川崎机器人c#通讯(转)
由于本人在工业自动化行业做机器视觉的工作,所以除了图像处理方面要掌握外,还需要与工业机器人进行通信。最近学习了计算机与川崎机器人的TCP/IP通信,于是在这里记录一下。
除了直接与机器人通信外,有一种方式是通过PLC间接通信,附上我的另一篇文章,讲c#与三菱PLC通信的:C#与三菱PLC通信
首先假设一个简单的应用情况,有一台带相机的工业机器人,需要在机器人移动到某位置时,发出信号,然后视觉系统拍照并处理,最后将返回信号发送回机器人。这个程序就是以这个应用为基础写的。下图是机器人示教器上的程序:移动到P1点后,给计算机发送拍照信号photo=1,然后计算机处理后返回over=1,机器人收到后移动到P2点。
图片2

机器人示教器上面的程序十分简单,然后说明计算机上的程序。
首先是建立计算机与机器人的TCP链接,这里以计算机为客户端,机器人为服务端。
- public void ConnectRobot()//链接tcp
- {
- byte[] data = new byte[1024];
- newclient_Client = new Socket(AddressFamily.InterNetwork, SocketType.Stream, ProtocolType.Tcp);
- string ipadd = "192.168.30.238";//机器人IP地址
- int port = Convert.ToInt32("23");//端口号
- IPEndPoint ie = new IPEndPoint(IPAddress.Parse(ipadd), port);
- try
- {
- newclient_Client.Connect(ie);//建立连接
- Connected_Client = true;//连接标志位
- btnConn.Enabled = false;
- sendToRobot("as\r\n");//建立连接后,首先发送as,则可以通过计算机发送as语言指令
- SetTishi("机器人链接成功...");//显示
- }
- catch (SocketException e)
- {
- SetTishi("连接机器人失败 " + e.Message);
- return;
- }
- <span style="white-space:pre;"> </span>//用于监听机器人是否发送数据
- ThreadStart myThreaddelegate = new ThreadStart(ReceiveMsg);
- myThread_client = new Thread(myThreaddelegate);
- myThread_client.Start();
- }
TCP通信的基本知识不在这里讲,这里要说明的是connect后为什么有一句向机器人发送“as”。在川崎机器人E系列TCP/IP通信手册中,有如下内容:
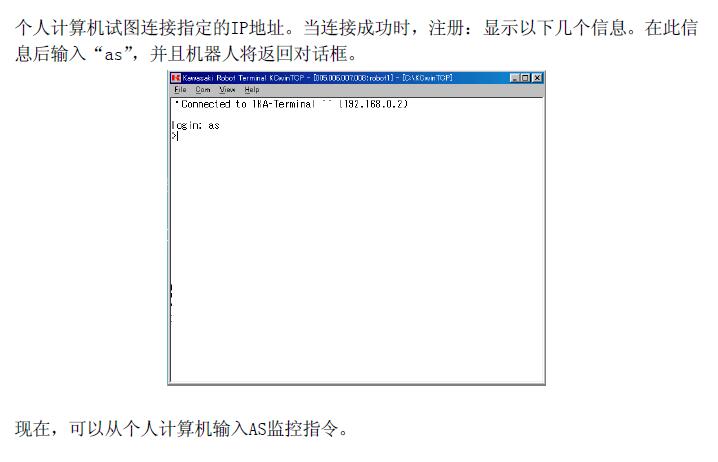
即,在connect后首先向机器人发送"as"后,可以直接从计算机发送机器人的AS语言指令。这样,就可以实现从计算机上对机器人程序进行控制。
建立连接后,要做的就是收发信息了。计算机向机器人发信息很简单,因为计算机可以向机器人发送as语言指令,所以就是简单的TCP发送消息就可以了,如直接发送“over=1”,机器人就可以获取得到了。需要说的是机器人向计算机发送消息,在本程序中没有采用在机器人中建立TCP服务器然后监听的方法,而是在计算机中实现该功能。本方法利用的是川崎机器人as语言中的list指令,list指令的功能是显示所有程序步骤和变量,而要查询变量photo的值,只需要向机器人发送“list/r photo”,这样就可以得到变量photo的值。这样就可以通过计算机端不断查询,达到了机器人发送数据的效果,从而简化了机器人程序,复杂性降低。以下是监听代码:
- public void ReceiveMsg()//监听tcp
- {
- int thelastData = 999;
- while (true)
- {
- try
- {
- byte[] data = new byte[1024];
- int recv = newclient_Client.Receive(data);//接收消息
- string stringdata = Encoding.UTF8.GetString(data, 0, recv);//将bytes转换为字符
- //string stringdata = Encoding.Unicode.GetString(data, 0, recv);
- if (stringdata == "")//判断是否断开连接
- {
- SetTishi("服务器已退出");
- newclient_Client.Close();
- Connected_Client = false;
- break;
- }
- //利用AS语言的检测变量的指令list实现监听功能
- //因为发送‘list/r photo’监测变量photo的值返回的还有其它字符,所以要去掉这些字符
- stringdata = stringdata.Trim();
- string strTemp = "photo =";
- int iCount = stringdata.IndexOf(strTemp);//得到多余字符的长度
- if (iCount > 0)
- {
- string read = stringdata.Substring(strTemp.Length + iCount + 1, 2);//去掉多余字符以及photo
- int kk = int.Parse(read);//得到变量photo的值
- if (kk != 0)
- {
- if (thelastData != kk)//信号从0->1才认为收到信号
- {
- SetTishi("接收到机器人拍照信号...");
- sendToRobot("over=1\r\n");//给机器人完成信号
- SetTishi("接收到消息:" + stringdata);
- }
- }
- thelastData = kk;
- }
- }
- catch
- {
- }
- sendToRobot("list/R photo\r\n");//向机器人发送as语言的指令,查询photo的值
- Thread.Sleep(100);
- }
- }
通过不断向机器人获取变量photo的值,当检测到photo=1时,就可以向机器人发送完成信号over=1,然后机器人程序往下执行。
川崎机器人c#通讯(转)的更多相关文章
- 2016年如果还没有关注这些机器人公司,你就out了
芯师爷语据 知名市场研究机构IDC发布报告称,预计到2019年,全球机器人及相关服务上的投入将达到1350亿美元,较2015年的710亿美元增长近一倍.报告称,机器人相关投资预计将以每年17%的速度增 ...
