相机IMU融合四部曲(一):D-LG-EKF详细解读
相机IMU融合四部曲(一):D-LG-EKF详细解读
极品巧克力
前言
前两篇文章《Google Cardbord的九轴融合算法》,《Madgwick算法详细解读》,讨论的都是在SO3上的传感器融合,即,输出的只是纯旋转的姿态。只有旋转,而没有位移,也就是目前的一些普通的VR盒子的效果。
而《相机IMU融合四部曲》要讨论的是,在SE3上面的传感器融合,在既有旋转又有位移的情况下,该如何对多传感器进行融合。也就是,工程实践中的,如何把基于相机算出来的位姿,与IMU的位姿融合在一起。既有旋转又有位移,可以反映玩家在三维空间中的运动,也就是目前的高端VR的效果,比如HTC Vive,Oculus以及微软的Hololens, MR头盔。




本系列文章分为四篇,分别从理论和实践层面进行详细阐述。
理论部分主要介绍相机和IMU在SE3上的融合,基于误差状态的卡尔曼滤波,IMU的在线标定,松耦合方法,紧耦合方法等。实践部分,则是这些理论的具体实现,在VR中的实际融合效果,以及针对实验结果的改进方案,实践中总结的经验等。
以下为第一篇,我结合参考文献《Discrete extended Kalman filter on lie groups》,对SE3的融合理论进行详细推导,总结成本文,与各位分享。
本文目标读者:传感器融合算法工程师。
一.基础理论
首先,有SE3上的伴随性质,这与《视觉SLAM十四讲》里面的公式4.48一样。伴随性质与BCH近似的目的一样,都是要让相乘的李代数融成一个李代数。
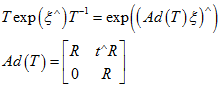
还可以转换成其它的形式。

然后是BCH公式。

另外一个公式。
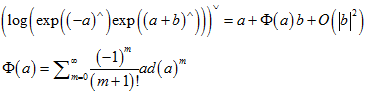
关于 的计算,参考《机器人状态估计》。
的计算,参考《机器人状态估计》。
不过,我觉得,上面这个公式,作者可能写错了,比如,当 很大,而
很大,而 时,代入上式,得到
时,代入上式,得到 ,这样就得到了
,这样就得到了 ,这样就可以进一步得出
,这样就可以进一步得出 ,所以上面的公式是有错误的。
,所以上面的公式是有错误的。
所以,作者想表达的应该是,BCH近似公式。应该写成如下形式,当 和
和 都为小量时,
都为小量时,

然后,假设在均值0附近的李代数满足高斯分布,均值处的李群为 。
。

又因为 ,参考《on-manifold详细解读》,把
,参考《on-manifold详细解读》,把 的中的表示旋转的
的中的表示旋转的 的范围限制住,可以得出
的范围限制住,可以得出 和
和 是一一对应的关系,
是一一对应的关系, ,所以,
,所以,

而,如果是在位姿 的附近进行同样的误差分布呢,则可以表示为
的附近进行同样的误差分布呢,则可以表示为 ,用公式表示如下,
,用公式表示如下,

还可以推导出, ,
,

但不能认为, 是绕着
是绕着 进行高斯分布的。因为李代数也都是相对的,根据BCH公式,
进行高斯分布的。因为李代数也都是相对的,根据BCH公式,

因为不一定是个微小值,所以不能用BCH近似。所以,通过上面公式可以看出,如果没有 的话,则
的话,则 服从的分布和
服从的分布和 一样,会是高斯分布。但是,在
一样,会是高斯分布。但是,在 的情况下,
的情况下, 会随着
会随着 值的改变而改变。在不同位置对高斯曲线会有不同的改变,所以,
值的改变而改变。在不同位置对高斯曲线会有不同的改变,所以, 也就不会服从高斯分布,并且对应的协方差也会随之改变。参考《李代数及其协方差都是相对的》。
也就不会服从高斯分布,并且对应的协方差也会随之改变。参考《李代数及其协方差都是相对的》。
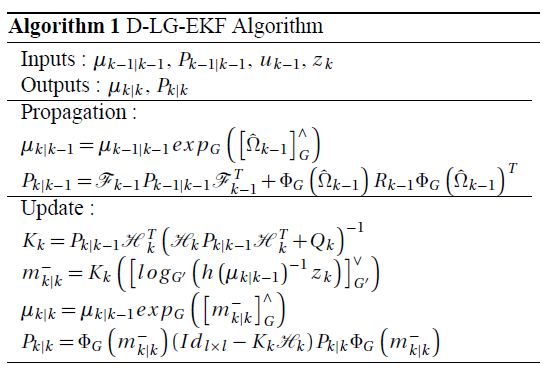
二.D-LG-EKF
2.1系统模型
 是第
是第 时刻的状态,
时刻的状态, 是外界输入,
是外界输入, 是噪声,则对下一个状态的预测为,
是噪声,则对下一个状态的预测为,

