stm32与HC-SR04超声波传感器测距
首先,先来看一下这个模块的基本功能和原理。
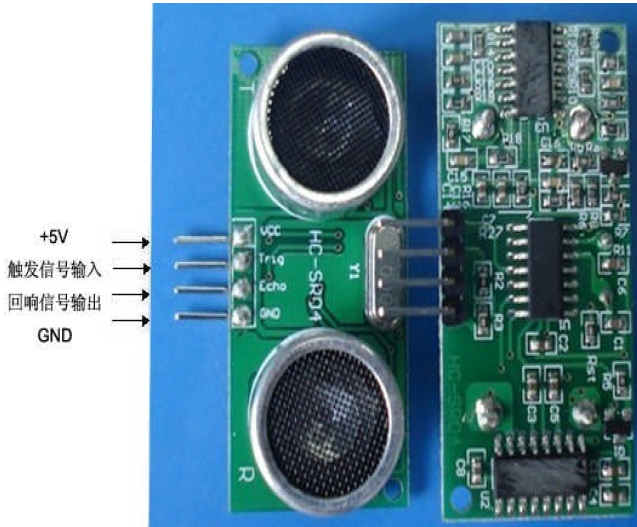
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。像智能小车的测距以及转向,或是一些项目中,常常会用到。智能小车测距可以及时发现前方的障碍物,使智能小车可以及时转向,避开障碍物。
注意是5v输入,但是我用stm32 的3.3v输入也是没有问题的。
二.工作原理
1.给超声波模块接入电源和地。
2.给脉冲触发引脚(trig)输入一个长为20us的高电平方波
3.输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚(echo)端的电平会由0变为1;(此时应该启动定时器计时)
4.当超声波返回被模块接收到时,回波引 脚端的电平会由1变为0;(此时应该停止定时器计数),定时器记下的这个时间即为超声波由发射到返回的总时长。
5.根据声音在空气中的速度为344米/秒,即可计算出所测的距离。
要学习和应用传感器,学会看懂传感器的时序图是很关键的,所以我们来看一下HC-SR04的时序触发图。
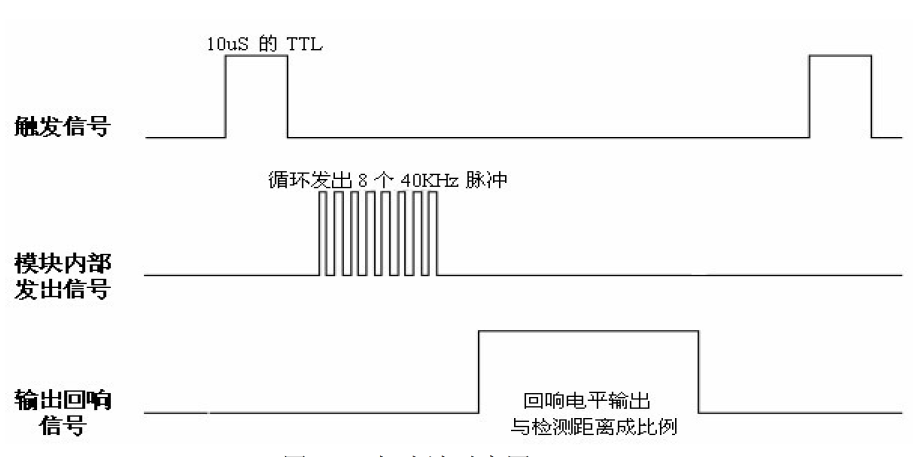
我们来分析一下这个时序图,先由触发信号启动HC-RS04测距模块,也就是说,主机要先发送至少10us的高电平,触发HC-RS04,模块内部发出信号是传感器自动回应的,我们不用去管它。输出回响信号是我们需要关注的。信号输出的高电平就是超声波发出到重新返回接收所用的时间。用定时器,可以把这段时间记录下来,算出距离,别忘了结果要除于2,因为总时间是发送和接收的时间总和。
下面是亲测可用的驱动程序。
芯片型号为stm32f103zet6,超声波测距后通过串口打印到电脑上面。
驱动和测距;
//超声波测距 #include "hcsr04.h" #define HCSR04_PORT GPIOB
#define HCSR04_CLK RCC_APB2Periph_GPIOB
#define HCSR04_TRIG GPIO_Pin_5
#define HCSR04_ECHO GPIO_Pin_6 #define TRIG_Send PBout(5)
#define ECHO_Reci PBin(6) u16 msHcCount = ;//ms计数 void Hcsr04Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //生成用于定时器设置的结构体
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(HCSR04_CLK, ENABLE); //IO初始化
GPIO_InitStructure.GPIO_Pin =HCSR04_TRIG; //发送电平引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);
GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG); GPIO_InitStructure.GPIO_Pin = HCSR04_ECHO; //返回电平引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);
GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO); //定时器初始化 使用基本定时器TIM6
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6, ENABLE); //使能对应RCC时钟
//配置定时器基础结构体
TIM_DeInit(TIM2);
TIM_TimeBaseStructure.TIM_Period = (-); //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到1000为1ms
TIM_TimeBaseStructure.TIM_Prescaler =(-); //设置用来作为TIMx时钟频率除数的预分频值 1M的计数频率 1US计数
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;//不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_ClearFlag(TIM6, TIM_FLAG_Update); //清除更新中断,免得一打开中断立即产生中断
