u-boot-1.1.6第2阶段入口函数start_armboot分析
学习目标:
1、分析u-boot-1.1.6第2阶段入口函数void start_armboot (void),熟悉该函数所实现的功能
2、为后面能够掌握u-boot-1.1.6如何启动内核过程打下基础
前面通过对uboot第一阶段代码的分析,我们了解的uboot第一阶段所做的一些工作,并且找到了其第二阶段的入口函数void start_armboot(void)。为了能够在清楚理解uboot启动内核的机制,还需要对第二阶段代码进行分析。第二阶段入口函数void start_armboot(void)存放在board.c文件中,该文件位于uboot根目录下的lib_arm文件夹中。
1.gd_t数据结构分配内存
- /* Pointer is writable since we allocated a register for it */
- gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t)); //为gd_t结构体变量开辟空间
- /* compiler optimization barrier needed for GCC >= 3.4 */ //并使得gd指针指向该空间初始位置
- __asm__ __volatile__("": : :"memory");
- memset ((void*)gd, , sizeof (gd_t)); //gd获取内存块清零
- gd->bd = (bd_t*)((char*)gd - sizeof(bd_t)); //为bd_t结构体变量开辟空间,并使得gd->bd指针指向bd_t的初始位置
- memset (gd->bd, , sizeof (bd_t)); //bd_t内存范围清零
start_armboot函数首先为gd_t数据类型分配相应的内存空间,并使得gd指针指向这块内存空间。gd指针在global_data.h文件(位于uboot根目录下的include/asm-arm文件夹)中声明,在start_armboot函数中定义,声明形式为:
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r8")
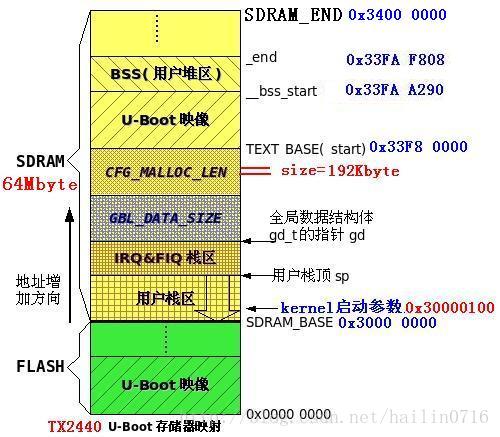
这个声明告诉编译器使用CPU寄存器r8来存储gd_t类型的指针gd,即这个定义声明了一个指针,并且指明了它的存储位置。register表示变量放在机器的寄存器,volatile的作用是作为指令关键字,确保本条指令不会因编译器的优化而省略,且要求每次使用直接读值。gd_t数据结构紧接在uboot自定义的堆区域下的全局变量区域进行存放,分配完成后使用memset函数对这块内存进行清零,uboot存储器映射图如下所示:
 2.硬件的初始化
2.硬件的初始化
- for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
- if ((*init_fnc_ptr)() != ) {
- hang ();
- }
- }
init_fnc_ptr是在start_armboot函数中定义的局部变量,该变量是一个二级指针,指向int (init_fnc_t) (void)类型函数的指针。init_sequence是一个指针数组的名称,指针数组init_sequence[]存放硬件初始化函数的地址。使用这种方式调用函数的好处是如果要添加初始化一些新的硬件时,只需写出新硬件初始化函数,将编写初始化函数名放在init_sequence[]中,不用修改其他代码,便能调用新的硬件初始化函数。指针数组内容如下:
- init_fnc_t *init_sequence[] = {
- cpu_init, /* basic cpu dependent setup */
- board_init, /* basic board dependent setup */
- interrupt_init, /* set up exceptions */
- env_init, /* initialize environment */
- init_baudrate, /* initialze baudrate settings */
- serial_init, /* serial communications setup */
- console_init_f, /* stage 1 init of console */
- display_banner, /* say that we are here */
- /* 未定义CONFIG_DISPLAY_CPUINFO宏,print_cpuinfo不被编译 */
- #if defined(CONFIG_DISPLAY_CPUINFO)
- print_cpuinfo, /* display cpu info (and speed) */
- #endif
- /* 未定义CONFIG_DISPLAY_BOARDINFO宏,checkboard不被编译 */