其中, 表示的是,这个输入所造成的位姿变换的李代数。要注意的是,
表示的是,这个输入所造成的位姿变换的李代数。要注意的是, 并不直接代表
并不直接代表 上的噪声,虽然它的来源是
上的噪声,虽然它的来源是 上的噪声,它需要根据
上的噪声,它需要根据 上的噪声,通过
上的噪声,通过 的实际表达式,转换出来。
的实际表达式,转换出来。
因为 和
和 都是已知的,假设只在
都是已知的,假设只在 的作用下,状态
的作用下,状态 变成了
变成了 。则,
。则,
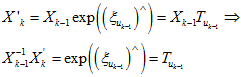
而 所表示的就是,
所表示的就是,

因为 和
和 都是已知的,所以可以通过这个状态变换,计算得到
都是已知的,所以可以通过这个状态变换,计算得到 。参考《视觉SLAM十四讲》的图4-1,可以将
。参考《视觉SLAM十四讲》的图4-1,可以将 转换为
转换为 。所以,
。所以, 也就可以得到了。
也就可以得到了。
测量方程。

2.2传播
假设在 时刻的状态的后验概率分布服从,
时刻的状态的后验概率分布服从, 。即,
。即,

如果没有噪声的话,则对下一个状态均值的预测 为,
为,
而根据之前的公式,对 预测的分布满足,
预测的分布满足,

所以,设下一个状态的误差分布为 ,则它要满足,
,则它要满足,
可以得出,
参考《李代数扰动的理解》,当 时,
时, ,所以,上式可以转换为,
,所以,上式可以转换为,

要注意的是, ,因为这里的
,因为这里的 其实表示的是一种分布,
其实表示的是一种分布, ,所以,
,所以, ,所以,原式还可以转换成,
,所以,原式还可以转换成,

上式的右边都是已知的,所以就是代表了从 到
到 的变换关系。首先,根据伴随性质,得到,
的变换关系。首先,根据伴随性质,得到,
再根据BCH近似公式,上式可以转换为,

令 ,则直接使用BCH公式,上式可以转换为,
,则直接使用BCH公式,上式可以转换为,
又因为 和
和 都是小量,所以
都是小量,所以 可以忽略掉,上式可以转换为,
可以忽略掉,上式可以转换为,

所以,  与
与 的关系又可以表示为,
的关系又可以表示为,

对上面的变换关系,在 处进行线性化,也就是进行一阶泰勒展开,
处进行线性化,也就是进行一阶泰勒展开,

则,
因为 ,所以
,所以 ,代入上式,得到,
,代入上式,得到,
所以,最终得到,

而另外一个,
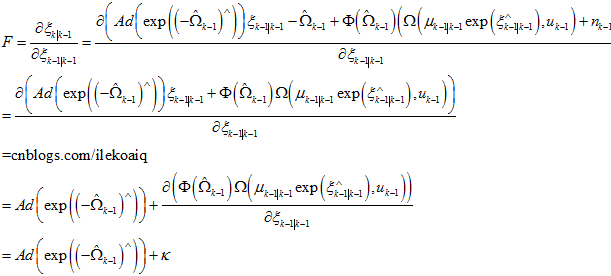
所以,
然后,根据实际的运动方程, 的表达式,算出
的表达式,算出 的解析式,再求出
的解析式,再求出 。(或者,也可以用数值扰动的方法,求
。(或者,也可以用数值扰动的方法,求 。),然后得到
。),然后得到 。
。
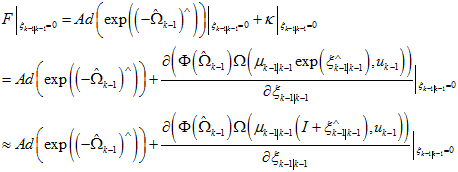
继续之前的变换关系进行一阶泰勒展开,
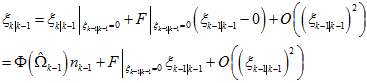
其中, 是一个微小量,可以忽略掉。所以,就得到了
是一个微小量,可以忽略掉。所以,就得到了 与
与 之间的线性转换关系。
之间的线性转换关系。

