STM32应用实例八:与多台MS5803压力传感器I2C通讯
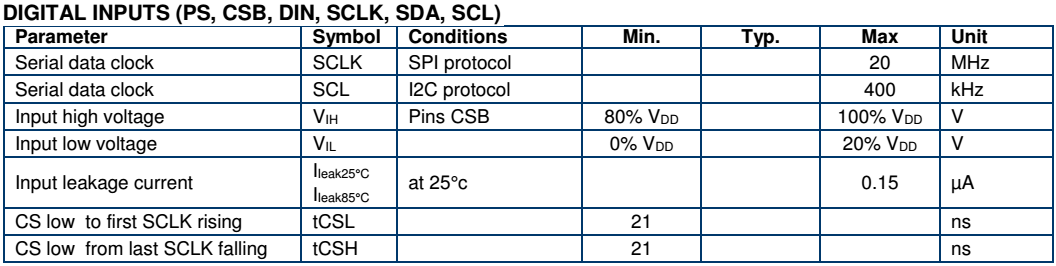
MS5803压力传感器支持SPI和I2C总线通讯,拥有24位AD转换。能够同时获得压力值和温度值,其中压力测量范围为10-1100mbar,温度的测量范围是-40-85摄氏度。各引脚功能及参数如下:
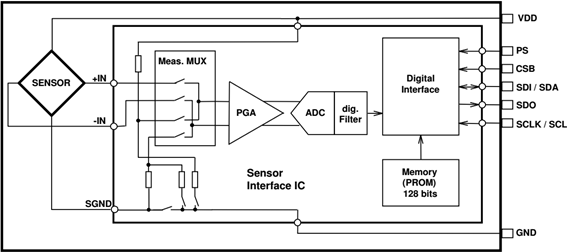
传感器内部结构图如下:
通讯协议的选择通过PS引脚来设置:
|
PS引脚电位 |
通讯模式 |
使用的引脚 |
|
高电平 |
I2C |
SDA, SCL, CSB |
|
低电平 |
SPI |
SDI, SDO, SCLK, CSB |
在SPI模式下,SCLK作为外部输入时钟,SDI作为串行数据输入,支持Mode0和Mode3的时钟极性和相位。传感器的响应数据输出为SDO引脚,片选信号为CSB引脚。界限示意图如下:
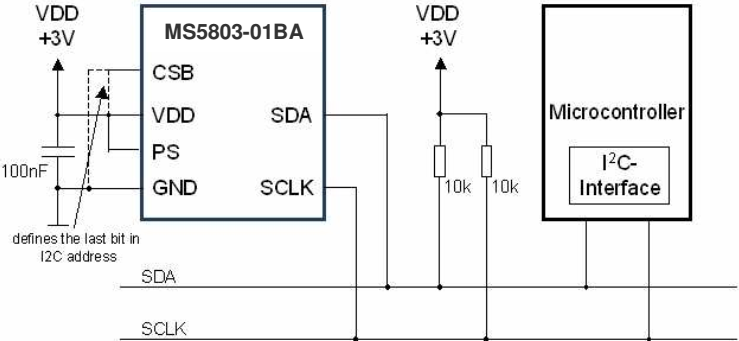
在I2C模式下,SCLK为外部串行时钟输入,SDA位串行数据通讯。CSB引脚作为地只选择,可以链接到VDD或者GND,这也意味着MS5803可以在一条I2C总线接两个设备。在CSP接高电平时,地址为0x76(1110110 b),而CSB接低电平时,地址为0x77 (1110111 b)这个地址是高七位,最后以为有读写命令来决定。实现写命令时,最后一位为0,实现读命令时,最后一位为1。
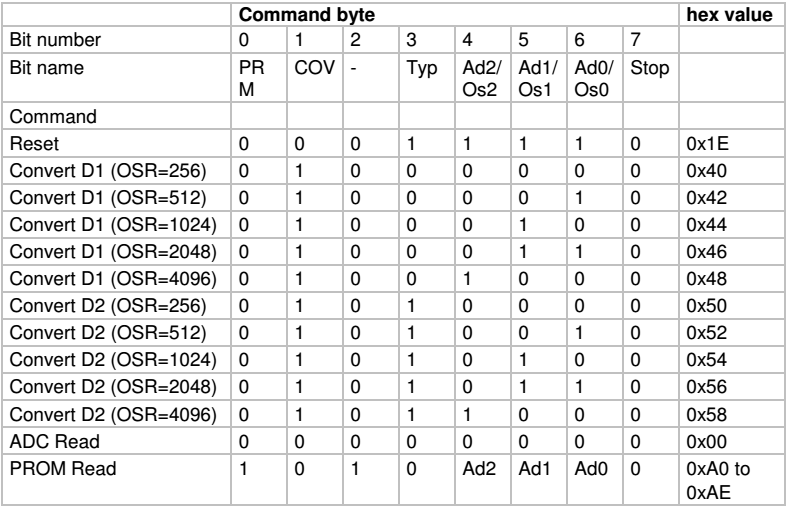
MS5803拥有5个基本命令:复位、读取出厂校准值、数据1转换(压力值数据)、数据2转换(温度值数据)和读取ADC的转换结果。具体分配如下:
因为MS5803的地址位仅有1位是可以设定的,所以一条I2C总线最多只能挂2个MS5803模块。为了让程序具有较好的可移植性,我们在便写程序时不使用对硬件的直接操作,而采用函数指针来操作,所以我们定义了:
/*向MS5803下发指令,指令格式均为1个字节*/
typedef void (*WriteCommandToMS5803Type)(uint8_t deviceAddress,uint8_t command);
/*从MS5803读取多个字节数据的值*/
typedef void (*ReadBytesFromMS5803Type)(uint8_t deviceAddress,uint8_t *pData,uint16_t bytesNum);
以上两个函数指针来实现针对硬件的读写操作。接下来我们开始编写代码。
(1)复位操作
复位操作的数据流如下图所示,只需要发送一条命令就可完成:

/*复位MS5803操作*/