TIM_ITConfig(TIM6,TIM_IT_Update,ENABLE); //打开定时器更新中断
hcsr04_NVIC();
TIM_Cmd(TIM6,DISABLE);
} //tips:static函数的作用域仅限于定义它的源文件内,所以不需要在头文件里声明
static void OpenTimerForHc() //打开定时器
{
TIM_SetCounter(TIM6,);//清除计数
msHcCount = ;
TIM_Cmd(TIM6, ENABLE); //使能TIMx外设
} static void CloseTimerForHc() //关闭定时器
{
TIM_Cmd(TIM6, DISABLE); //使能TIMx外设
} //NVIC配置
void hcsr04_NVIC()
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitStructure.NVIC_IRQChannel = TIM6_IRQn; //选择串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ; //抢占式中断优先级设置为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ; //响应式中断优先级设置为1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断
NVIC_Init(&NVIC_InitStructure);
} //定时器6中断服务程序
void TIM6_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM6, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否
{
TIM_ClearITPendingBit(TIM6, TIM_IT_Update ); //清除TIMx更新中断标志
msHcCount++;
}
} //获取定时器时间
u32 GetEchoTimer(void)
{
u32 t = ;
t = msHcCount*;//得到MS
t += TIM_GetCounter(TIM6);//得到US
TIM6->CNT = ; //将TIM2计数寄存器的计数值清零
Delay_Ms();
return t;
} //一次获取超声波测距数据 两次测距之间需要相隔一段时间,隔断回响信号
//为了消除余震的影响,取五次数据的平均值进行加权滤波。
float Hcsr04GetLength(void )
{
u32 t = ;
int i = ;
float lengthTemp = ;
float sum = ;
while(i!=)
{
TRIG_Send = ; //发送口高电平输出
Delay_Us();
TRIG_Send = ;
while(ECHO_Reci == ); //等待接收口高电平输出
OpenTimerForHc(); //打开定时器
i = i + ;
while(ECHO_Reci == );
CloseTimerForHc(); //关闭定时器
t = GetEchoTimer(); //获取时间,分辨率为1US
lengthTemp = ((float)t/58.0);//cm
sum = lengthTemp + sum ; }
lengthTemp = sum/5.0;
return lengthTemp;
} /*:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
** 函数名称: Delay_Ms_Ms
** 功能描述: 延时1MS (可通过仿真来判断他的准确度)
** 参数描述:time (ms) 注意time<65535
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::*/
void Delay_Ms(uint16_t time) //延时函数
{
uint16_t i,j;
for(i=;i<time;i++)
for(j=;j<;j++);
}
/*:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
** 函数名称: Delay_Ms_Us
** 功能描述: 延时1us (可通过仿真来判断他的准确度)
** 参数描述:time (us) 注意time<65535
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::*/
void Delay_Us(uint16_t time) //延时函数
{
uint16_t i,j;