用 表示
表示 ,得到,
,得到,

再计算扰动的均值 ,
,

然后,再计算 的协方差
的协方差 。协方差的计算,参考《机器人状态估计》的第二章。
。协方差的计算,参考《机器人状态估计》的第二章。
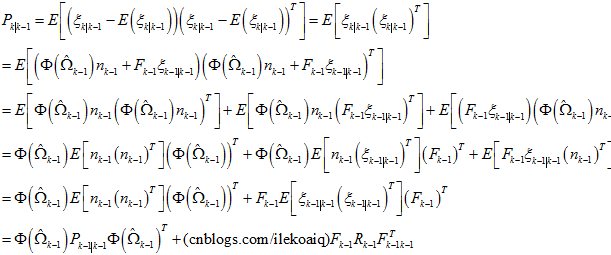
所以,最后得到,

2.3更新
对预测出来的扰动和实际测量出来的扰动,进行融合。
对测量值的处理,可以直接是传感器的测量值,比如加速度计的测量值,然后再考虑这个测量值上的高斯噪声。将预测出来的测量值与实际的测量值进行融合,然后再反馈给状态。
对测量值的处理,也可以转换成李代数的形式。就像是madgwick算法一样,以之前的姿态为初值,优化姿态,使得通过姿态计算出来的测量值与实际测量值最接近。而在本文中,采用的就是这种方法。(如果测量值只是加速度计或磁场计的测量向量的话,就更简单了,因为madgwick要优化出四元数,而本文只要李代数就可以了。以之前的姿态为初值,优化姿态,使得通过姿态计算出来的加速度计向量与实际加速度计向量最接近,而这两个向量之间的相对位姿变化,只需要叉乘一下就可以了,不需要通过优化。如果测量值是其它的,比如图像上的特征点位置,那就只能通过优化的方法,优化出测量位姿,或者采用上一种测量值融合的方法。或者,也可以与视觉SLAM结合起来,直接以图像计算出来的姿态或位姿为测量值。)
设第k时刻位姿的真实值为 。
。
首先,有个预测的位姿 ,它的协方差为
,它的协方差为 。则意味着概率,
。则意味着概率,
 。
。
基于这个预测的位姿,预测出来的传感器的测量值 ,然后有传感器的实际测量值
,然后有传感器的实际测量值 。用
。用 作为位姿初值,优化(或叉乘)出新的位姿,使得预测测量值与实际测量值
作为位姿初值,优化(或叉乘)出新的位姿,使得预测测量值与实际测量值 最接近。用
最接近。用 ,表示优化出来的位姿相对于预测位姿的位姿。所以,实际测量值位姿可以表示为,
,表示优化出来的位姿相对于预测位姿的位姿。所以,实际测量值位姿可以表示为,


其中, 是传感器的测量值
是传感器的测量值 的噪声,传递到
的噪声,传递到 之后,再分离到右边去。
之后,再分离到右边去。 可以通过这个过程中的变换,从实际传感器的测量值协方差,转换过来。
可以通过这个过程中的变换,从实际传感器的测量值协方差,转换过来。
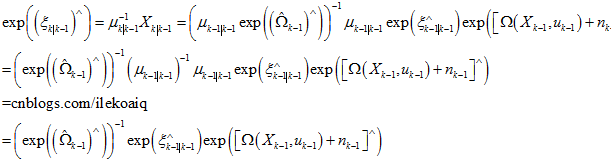
所以,这就意味着,