void ResetForMS5803(uint8_t deviceAddress,WriteCommandToMS5803Type WriteCommandToMS5803)
{
uint8_t command=COMMAND_RESET;
/*下发复位命令*/
WriteCommandToMS5803(deviceAddress,command);
}
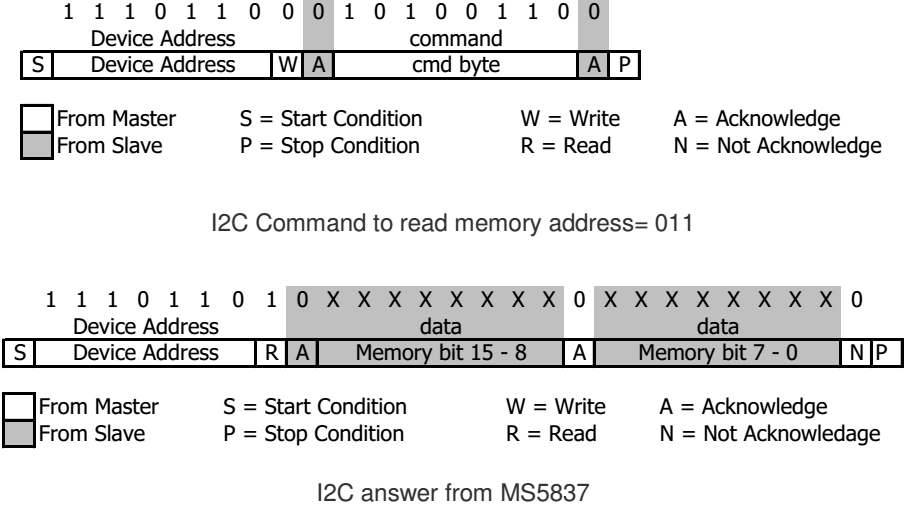
(2)读取校准值
校准值是出厂时厂家校准的各种系数,每台设备都有差异,是固定不变的,只需要一次读取就可以了,共有6个系数,均为16为整数。首先发送读系数的命令,然后读取就可以了,每次读取1个,分6次读取。过程数据流如下图所示:
/*从MS5803的PROM中读取校准数据*/
void GetCalibrationData(uint8_t deviceAddress,uint16_t *caliPara,WriteCommandToMS5803Type WriteCommandToMS5803,ReadBytesFromMS5803Type ReadBytesFromMS5803)
{
/*C1压力灵敏度*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C1,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C2压力补偿值*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C2,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C3压力灵敏度温度系数*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C3,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C4压力补偿温度系数*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C4,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C5参考温度*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C5,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C6温度传感器温度系数*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C6,WriteCommandToMS5803,ReadBytesFromMS5803);
}