- PLC与上位机的socket通讯——ABB机器人程序(三)
源程序:https://github.com/935094505/ABB-socket-communication 程序范例 觉得有帮助,别忘了打赏下
- 机器人与机器人仿真技术(zz)
http://www.viblue.com/archives/5587.htm 一.机器人简介: 机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根 ...
- 机器人操作系统(ROS)教程4:ROS的框架【转】
转自:http://www.arduino.cn/thread-11351-1-1.html 在进行ROS的代码开发前,有必要了解一些ROS的概念.首先,ROS的系统代码分为两部分:main和univ ...
- 制作自己的ros机器人(navigaion)前提--22
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 一.要求: 1.大家已经对ROS的基本概念(进程间通讯topic service 数据类型 m ...
- 机器人操作系统ROS | 简介篇
同样,从个人微信公众号Nao(ID:qRobotics)搬运. 前言 先放一个ROS Industrial一周年剪辑视频. ROS已经发布八周年了,在国外科研机构中非常受欢迎.目前,以美国西南研究院为 ...
- 用Python写的一个多线程机器人聊天程序
本人是从事php开发的, 近来想通过php实现即时通讯(兼容windows).后来发现实现起来特别麻烦, 就想到python.听说这家伙在什么地方都能发挥作用.所以想用python来做通讯模块...所 ...
- jenkins 集成钉钉机器人
最早做Jenkins发布完成以后通过邮件发送信息通知相关的联系人,发现邮件会受限于大家接收的设置,导致不能及时的看到相关的发布内容,公司使用钉钉做为公司内部的通讯工具,所以想通过Jenkins发布完成 ...
- 这是一款借助chrome 插件的微信机器人
1.chrome kit微信机器人简介 借助chrome 插件 js注入来实现消息的发送 chrome devtool api的调用来监听https请求 打开微信登录界面,在扫码登录前必须先打开too ...
随机推荐
- 卡特兰数 Catalan 笔记
一.公式 卡特兰数一般公式 令h(0)=1,h(1)=1,catalan数满足递推式.h(n) = h(0)*h(n-1)+h(1)*h(n-2) + ... + h(n-1)h(0) (n>= ...
- Problem C: 找气球
Description zstu集训队经常举办月赛,但是气球经常不够.现有多个桶,每个桶有一种颜色,每个桶可能对应多个题,给定每个题对应的桶,打比赛的时候,经常某道题被发现是水题,但是该颜色的气球没有 ...
- 20172302 《Java软件结构与数据结构》第二周学习总结
2018年学习总结博客总目录:第一周 第二周 教材学习内容总结 第三章 集合概述-栈 3.1 集合 (1) 集合是一种聚集,组织了其他对象的对象.它定义一张破那个特定的方式,可以访问.管理所包含的对象 ...
- webpack 练习笔记
1, 创建项目 webpack mkdir webpack 2, 初始化项目 npm init 3, 全局安装webpack npm install webpack -g 4, 使用 // 创建静态文 ...
- Hadoop学习博客
http://zy19982004.iteye.com/blog/monthblog_more
- IDA Pro Disassembler 6.8.15.413 (Windows, Linux, Mac)
IDA: What's new in 6.8 Highlights This is mainly a maintenance release, so our focus was on fixing b ...
- VC++ 使用attributes定义接口
1.定义预处理命令_ATL_ATTRIBUTES 2.在一个全局的Cpp文件里面配置module的attribute [module(dll, uuid = "{3845951F-15B ...
- 查询返回JSON数据结果集
查询返回JSON数据结果集 设计目标: 1)一次性可以返回N个数据表的JSON数据 2)跨数据库引擎 { "tables": [ { "cols": [ { & ...
- iphone程序适配ipad可以用下面的宏进行尺寸改写
//判断是否为iPad #define ISIPAD [[[UIDevice currentDevice].model substringToIndex:4] isEqualToString:@&qu ...
- (转) Java RandomAccessFile与MappedByteBuffer
RandomAccessFile RandomAccessFile是用来访问那些保存数据记录的文件的,你就可以用seek( )方法来访问记录,并进行读写了.这些记录的大小不必相同:但是其大小和位置必须 ...