所以,综合目前的信息,可以得到, ,就是要求一个
,就是要求一个 ,使得
,使得 最大。
最大。
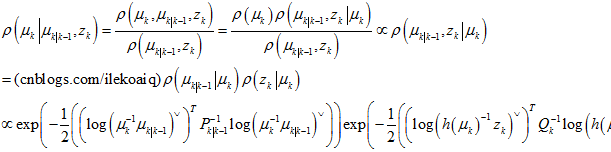
其中, 是个未知数,用
是个未知数,用 ,转换成用未知数
,转换成用未知数 来表示。然后,上式就可以转换为,
来表示。然后,上式就可以转换为,
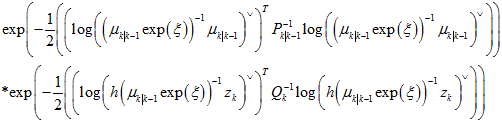
但这样子也解不出来。参考《李代数高斯分布的求导》,对上式中的部分,在 处进行线性化,一阶泰勒展开。则可以转换为,
处进行线性化,一阶泰勒展开。则可以转换为,
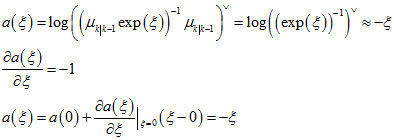
同理,
其中, 的计算,用数值扰动的方法。当然,也可以用解析的方法,把公式都展开来推导。(或者,参考《MSF详细解读》里面的方法,为了算H矩阵,直接就认为
的计算,用数值扰动的方法。当然,也可以用解析的方法,把公式都展开来推导。(或者,参考《MSF详细解读》里面的方法,为了算H矩阵,直接就认为 ,这样子算H矩阵很方便,其余的与原来方法一样。如果是上式的话,则
,这样子算H矩阵很方便,其余的与原来方法一样。如果是上式的话,则 )。
)。
接下来,为了转换成卡尔曼滤波的形式,用 来表示。
来表示。
所以,原式就可以表示为,

这样子,参考《从贝叶斯到卡尔曼滤波》,就可以转换成卡尔曼滤波的形式了。

所以,得到了融合后的扰动 ,
,
同时, 满足,
满足,

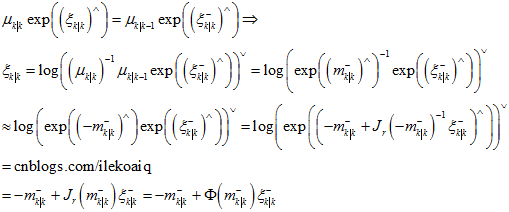
所以,预测出来的位姿 ,乘以这个融合后的扰动均值
,乘以这个融合后的扰动均值 ,就得到了融合后的位姿
,就得到了融合后的位姿 ,
,
所以,新的位姿的李代数为 ,
,
则新位姿附近的李代数扰动 要满足,
要满足,
所以,新的扰动 的均值
的均值 和协方差
和协方差 ,
,