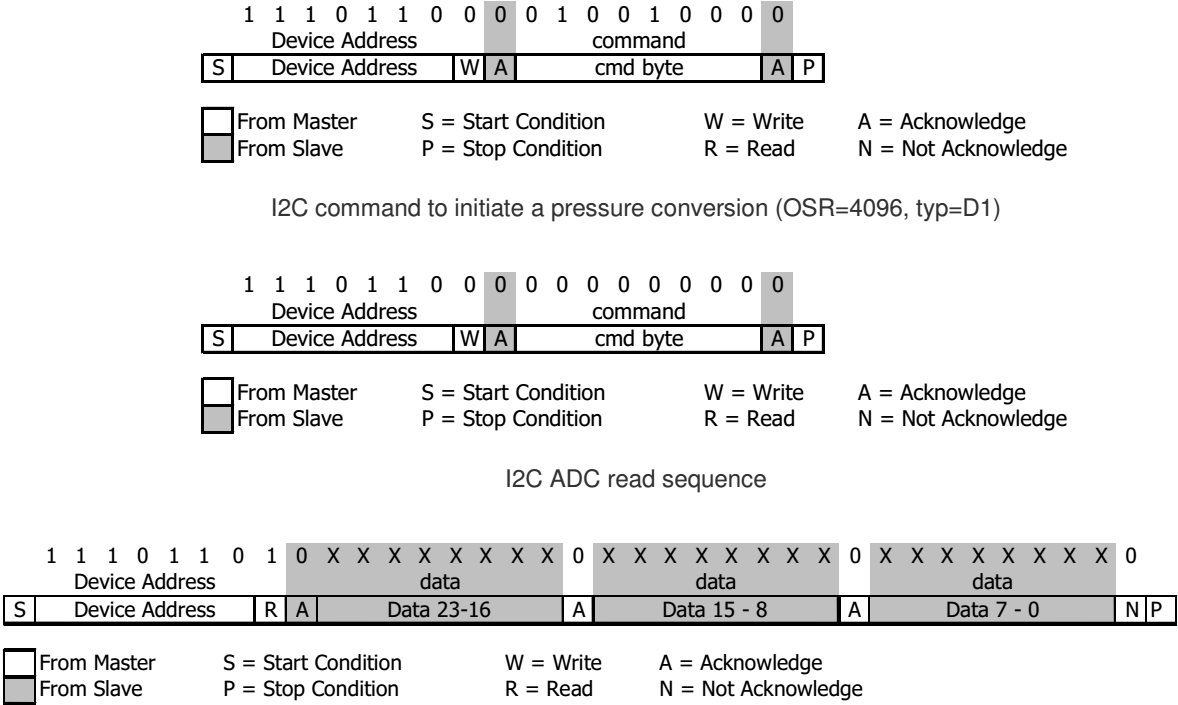
(3)读取转换值
读取转换结果值是我们的目的,可以读取温度和压力两个量,不过一次只能读一个。首先发送命令设定采集压力还是温度,并设定精度。然后发送读取的命令,最后读取对应的值。再使用校准系数计算出最终的物理值。
/*获取转换值,包括温度和压力*/
void GetConversionValue(uint8_t deviceAddress,float *pPres,float *pTemp,uint16_t *caliPara,uint16_t *semaphore,WriteCommandToMS5803Type WriteCommandToMS5803,ReadBytesFromMS5803Type ReadBytesFromMS5803)
{
uint16_t senst1; //C1压力灵敏度
uint16_t offt1; //C2压力补偿值
uint16_t tcs; //C3压力灵敏度温度系数
uint16_t tco; //C4压力补偿温度系数
uint16_t tref; //C5参考温度
uint16_t tempsens; //C6温度传感器温度系数
/*从MS5803的PROM中读取校准数据*/
if(*semaphore>)
{
GetCalibrationData(deviceAddress,caliPara,WriteCommandToMS5803,ReadBytesFromMS5803);
*semaphore=*semaphore-;
}
senst1=caliPara[];
offt1=caliPara[];
tcs=caliPara[];
tco=caliPara[];
tref=caliPara[];
tempsens=caliPara[];
uint32_t digitalPressureValue;
uint32_t digitalTemperatureValue;
/*读取压力数据*/
digitalPressureValue=ReadConversionFromMS5803(deviceAddress,COMMAND_CONVERTD1OSR4096,WriteCommandToMS5803,ReadBytesFromMS5803);
Delayms();
/*读取温度数据*/
digitalTemperatureValue=ReadConversionFromMS5803(deviceAddress,COMMAND_CONVERTD2OSR4096,WriteCommandToMS5803,ReadBytesFromMS5803);
/*对温度进行一阶修正*/
int32_t dT;
int32_t temp;
dT=digitalTemperatureValue-tref*;
