SIFT 、Hog 、LBP 了解
SIFT、HOG、LBP,这三者都属于局部特征。
一、三者原理上的区别
1.SIFT:Scale-Invariant Feature Taransform,尺度不变特征变换。
- 尺度空间的极值检测:搜索所有尺度空间上的图像,通过高斯微分函数来识别潜在的对尺度和旋转鲁棒性较强的点。
- 特征点定位:在每个候选位置上,通过一个拟合精细模型(尺度空间DoG函数进行曲线拟合)来确定位置尺度,关键点的选取依据他们的稳定程度。
- 特征方向赋值:基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向,后续的所有操作都是对于关键点的方向、尺度和位置进行变换,从而提供这些特征的不变性。
- 特征点描述:在每个特征点周围的领域内,在选定的尺度上测量图像的局部梯度,计算块内梯度直方图,生成具有独特性的向量。
2.HOG:Histogram of Oriented Gradient,方向梯度直方图。
- 颜色空间归一化:为了减少光照因素的影响, 首先需要将整个图像归一化。因为颜色信息作用不大,通常先转化为灰度图。
- 梯度计算:计算图像横坐标和纵坐标方向的梯度,并据此计算每个像素位置的梯度方向值;求导操作不仅能捕获轮廓,还能进一步弱化光照的影响。
- 梯度方向直方图:将图像分成若干个cell,对cell内每个像素用梯度方向在直方图中进行加权投影(映射到固定的角度范围),就可以得到这个cell的梯度直方图。
- 将每几个cell组成一个block(例如3*3个cell/block),一个block内所有cell的特征descriptor串联起来便得到该block的HOG特征descriptor。
- 组成特征:将图像image内的所有block的HOG特征descriptor串联起来就可以得到该image(你要检测的目标)的HOG特征descriptor。
3.LBP:Local Binary Pattern,局部二值模式。
原始的LBP算子定义在像素3*3的邻域内,以邻域中心像素为阈值,相邻的8个像素的灰度值与邻域中心的像素值进行比较,若周围像素大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经过比较可产生8位二进制数,将这8位二进制数依次排列形成一个二进制数字,这个二进制数字就是中心像素的LBP值,LBP值共有28种可能,因此LBP值有256种。中心像素的LBP值反映了该像素周围区域的纹理信息。
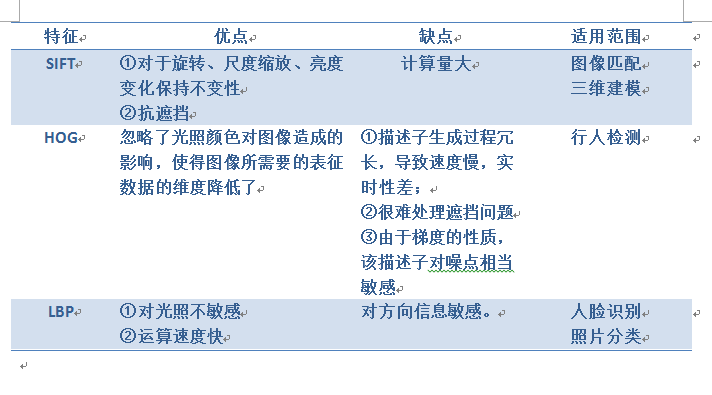
二、三者的优缺点及适用范围
参考文献:
1.【SIFT特征详解】
2.【LBP特征原理及代码实现】
9/1/2017 5:29:04 PM
作者:盛淮南
链接:https://www.zhihu.com/question/45833619/answer/223930439
来源:知乎
SIFT 、Hog 、LBP 了解的更多相关文章
- SIFT+HOG+鲁棒统计+RANSAC
今天的计算机视觉课老师讲了不少内容,不过都是大概讲了下,我先记录下,细讲等以后再补充. SIFT特征: 尺度不变性:用不同参数的高斯函数作用于图像(相当于对图像进行模糊,得到不同尺度的图像),用得到的 ...
- 视觉中的经典图像特征小结(一): 颜色直方图, HOG, LBP
[普兒原创, 如有错误和纰漏欢迎指正. 更新中...] 1. 颜色直方图 颜色空间在本质上是定义在某种坐标系统下的子空间,空间中的每一个坐标表示一种不同的颜色.颜色空间的目的在于给出某种颜色标准,使得 ...
- LBP特征学习(附python实现)
LBP的全称是Local Binary Pattern即局部二值模式,是局部信息提取中的一种方法,它具有旋转不变性和灰度不变性等显著的优点.在人脸识别领域有很多案例,此外,局部特征的算法还有 SIFT ...