协方差,
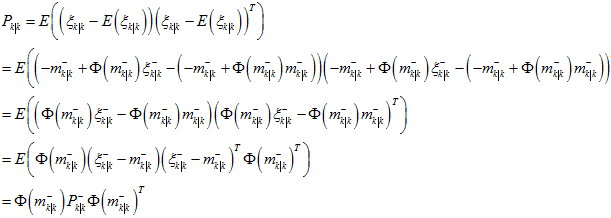
所以,
三.总结
总结起来,流程就是,
四.参考文献
- Bourmaud G, Megret R, Giremus A, et al. Discrete Extended Kalman Filter on Lie groups[C]// Signal Processing Conference. EURASIP, 2013:1-5.
相机IMU融合四部曲(一):D-LG-EKF详细解读的更多相关文章
- 相机IMU融合四部曲(三):MSF详细解读与使用
相机IMU融合四部曲(三):MSF详细解读与使用 极品巧克力 前言 通过前两篇文章,<D-LG-EKF详细解读>和<误差状态四元数详细解读>,已经把相机和IMU融合的理论全部都 ...
- 相机IMU融合四部曲(二):误差状态四元数详细解读
相机IMU融合四部曲(二):误差状态四元数详细解读 极品巧克力 前言 上一篇文章,<D-LG-EKF详细解读>中,讲了理论上的SE3上相机和IMU融合的思想.但是,还没有涉及到实际的操作, ...
- 相机-imu外参校准总结
1. 研究背景及相关工作 1)研究背景 单目视觉惯性slam是一种旨在跟踪移动平台的增量运动并使用来自单个车载摄像头和imu传感器的测量结果同时构建周围环境地图的技术.视觉相机和惯性测量单元(imu) ...
- 相机imu外参标定
1. 第一步初始化imu外参(可以从参数文档中读取,也可以计算出),VINS中处理如下: # Extrinsic parameter between IMU and Camera. estimate_ ...
- VINS(四)初始化与相机IMU外参标定
和单目纯视觉的初始化只需要获取R,t和feature的深度不同,VIO的初始化话通常需要标定出所有的关键参数,包括速度,重力方向,feature深度,以及相机IMU外参$R_{c}^{b}$和$p_{ ...
- 视觉和imu融合的算法研究
融合方式概述 同SLAM发展过程类似,视觉融合IMU问题也可以分成基于滤波和基于优化两大类. 同时按照是否把图像特征信息加入状态向量来进行分类,可以分为松耦合和紧耦合两大类. 一.基于滤波的融合算法 ...
- 【项目实战】自备相机+IMU跑通Vins-Mono记录
前言 初次接触SLAM,公司要求用自己的设备来跑通vinsmono这个程序,虽然已经跑通了别人的数据包,但是真正自己上手来运行这个程序,发现真的是困难重重,特意在此记载下来整个过程,以供大家参考. 我 ...
- 解放双手——相机与IMU外参的在线标定
本文作者 沈玥伶,公众号:计算机视觉life,编辑部成员 一.相机与IMU的融合 在SLAM的众多传感器解决方案中,相机与IMU的融合被认为具有很大的潜力实现低成本且高精度的定位与建图.这是因为这两个 ...
- 相机标定:kalibr标定工具箱使用总结
1 多相机标定 1.1采集图像和IMU 1.2制作Bag包 1)组织文件结构 ~/kalibr_workspace/test/stereo_calib bagsrc cam0 (1+time(0))* ...
随机推荐
- display的flex属性使用详解
flex的兼容性在pc端还算阔以,但是在移动端,那就呵呵了.今天我们只是学习学习,忽略一些不重要的东西. 首先flex的使用需要有一个父容器,父容器中有几个items. 父容器:container 属 ...
- Request.UrlReferrer详解
使用前需要进行判断: if (Request != null && Request.UrlReferrer != null && Request.UrlReferrer ...
- javascript基础-js对象
一.js对象的创建 1.普通最简单的方式 var teacher = new Object( ); teacher.name = "zhangsan"; teacher.age = ...
- my.conf配置大全
[client]port = 3306socket = /tmp/mysql.sock [mysqld]port = 3306socket = /tmp/mysql.sock basedir = /u ...
- 操作系统-百科:Linux
ylbtech-操作系统-百科:Linux Linux是一套免费使用和自由传播的类Unix操作系统,是一个基于POSIX和UNIX的多用户.多任务.支持多线程和多CPU的操作系统.它能运行主要的UNI ...
- 第三方登录之微信登录,基于ThinkSDK
本文基于ThinkSDK,为其补充微信登录demo 增加ThinkSDK的微信第三方登录 阅读本文之前请先了解ThinkSDK的文档 http://www.echomod.com/nexstep/fo ...
- Java对象和它的内存管理
java中的内存管理分为两个方面: 内存分配:指创建java对象时JVM为该对象在堆空间中所分配的内存空间. 内存回收:指java 对象失去引用,变成垃圾时,JVM的垃圾回收机制自动清理该对象,并回收 ...
- 仅用CSS3创建h5预加载双旋圈
<head> <meta charset="UTF-8"> <title></title> <style type=" ...
- 硬盘IOPS与读写速度
IOPS (Input/Output Per Second)即每秒的输入输出量(或读写次数),是衡量磁盘性能的主要指标之一.IOPS是指单位时间内系统能处理的I/O请求数量,一般以每秒处理的I/O请求 ...
- svn关键词BASE, HEAD, COMMITTED, PREV的深入理解
svn关键词BASE, HEAD, COMMITTED, PREV可以很方便用于日常操作中,但是很多人对他们的工作原理和方式不是太了解. 在这里我将使用用例,诠释他们的作用和意图. 先给出svn手册中 ...