temp=(int32_t)(+dT*tempsens/pow(,));
/*对压力进行一阶修正*/
int64_t off;
int64_t sens;
int32_t pres;
off=(int64_t)(offt1*pow(,)+(tco*dT)/pow(,));
sens=(int64_t)(senst1*pow(,)+(tcs*dT)/pow(,));
pres=(int32_t)((digitalPressureValue*sens/pow(,)-off)/pow(,));
/*对温度和压力进行二阶修正*/
int64_t ti=;
int64_t offi=;
int64_t sensi=;
int64_t off2=;
int64_t sens2=;
if(temp<)
{
ti=(int64_t)(*dT*dT/pow(,));
offi=(int64_t)(*(temp-)*(temp-)/pow(,));
sensi=(int64_t)(*(temp-)*(temp-)/pow(,));
off2=off-offi;
sens2=sens-sensi;
temp=temp-(int32_t)ti;
pres=(int32_t)((digitalPressureValue*sens2/pow(,)-off2)/pow(,));
}
if((-<=temp)&&(temp<=))
{
*pTemp=(float)temp/100.0;
}
if((<=pres)&&(pres<=))
{
*pPres=(float)pres/100.0;
}
}
最终在STM32的I2C接口实现通讯时,实现2个WriteCommandToMS5803Type(uint8_t deviceAddress,uint8_t command);和ReadBytesFromMS5803Type(uint8_t deviceAddress,uint8_t *pData,uint16_t bytesNum);函数并调用就可以了,换做其他的平台也只需要重写这两个函数就能实现通讯了。
STM32应用实例八:与多台MS5803压力传感器I2C通讯的更多相关文章
- STM32应用实例七:与宇电设备实现AI-BUS通讯
宇电的设备使用基于RS-485的自定义协议,协议本身比较简单,只有2条指令: 读:地址代号+52H(82) +要读的参数代号+0+0+校验码 写:地址代号+43H(67)+要写的参数代号+写入数低字节 ...
- 【转载】stm32的GPIO八种工作模式
一.推挽输出:可以输出高.低电平,连接数字器件:推挽结构一般是指两个三极管分别受两个互补信号的控制,总是在一个三极管导通的时候另一个截止.高低电平由IC的电源决定. 推挽电路是两个参数 ...