for(i=;i<time;i++)
for(j=;j<;j++);
}
但是关于USART的函数我就不往上写了,这个简单的串口打印大家应该都会写。下面简单贴一下我的主函数吧。
/*
教训:实验前一定要检查引脚连接是否正确,万不可搞错,不然又要烧坏芯片!!!! */ #include "hcsr04.h"
#include "chao_usart.h" int main()
{ float length; GPIO_cfg();
NVIC_cfg();
USART_cfg();
printf("串口初始化成功!\n"); Hcsr04Init();
printf("超声波初始化成功!\n");//测试程序是否卡在下面两句上面 length = Hcsr04GetLength();
printf("距离为:%.3f\n",length); }
实验结果: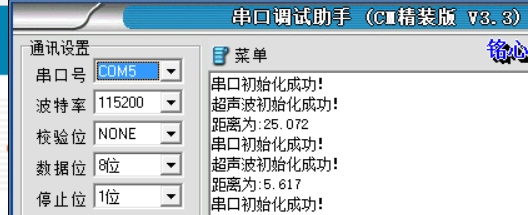
好了,其实这个模块很简单,但是要是把他用的很好的话还是比较困难的,比如用超声波做一个四轴定高的程序,还是有一定的挑战性的。
写这篇博客的目的不仅仅是介绍这个模块的使用,其实这种使用介绍网上一搜一大把,我只是想纪录一下,我在做这个模块的时候遇到的一些其他的问题。
其中有一个小插曲,就是当吧写好的程序烧进去之后,运行时总是出现每次返回一个同样的比正常值小的多的数据,比如说0.034cm,这明显是一个错误的数据,但是刚开始的时候,不知道为什么
总是这样,多次复位从新上电总是这一个数据。让我很是苦恼。但是幸运的是,在这样的情况中间,他又会有时出现一两个正常的的数据,让你有点摸不着头脑。
上网查了一下才慢慢明白,这种现象叫做“余震”,网上关于余震的解释大致有三种:
1、探头的余震。即使是分体式的,发射头工作完后还会继续震一会,这是物理效应,也就是余震。这个余震信号也会向外传播。如果你的设计是发射完毕后立刻切换为接收状态(无盲区),那么这个余震波会通过壳体和周围的空气,直接到达接收头、干扰了检测(注:通常的测距设计里,发射头和接收头的距离很近,在这么短的距离里超声波的检测角度是很大的,可达180度)。
2、壳体的余震。就像敲钟一样,能量仍来自发射头。发射结束后,壳体的余震会直接传导到接收头,当然这个时间很短,但已形成了干扰。另外,在不同的环境温度下,壳体的硬度和外形会有所变化,其余震有时长、有时短、有时干扰大、有时干扰小,这是设计工业级产品时必须要考虑的问题。
3、电路串扰。超声波发射时的瞬间电流很大,例如某种工业级连续测距产品瞬间电流会有15A,通常的产品也能达到1A,瞬间这么大的电流会对电源有一定影响,并干扰接收电路。通过改善电源设计可以缓解这种情况,但在低成本设计中很难根除。所以每次发射完毕,接收电路还需要一段时间稳定工作状态。在此期间,其输出的信号很难使用。
消除上述现象的方法之一就是在检测的时候多次循环检测,取平均值,也就是加权平均滤波,一个简单的滤波处理。就是下面这一段:
int i = ;
float lengthTemp = ;
float sum = ;
while(i!=)
{
TRIG_Send = ; //发送口高电平输出
Delay_Us();
TRIG_Send = ;
while(ECHO_Reci == ); //等待接收口高电平输出
OpenTimerForHc(); //打开定时器
i = i + ;
while(ECHO_Reci == );
CloseTimerForHc(); //关闭定时器
t = GetEchoTimer(); //获取时间,分辨率为1US
lengthTemp = ((float)t/58.0);//cm
sum = lengthTemp + sum ; }
lengthTemp = sum/5.0;
return lengthTemp;
加了这个之后,基本上就没有出现余震现象了。
还有一点就是测试程序前一定要检查引脚有没有接错,不管多有把握,也要看一遍,不然很容易出大事的,一个芯片也许就因为你的大意给GG了。切记,这个应该也算我们这个行业的基本素养吧。
stm32与HC-SR04超声波传感器测距的更多相关文章
- 【雕爷学编程】Arduino动手做(58)---SR04超声波传感器
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的.鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为 ...
- C语言单片机项目实战超声波雷达测距
本实验是基于MSP430利用HC-SR04超声波传感器进行测距,测距范围是3-65cm,讲得到的数据显示在LCD 1602液晶屏上. 模块工作原理如下 (1)采用 IO 触发测距,给至少 10us 的 ...