- #if defined(CONFIG_DISPLAY_BOARDINFO)
- checkboard, /* display board info */
- #endif
- dram_init, /* configure available RAM banks */
- display_dram_config,
- NULL,
- };
cpu_init函数功能:如果配置文件使能IRQ中断和FIQ中断,那么就获取uboot存储器映射中IRQ、FIQ堆栈的地址,将其保存在全局变量IRQ_STACK_START和FIQ_STACK_START中。
board_init函数功能:设置系统时钟,初始化相应的GPIO端口,设置全局变量gd->bd->bi_arch_number = MACH_TYPE_SMDK2410;(arch number of SMDK2410-Board),gd->bd->bi_boot_params = 0x30000100(传给内核启动参数的地址),使能指令缓存和数据缓存。
interrupt_init函数功能:初始化系统定时器
env_init函数功能:从flash中读取环境变量并进行crc校验,校验成功使用flash中环境变量的地址,校验失败使用默认环境变量的地址gd->env_addr = (ulong)&default_environment[0];
init_baudrate函数功能:读取环境变量中波特率的值
serial_init函数功能:根据读取的波特率数值初始化串口
console_init_f函数功能:设置串口控制台
display_banner函数功能:串口打印uboot版本信息,以及uboot代码段、bss段链接地址
dram_init函数功能:将sdram起始地址和大小存入gt指针所指向全局变量 gd->bd->bi_dram[0].start = PHYS_SDRAM_1;gd->bd->bi_dram[0].size = PHYS_SDRAM_1_SIZE;
display_dram_config函数功能:串口打印sdram其实地址和大小的信息
3.初始化nor flash和nand flash
- /* 未定义CFG_NO_FLASH宏,执行flash_init()初始化函数,打印flash容量 */
- #ifndef CFG_NO_FLASH
- /* configure available FLASH banks */
- size = flash_init (); //读出板载flash大小
- display_flash_config (size); //串口打印flash容量大小
- #endif /* CFG_NO_FLASH */
- /* 未定义CONFIG_VFD宏,不支持VFD液晶屏,此处代码不用分析 */
- #ifdef CONFIG_VFD //液晶屏(不执行)
- # ifndef PAGE_SIZE
- # define PAGE_SIZE
- # endif
- /*
- * reserve memory for VFD display (always full pages)
- */
- /* bss_end is defined in the board-specific linker script */
- addr = (_bss_end + (PAGE_SIZE - )) & ~(PAGE_SIZE - );
- size = vfd_setmem (addr);
- gd->fb_base = addr;
- #endif /* CONFIG_VFD */
- /* 未定义CONFIG_LCD宏,不支持LCD液晶屏,此处代码不用分析 */
- #ifdef CONFIG_LCD //液晶屏(不执行)
- # ifndef PAGE_SIZE
- # define PAGE_SIZE
- # endif
- /*
- * reserve memory for LCD display (always full pages)
- */
- /* bss_end is defined in the board-specific linker script */
- addr = (_bss_end + (PAGE_SIZE - )) & ~(PAGE_SIZE - );
- size = lcd_setmem (addr);
- gd->fb_base = addr;
- #endif /* CONFIG_LCD */
- /* 将malloc连接地址指定在指定内存位置 */
- /* armboot_start is defined in the board-specific linker script */
- mem_malloc_init (_armboot_start - CFG_MALLOC_LEN);
- /* 未定义CFG_CMD_NAND宏,此处代码不被编译 */
- #if (CONFIG_COMMANDS & CFG_CMD_NAND) //开发板是否板载nand flash,若对nand flash 进行初始化
- puts ("NAND: ");