- C语言库函数大全及应用实例八
原文:C语言库函数大全及应用实例八 [编程资料]C语言库函数大全及应用实例八 函数名: kbhit 功 能: 检查 ...
- STM32应用实例十:简析STM32 I2C通讯死锁问题
I2C接口是一种使用非常普遍的MCU与外部设备的接口方式,在STM32中也集成了I2C接口,我们也常常使用它来与外围的传感器等设备通讯. 最近在我们使用STM32F1VET6读取压力和温湿度传感器数据 ...
- STM32应用实例六:与MS5837压力传感器的I2C通讯
MS5837压力传感器是一种可用于电路板上,适用于检测10-1200mbar压力范围的传感器,灵敏度非常高,理论上能够检测到0.01mbar的压力变化,实际使用过程中测试并无明显的变化. MS5837 ...
- 两台电脑使用ROS通讯
一.ROS分布式多机通讯简介 ROS是一种分布式软件框架,节点之间通过松耦合的方式组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic,Service通信. 但是各个节点只能共同拥有 ...
- stm32 IO口八种模式区别
初学STM32,遇到I/O口八种模式的介绍,网上查了一下资料,下面简明写出这几种模式的区别,有不对的地方请大家多多指正! 上拉输入模式:区别在于没有输入信号的时候默认输入高电平(因为有弱上拉).下拉输 ...
- XAML实例教程系列 - XAML传递参数到值转换类实例 八
Kevin Fan分享开发经验,记录开发点滴 XAML实例教程系列 - XAML传递参数到值转换类实例 2012-06-28 05:25 by jv9, 508 阅读, 0 评论, 收藏, 编辑 继上 ...
- eureka多实例,模拟多台机器
本文只有一个eureka server项目,运行在不同的端口,模拟两台eureka服务.开发使用eclipse 4.8 先说pom.xml文件,如果出现问题,首先考虑springboot和其他包版本冲 ...
随机推荐
- 2018.9青岛网络预选赛(A)
传送门:Problem A https://www.cnblogs.com/violet-acmer/p/9664805.html 题意: 求m个PERFECTs中最多有多少个连续的PERFECT和最 ...
- springCloud相关推荐
最近看到微服务很火,也是未来的趋势 所以就去学习下,在dubbo和spring cloud之间我选择了从spring cloud,主要有如下几种原因: dubbo主要专注于微服务中的一个环节--服务治 ...
- Hbase记录-Hbase shell使用命令
1.进入hbase shell 执行./bin/hbase shell 2.进入后,help 帮助信息,如可以使用help 'create' 3.创建表:create 'test','cf' 表 ...
- java类的回顾
1.类是某一批对象的抽象,对象才是一个具体的存在的实体,你我他都是人的实例,而不是人的类.2.类可以包含三种最常见的成员:构造器,成员变量,方法3.4.java世界里,属性,如某个类具有age属性,通 ...
- Hibernate or 的用法
转自baidu estrictions.or(Restrictions.like(),Restrictions.or(Restrictions.like,........))里面的or可以无限加的.还 ...
- Mac下IntelliJ IDEA快捷键大全
Mac键盘符号和修饰键说明⌘ Command⇧ Shift⌥ Option⌃ Control↩︎ Return/Enter⌫ Delete⌦ 向前删除键(Fn+Delete)↑ 上箭头↓ 下箭头← 左 ...
- 逆向安全基础之IDA使用简介
转载:http://m.blog.csdn.net/ilnature2008/article/details/54912854 IDA简介 IDA是业界一个功能十分强大的反汇编工具,是安全渗透人员进行 ...
- java操作Hbase
public class Test { public Connection connection; // 用HBaseconfiguration初始化配置信息是会自动加载当前应用的classpath下 ...
- C# 对图片加水印
using System; using System.Collections; using System.Data; using System.Linq; using System.Web; usin ...
- C# http get与post请求方法
public class HttpTools { public static string GetRequest(string url) { HttpWebRequest request = (Htt ...