载界定符的第八位(最后一位)采样到一个显性位逻辑0,节点会发送一个过载帧,错误计数器不会增加。

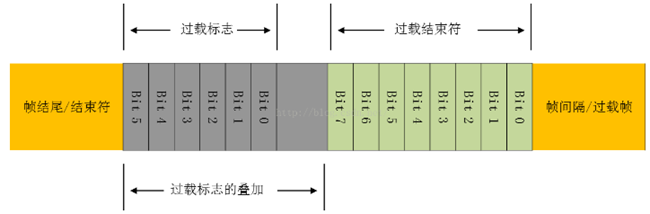
上图中很清晰的表示了过载标志有6个显性位组成,而叠加部分和"主动错误"标志一样,过载的标志破坏的是间歇域的固定格式。所以导致其他的节点都检测到过载条件,并一同发出过载标志。
过载定界符:
也就是上图的过载结束符,过载标志被传送以后,节点就一直监听着总线,直到检测到有一个从显性位到隐性位的跳变为止。当从总线上检测到这样的跳变,则就标志着每一个节点都完成了各自过载标志的发送,并开始同时发送其余7个隐性位。
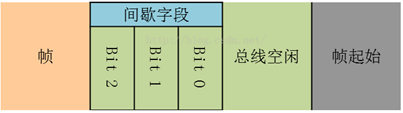
帧间空间(Interframe Space)
帧间空间说白了就是帧与帧之间的间隔,但是这种间隔在CAN的帧中只存在于数据帧和远程帧,其他的帧就不一定是帧间空间隔开的,而是其他形式,或是直接是没有间隔,例如过载帧和错误帧之间就没帧间空间。过个过载帧之间有间隔但是不是有帧间空间隔开的。
这里所说的针间空间包括"间歇"、"总线空闲"的位域。如果是发送前一报文的"被动错误"的站,则还包括叫做"挂起传输"的位域。
若不是"被动错误"的站,或作为前一报文的接收器的站,帧间空间格式为下图:

若是"被动错误"的站,如果想要发送8个隐性电平,在发送其他帧,帧间空间格式为下图,即包括了挂起传输,

可以看到
- 间歇字段有3个隐性位。
特别的在间歇期间,所有的节点都不允许传送数据帧和远程帧,唯一看做的是标示一个过载条件。
- 总线空闲:
只要总线空闲,任何节点就可以往总线发送数据,并且是开始于间歇之后的第一个位。一旦总线上检测到显性位即逻辑"0",可以认为是帧的开始。
- 挂起传输
"被动错误"的节点发送报文之后,在下一个报文开始传送之前或是确认总线空闲之前发出8个隐性位跟随在间歇的后面。如果这个时候有一个报文从其他的节点发过来,则这个节点就成为了接收器。
错误处理机制
错误侦测
下标是几个错误类型:
|
错误类型 |
出错条件 |
出错域 |
帧测单元 |
|
|
比特错误 bit error |
发送的位值与所监控的位值不相符合(填充比特和ACK比特除外) |
数据帧(SOF~EOF) 远程帧(SOF~EOF) 错误帧 过载帧 |
发送单元 接收单元 |
|
|
填充错误stuff error |
侦测到6个连续相同的电平 |
数据帧(SOF~CRC) 远程帧(SOF~CRC) |
发送单元 接收单元 |
|
|
CRC 错误 |
计算结果和接收到的CRC不同 |
数据帧(CRC) 远程帧(CRC) |
接收单元 |
|
|
格式错误 Form Error |
某个固定的格式位置出现无效的比特 |
数据帧: (CRC Delimiter, ACK Delimiter EOF) 远程帧: (CRC Delimiter,ACK Delimiter) 错误帧: (Error Frame Delimiter) 过载帧: (Overload Delimiter) |
接收单元 |
|
|
应答错误 Acknowledgment |
发送端在应答间隙所监视的位不为显性,即逻辑0,发送器就检测到一个应答错误。 |
数据帧(ACK slot) 远程帧(ACK slot) |
发送单元 |
|
错误计数
下面是错误计数表:
|
错误条件 |
Transmit Error Counter |
Receive Error Counter |
|
|
1 |
RECEIVER端侦测到一个位Error错误,除了发送ACTIVE ERROR FLAG 和OVERLOAD FLAG |
- |
+1 |
|
2 |
TRANSMITIER 发送ERROR FLAG |
+8 |
|
|
3 |
TRANSMITTER发送ACTIVE ERROR FLAG OVERFLAG时侦测到BIT ERROR |
+8 |
|
|
4 |
当RECEIVER发送ACTIVE ERROR FLAG或OVERFLAG时侦测到BIT ERROR |
+8 |
|
|
5 |
一个帧被成功发送之后(取得ACK并且知道END OF FRAME完成都没有错误) |
-1 IF TEC=0,TEC will not be changed |
- |
|
6 |
一个帧被成功接收(知道ACK域都没有检测到错误,并成功发送ACK比特) |
- |
1. if 1 <= REC <= 127 -> REC-1 2. if REC = 0 -> REC = 0 3. if REC > 127 -> REC = a value Between 119 to 127 |
|
7 |
在总线上检测到128此连续的11个1,"bus off"的节点允许变成不再是"bus off" |
Cleared to TEC = 0 |
Cleared to REC = 0 |
错误抑制
为防止某些节点自身出错而一直发送错误帧,干扰其他节点通信,CAN协议规定了节点的3种状态及行为,如下图:
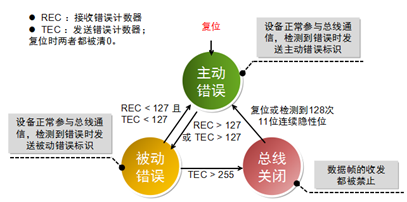
一个节点挂到CAN总线上之后,处于ACTIVE状态;TEC>127或者REC>127导致节点进入passive状态;TEC>255之后节点处于bus off状态,就是不允许再往bus上发送东西了;处于bus off状态的节点,在检测到128个连续的11个1之后将回到active状态。
CAN总线要点的更多相关文章
- 【Android】事件总线(解耦组件) EventBus 详解
当Android项目越来越庞大的时候,应用的各个部件之间的通信变得越来越复杂,例如:当某一条件发生时,应用中有几个部件对这个消息感兴趣,那么我们通常采用的就是观察者模式,使用观察者模式有一个弊病就是部 ...
- 2016.6.20 计算机网络复习要点第三章之CSMA/CD协议
1.最早的以太网是将许多计算机都连接到一根总线上: (1)总线的特点是:当一台计算机发送数据时,总线上的所有计算机都检测到这个数据,这种就是广播通信方式: (2)为了实现在总线上的一对一通信,可以使每 ...
- ADXL345经验总结,采用SPI和I2C总线操作
一. ADXL345简介 ADXL345是ADI公司推出的三轴(x,y,z)iMEMS数字加速度计(digital accelerometer),具有在16G下高分辨率(13Bit)测量能 ...
- VxWorks中的中断应用设计要点
硬件中断处理是实时系统设计中的关键性问题,设计人员有必要对其作深入研究,以更好地满足开发工作需要.文中以VxWorks操作系统为软件平台,讨论了在实时系统中进行中断应用设计时要注意的一些问题.由于软硬 ...
- 【转】STM32 FSMC总线深入研究
原文:http://group.chinaaet.com/116/48112 由于CPU与FPGA通信的需要,以及对8080总线的熟悉,首选采用了STM32的FSMC总线,作为片间通信接口.FSMC能 ...
- 一文看懂汽车电子ECU bootloader工作原理及开发要点
随着半导体技术的不断进步(按照摩尔定律),MCU内部集成的逻辑功能外设越来越多,存储器也越来越大.消费者对于汽车节能(经济和法规对排放的要求)型.舒适性.互联性.安全性(功能安全和信息安全)的要求越来 ...
- Spark2.1.0——深入理解事件总线
Spark2.1.0——深入理解事件总线 概览 Spark程序在运行的过程中,Driver端的很多功能都依赖于事件的传递和处理,而事件总线在这中间发挥着至关重要的纽带作用.事件总线通过异步线程,提高了 ...
- [CISCO] 转载:冲突域与广播域(区别、知识要点)
[CISCO] 转载:冲突域与广播域(区别.知识要点) 1.传统以太网操作(Ethernet Connection Ethernet) 传统共享式以太网的典型代表是总线型以太网.在这种类型的以太网中, ...
- linux平台总线驱动设备模型之点亮LED
这一节里,我们来使用平台驱动设备这一套架构来实现我们之前使用简单的字符设备驱动点亮LED,这里并无实际意义,只是告诉大家如果编写平台总线驱动设备. 问:如何编写平台总线驱动设备这一套架构的设备驱动? ...
随机推荐
- Python3练习题求1000以内所有3和5的倍数的总和
sum = 0 for i in range(1,1000): if i%3 == 0 or i%5 == 0: sum += i print(sum)
- Python3练习题 001:4个数字求不重复的3位数
#Python练习题 001:4个数字求不重复的3位数#方法一import itertoolsres = [][res.append(i[0]*100 + i[1]*10 + i[2]) for i ...
- java对象的四种引用:强引用、软引用、弱引用和虚引用
在JDK1.2之前,创建的对象只有在处于可触及(reachable)的状态下,才能被程序使用.也就是说,若一个对象不被任何变量引用,那么程序就无法再使用这个对象.垃圾回收器一旦发现这些无用对象,就会对 ...
- linux 服务器名 访问 shh免密码登录
以根用户登录,或者登录后切换到根用户,然后在提示符下输入hostname命令,可以看出当前系统的主机名为localhost.localdomain. 更改/etc/sysconfig下的netwo ...
- php变量详解
变量是用于存储信息的"容器". 定义一个变量的语法: $变量名 = 值; 使用变量的例子: <?php $x=5; $y=6; $z=$x+$y; echo $z; ?> ...
- 关于Vue-cli 组件引入CSS样式文件
在 Vue-cli 组件 .vue 文件中引入 css 样式表出错 由于使用Vue-cli后, 引入css 样式表 不需要 多余../../ 之类路径 现在写法也发生了改变 <style ...
- Quartz框架学习(1)—核心层次结构
Quartz框架学习 Quartz(任务调度)框架的核心组件: job:任务.即任务调度行为中所要调度的对象. trigger:触发器.是什么促使了一个任务的调度?当然是时间.这也算事件驱动类型程序. ...
- yml中driver-class-name: com.mysql.jdbc.Driver 解析不到的问题
当在idea中使用springboot的快捷创建方式时,选中了mysql 和jdbc 那么pom文件中会直接有 <dependency> <groupId>mysql</ ...
- CDH 6.0.1 集群搭建 「Before install」
从这一篇文章开始会有三篇文章依次介绍集群搭建 「Before install」 「Process」 「After install」 继上一篇使用 docker 部署单机 CDH 的文章,当我们使用 d ...
- Lodop打印控件设置表格次页偏移
Lodop打印控件有很好的自动分页功能,超文本table表格一页装不下,自动分到第二页,第三页……通常表格之前还会有一些内容,比如标题,制表人名称日期什么的杂七杂八的东西,这种东西会占用一定的空间,这 ...