- nand_init(); /* go init the NAND */
- #endif
这段代码根据include/configs/smdk2410.h文件中的配置宏,选择性编译代码,初始化nor flash和nand flash,并读出flash的大小,通过串口打印相关信息到控制台。
5.配置网络和使能中断
- devices_init (); /* get the devices list going. */
- /* 未定义CONFIG_CMC_PU2,此处代码不编译 */
- #ifdef CONFIG_CMC_PU2
- load_sernum_ethaddr ();
- #endif /* CONFIG_CMC_PU2 */
- jumptable_init ();
- console_init_r (); /* fully init console as a device */
- /* 未定义CONFIG_MISC_INIT_R,此处代码不编译 */
- #if defined(CONFIG_MISC_INIT_R)
- /* miscellaneous platform dependent initialisations */
- misc_init_r ();
- #endif
- /* enable exceptions */
- enable_interrupts ();
- /* Perform network card initialisation if necessary */
- #ifdef CONFIG_DRIVER_CS8900
- cs8900_get_enetaddr (gd->bd->bi_enetaddr);
- #endif
- /* 未定义CONFIG_DRIVER_SMC91111和CONFIG_DRIVER_LAN91C96,此处代码不编译 */
- #if defined(CONFIG_DRIVER_SMC91111) || defined (CONFIG_DRIVER_LAN91C96)
- if (getenv ("ethaddr")) {
- smc_set_mac_addr(gd->bd->bi_enetaddr);
- }
- #endif /* CONFIG_DRIVER_SMC91111 || CONFIG_DRIVER_LAN91C96 */
- /* Initialize from environment */
- if ((s = getenv ("loadaddr")) != NULL) {
- load_addr = simple_strtoul (s, NULL, );
- }
- #if (CONFIG_COMMANDS & CFG_CMD_NET)
- if ((s = getenv ("bootfile")) != NULL) {
- copy_filename (BootFile, s, sizeof (BootFile));
- }
- #endif /* CFG_CMD_NET */
- /* 未定义BOARD_LATE_INIT,不编译此处代码 */
- #ifdef BOARD_LATE_INIT
- board_late_init ();
- #endif
- /* 未定义CFG_CMD_NET,此处不编译 */
- #if (CONFIG_COMMANDS & CFG_CMD_NET)
- #if defined(CONFIG_NET_MULTI)
- puts ("Net: ");
- #endif
- eth_initialize(gd->bd);
- #endif
5.跳转到main_loop函数
- /* main_loop() can return to retry autoboot, if so just run it again. */
- for (;;) {
- main_loop ();
- }
- }
start_armboot函数经过一系列初始化之后,会再次跳转到main_loop函数中执行后续的操作。
总结:start_armboot函数
1、在uboot存储映射的全局变量区为全局结构gt_t分配内存空间,并让全局指针gt指向该分配内存空间入口地址
2、完成一些硬件的初始化,例如:设置系统时钟和GPIO端口,使能指令Cache和数据Cache,设置串口,初始化flash等
3、读取后续过程使用的信息,将其存储到gt指针指向的gt_t结构的内存空间中
4、会再次跳转到main_loop函数中执行其他后续操作
u-boot-1.1.6第2阶段入口函数start_armboot分析的更多相关文章
- React组件生命周期-初始化阶段的函数执行顺序
<!DOCTYPE html> <html lang="zh-cn"> <head> <meta charset="UTF-8& ...
- 【Beta阶段】M2事后分析
先上照片,最后一次开会了啊... 计划 你原计划的工作是否最后都做完了? 如果有没做完的,为什么? 答:没有全部做完,到目前为止,我们的还有几个实验的报告生成功能没有上线.这几个实验的数据处理文件已经 ...