- 树莓派控制HC-SR04超声波模块测距(新手向+C语言向)
因为作业要求使用c语言代码,这里先附上一段摘自网上的代码 感谢KalaerSun的c语言代码,摘自https://blog.csdn.net/qq_25247589/article/details/6 ...
- 使用超声波传感器HC-SR04检测障碍物
HC-SR04是一种常用的超声波传感器,能够探测2-300厘米范围内的障碍物. 传感器看起来像一个小PCB,前面有两个金属圆柱,背面有一个小电路. 在本文中,我们将提供一个简单的演示来使用HC-SR0 ...
- STM32(HY-SRF05)超声波测距项目
参考资料: https://www.cnblogs.com/qsyll0916/p/6964638.html http://blog.csdn.net/zhangdaxia2/article/deta ...
- stm32的IIc总线--超声波测距
- 关于HC04超声波模块测距的思考(51版)
之前写过一篇HC04的使用文章,当时是使用stm32来实现的,原文链接. 后来又多次使用51来驱动这个模块,有时候有测距需要,使用了几次,总是感觉我上次那个程序不是很好, 所以这次对它进行了改进.虽然 ...
- STM32移植ROS--发布超声波信息
前言:之前ROS跟单片机的底层通讯主要是通过串口自定的协议来做,比如官网提供的arduino串口驱动一样,需要ROS往下发一个指令,单片机再回传一个指令,要写一大堆的协议,这样很麻烦,效率也比较低, ...
- uart 超声波传感器数据读取
传感器选择 淘宝上搜索 US-100 , 价格大概在17块人民币左右. 读取数据的代码如下: // include/aplex_tty.h #ifndef _APLEX_TTY_H__ #define ...
随机推荐
- script & scriptreplay
script是什么 scirpt就是一个命令,可以制作一份记录输出到终端的记录.对于那些想要真实记录终端会话的人来说,这很有用.该记录可以保存并在以后再打印出来. 怎么用 默认情况下,我们可以通过在终 ...
- 研究slatstack时踩过的坑,注意点及解决方案
运行问题 1.直接物理性移除minion或者更换minion原先连接的master,会导致先前的master始终无法ping通minion [root@localhost salt]# salt '* ...
- 【转】C++ map的基本操作和使用
1.map简介 map是一类关联式容器.它的特点是增加和删除节点对迭代器的影响较小,除了那个操作节点,对其它的节点都没有什么影响.对于迭代器来说,可以修改实值,而不能修改key. 2.map的功能 自 ...
- MariaDB基于GTID主从复制及多主复制
一.简单主从模式配置步骤(必须要mysql5.6,此处以maridb10.0.10为例) 1.配置主从节点的服务配置文件 # vim /etc/my.cnf 1.1.配置master节点: [mysq ...
- Android 图片平铺效果
我们大家都看过平铺的效果,那么我们都是怎么样才能实现的那,我们其实主要用到的就是api,我们一开始new一个bitmap,就可以了,但是,大家都没有想过,我们还可以用什么方法来做这个事情那,那么我们就 ...
- js子节点children和childnodes的用法(非原创)
想要获取子节点的数量,有几种办法. childNodes 它会把空的文本节点当成节点, <ul> 文本节点 <li>元素节点</li> 文本节点 <li> ...
- webpack中的output.filename 和output.chunkFilename
filename应该比较好理解,就是对应于entry里面生成出来的文件名.比如: { entry: { "index": "pages/index.jsx" } ...
- MySQL索引底层实现原理
优秀博文: MySQL索引背后的数据结构及算法原理 B树.B-树.B+树.B*树[转],mysql索引 MySQL 和 B 树的那些事 索引的本质 MySQL官方对索引的定义为:索引(Index)是帮 ...
- IntelliJ IDEA 下的SVN使用
最近公司的很多同事开始使用IntelliJ Idea,便尝试了一下,虽然快捷键与eclipse 有些不同,但是强大的搜索功能与“漂亮的界面”(个人认为没有eclipse好看 ),还是值得我们去使用的. ...
- 【HTTP】 Fiddler简介
1.为什么是Fiddler? 抓包工具有很多,小到最常用的web调试工具firebug,达到通用的强大的抓包工具wireshark.为什么使用fiddler?原因如下: a.Firebug虽然可以抓包 ...