- 行人检测4(LBP特征)
参考原文: http://blog.csdn.net/zouxy09/article/details/7929531 http://www.cnblogs.com/dwdxdy/archive/201 ...
- 图像的全局特征--HOG特征、DPM特征
HOG特征:方向梯度直方图(Histogram of Oriented Gradient,)特征是一种全局图像特征描述子. 它通过计算和统计图像局部区域的梯度方向直方图来构成特征.Hog特征结合SVM ...
- sift、surf、orb 特征提取及最优特征点匹配
目录 sift sift特征简介 sift特征提取步骤 surf surf特征简介 surf特征提取步骤 orb orb特征简介 orb特征提取算法 代码实现 特征提取 特征匹配 附录 sift si ...
- state-of-the-art implementations related to visual recognition and search
http://rogerioferis.com/VisualRecognitionAndSearch2014/Resources.html Source Code Non-exhaustive lis ...
- R-CNN论文翻译
R-CNN论文翻译 Rich feature hierarchies for accurate object detection and semantic segmentation 用于精确物体定位和 ...
- 论文笔记(一)---翻译 Rich feature hierarchies for accurate object detection and semantic segmentation
论文网址: https://arxiv.org/abs/1311.2524 RCNN利用深度学习进行目标检测. 摘要 可以将ImageNet上的进全图像分类而训练好的大型卷积神经网络用到PASCAL的 ...
- 【原创 深度学习与TensorFlow 动手实践系列 - 1】第一课:深度学习总体介绍
最近一直在研究机器学习,看过两本机器学习的书,然后又看到深度学习,对深度学习产生了浓厚的兴趣,希望短时间内可以做到深度学习的入门和实践,因此写一个深度学习系列吧,通过实践来掌握<深度学习> ...
随机推荐
- [Android Memory] 使用 Eclipse Memory Analyzer 进行堆转储文件分析
转载地址:http://www.ibm.com/developerworks/cn/opensource/os-cn-ecl-ma/index.html Eclipse Memory Analyzer ...
- docker和虚拟化技术的区别
1.docker和虚拟化技术的区别 Docker 扩展了 Linux 容器(Linux Containers),或着说 LXC,通过一个高层次的 API 为进程单独提供了一个轻量级的虚拟环境.Dock ...
- C语言指针加1问题以及字节对齐问题
今天早上自己写了一段代码,然后测试的时候发现结果总是和预期的不一样,而且偏差的有点离谱,冥思苦想了将近五个小时,最后在我要开始怀疑人生的时候,发现原来是自己犯了一个极其低级但又容易被忽略的问题.好吧, ...
- cocob优化算法
cocob算法是一个启发式的算法,针对SGD不需要设置learning rate. https://github.com/bremen79/cocob
- echarts使用记录(二)legend翻页,事件,数据集,设置y轴最大/小值,让series图形从右侧出往左移动
1.有时候legend比较多的时候,需要做翻页比较好,有个属性legend的type属性设置为scroll,然后animation可以控制动画,官方文档均可查. 再就是scrollDataIndex, ...
- SQL 增删字段
摘自: http://www.cnblogs.com/yiwd/archive/2012/12/25/2831822.html 下面为您介绍使用SQL语句如何增加.删除.修改字段,并判断字段是否存在的 ...
- phpnow 在win7下遇到“安装服务[apache_pn]失败”问题的一种解决办法
安装PHPnow时如果遇到下列问题: 安装服务[apache_pn]失败.可能原因如下: 1. 服务名已存在,请卸载或使用不同的服务名. 2. 非管理员权限,不能操作 Windows NT 服务. 将 ...
- java线程同步问题——由腾讯笔试题引发的风波
刚刚wm问我了一道线程的问题,因为自己一直是coder界里的渣渣.所以就须要恶补一下. 2016年4月2号题目例如以下. import java.util.logging.Handler; /** * ...
- POJ 2823 UESTCoj 1221 Sliding Window 单调队列 经典入门题
题意:给出一个序列,求出每连续k个数字中最大的数和最小的数. 这是道单调队列裸题,直接写就行了. 本来用deque写出来后,发现在poj上硬是超时了,在discuss上看很多人也在抱怨超时的问题,据说 ...
- VMware Workstation的网络连接方式:NAT、桥接和Host Only
安装完VMware Workstation后会自动生成两个网络连接:VMware Network Adapter VMnet8 和 VMware Network Adapter VMnet1(通常称为 ...