- (转)spring boot实战(第三篇)事件监听源码分析
原文:http://blog.csdn.net/liaokailin/article/details/48194777 监听源码分析 首先是我们自定义的main方法: package com.lkl. ...
- spring boot actuator工作原理之http服务暴露源码分析
spring boot actuator的官方文档地址:https://docs.spring.io/spring-boot/docs/current/reference/html/productio ...
- Spring Boot JDBC:加载DataSource过程的源码分析及yml中DataSource的配置
装载至:https://www.cnblogs.com/storml/p/8611388.html Spring Boot实现了自动加载DataSource及相关配置.当然,使用时加上@EnableA ...
- 曹工说Spring Boot源码(18)-- Spring AOP源码分析三部曲,终于快讲完了 (aop:config完整解析【下】)
写在前面的话 相关背景及资源: 曹工说Spring Boot源码(1)-- Bean Definition到底是什么,附spring思维导图分享 曹工说Spring Boot源码(2)-- Bean ...
- spring boot 入口源码分析
public ConfigurableApplicationContext run(String... args) { StopWatch stopWatch = new StopWatch(); / ...
- SpringMVC初始化阶段流程源码分析
1.都知道SpringMVC项目启动的时候都会初始化一个类:DispatcherServlet,看这个类的源码我们可以发现他其实就是一个servlet, 为什么这么说呢?请看: DispatcherS ...
- Spring Boot的自动配置原理及启动流程源码分析
概述 Spring Boot 应用目前应该是 Java 中用得最多的框架了吧.其中 Spring Boot 最具特点之一就是自动配置,基于Spring Boot 的自动配置,我们可以很快集成某个模块, ...
随机推荐
- maven 生命周期、生命周期阶段、插件、目标
生命周期maven的生命周期是抽象的,它本身不做任何实际的工作.实际的工作都由插件来完成.生命周期好比接口,插件好比实现类.maven 有三个独立的生命周期,clean.default.site. 生 ...
- 【Java】数组使用
package aaa; public class aaa { public static void main(String args[]) { int a[]={1,2,3,4}; for(int ...
- Typescript 接口(interface)
概述 typescript 的接口只会关注值的外形,实际就是类型(条件)的检查,只要满足就是被允许的. 接口描述了类的公共部分. 接口 interface Person { firstName: st ...
- Python DDT(data driven tests)模块心得
关于ddt模块的一些心得,主要是看官网的例子,加上一点自己的理解,官网地址:http://ddt.readthedocs.io/en/latest/example.html ddt(data driv ...
- ssm单项目整合
目录 前言 创建maven项目 添加依赖 配置文件 总览 jdbc配置 mybatis配置 dao层配置 service层配置 事务配置 controller配置 web.xml 使用 前言 spri ...
- Prometheus Node_exporter 之 Basic CPU / Mem / Disk Gauge
1. CPU Busy :收集所有 cpu 内核 busy 状态占比 type: SinglestatUnit: perent(0-100)(所有 cpu使用情况 - 5分钟内 cpu 空闲的平均值) ...
- ORA-06512 问题解决
SQL> select * from dba_role_privs where grantee='SUK'; GRANTEE GRANTED_ROLE ADMIN_OPTION DEFA ...
- 使用CAReplicatorLayer [1]
使用CAReplicatorLayer [1] 说明 https://developer.apple.com/library/ios/documentation/GraphicsImaging/Ref ...
- 低级终端IO
低级终端IO 程序会需要对输入输出进行比简单的文件操作更为精确的控制.POSX提供了一套接口允许程序控制终端驱动程序的行为,这套接口称为通用终端接口(GIT). 需要改变终端设置的例子 标准输入输出, ...
- python_微信 跳一跳
今天用python刷了一下微信跳一跳游戏得分数. 不是仅仅是玩一玩,而是为了把开发环境搭建好.(这个借口好) 参考: http://blog.csdn.net/LittleBeautiful/arti ...