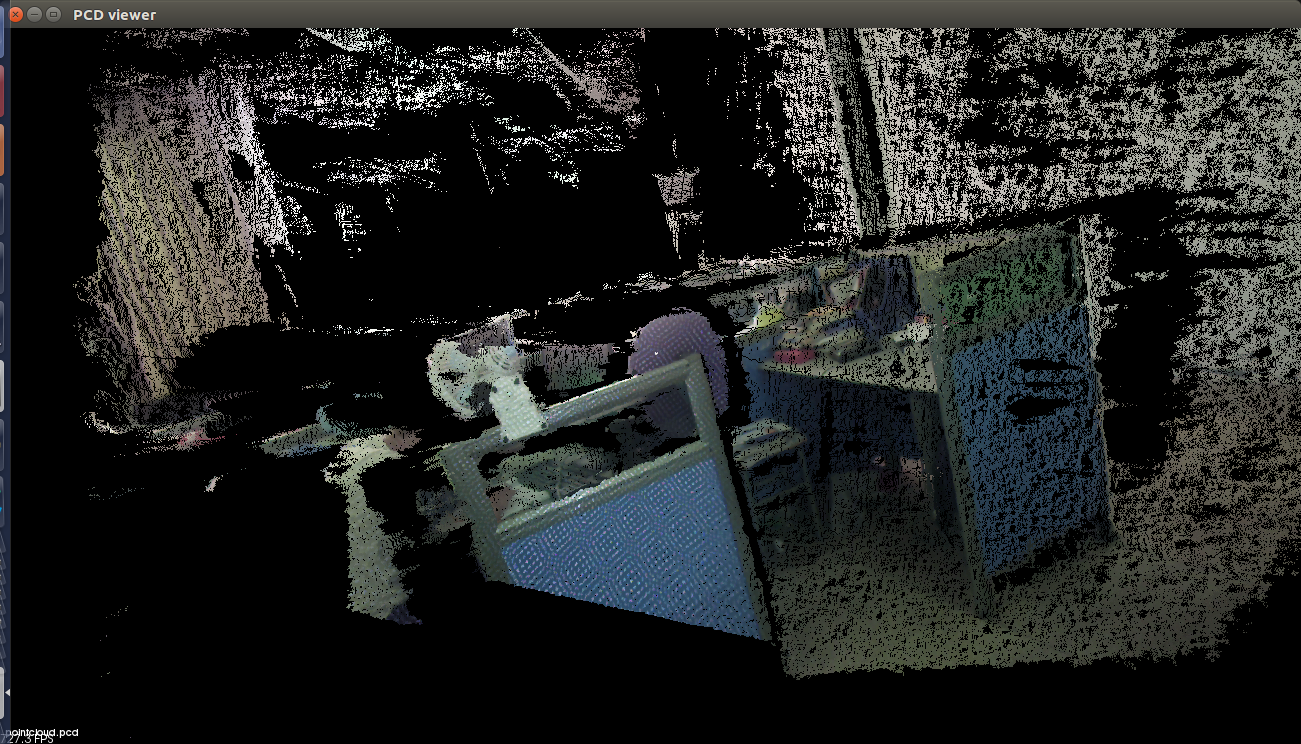
(1)RGB-D点云生成
bin文件夹下为生成的可执行文件generate_cloud,执行时和data文件放在同一文件夹下。
图像数据来自小觅相机。
src下的源码,包括generatePointCloud.cpp和CMakeLists.txt
// C++ 标准库
#include <iostream>
#include <string>
//#include <unistd.h>
using namespace std; // OpenCV 库
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
//#include <pcl/visualization/cloud_viewer.h> // PCL 库
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h> // 定义点云类型
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloud; //pcl::visualization::CloudViewer viewer("pcd viewer"); // 相机内参
const double camera_factor = ;
/*
const double camera_cx = 325.5;
const double camera_cy = 253.5; //nyuv2数据集:http://cs.nyu.edu/~silberman/datasets/
const double camera_fx = 518.0;
const double camera_fy = 519.0;
*/
const double camera_cx = 682.3;
const double camera_cy = 254.9;
const double camera_fx = 979.8; //小觅
const double camera_fy = 942.8; // 主函数
int main( int argc, char** argv )
{
// 读取./data/rgb.png和./data/depth.png,并转化为点云 // 图像矩阵
cv::Mat rgb, depth;
// 使用cv::imread()来读取图像
// API: http://docs.opencv.org/modules/highgui/doc/reading_and_writing_images_and_video.html?highlight=imread#cv2.imread
rgb = cv::imread( "./data/rgb.png" );
// rgb 图像是8UC3的彩色图像
// depth 是16UC1的单通道图像,注意flags设置-1,表示读取原始数据不做任何修改
depth = cv::imread( "./data/depth.png", - ); // 点云变量
// 使用智能指针,创建一个空点云。这种指针用完会自动释放。
PointCloud::Ptr cloud ( new PointCloud );
// 遍历深度图
for (int m = ; m < depth.rows; m++)
for (int n=; n < depth.cols; n++)
{
// 获取深度图中(m,n)处的值
ushort d = depth.ptr<ushort>(m)[n];
// d 可能没有值,若如此,跳过此点
if (d == || d >= )
continue; //获得一个点的位置与颜色
// d 存在值,则向点云增加一个点
PointT p;
// 计算这个点的空间坐标
p.z = double(d) / camera_factor;
p.x = (n - camera_cx) * p.z / camera_fx;
p.y = (m - camera_cy) * p.z / camera_fy;
// 从rgb图像中获取它的颜色
// rgb是三通道的BGR格式图,所以按下面的顺序获取颜色
p.b = rgb.ptr<uchar>(m)[n*];
p.g = rgb.ptr<uchar>(m)[n*+];
p.r = rgb.ptr<uchar>(m)[n*+]; // 把p加入到点云中
cloud->points.push_back( p );
}
/*
// viewer.showCloud(cloud);
// sleep(100);////#include <unistd.h>
// return 0;
*/
// 设置并保存点云
cloud->height = ;
cloud->width = cloud->points.size();
cout<<"point cloud size = "<<cloud->points.size()<<endl;
cloud->is_dense = false;
pcl::io::savePCDFile( "./pointcloud.pcd", *cloud );
// 清除数据并退出
cloud->points.clear();
cout<<"Point cloud saved."<<endl;
return ;
}
CMakeLists.txt
# 增加PCL库的依赖
FIND_PACKAGE( PCL REQUIRED ) list(REMOVE_ITEM PCL_LIBRARIES "vtkproj4") # use this in Ubuntu 16.04
# 增加opencv的依赖
FIND_PACKAGE( OpenCV REQUIRED ) # 添加头文件和库文件
ADD_DEFINITIONS( ${PCL_DEFINITIONS} )
INCLUDE_DIRECTORIES( ${PCL_INCLUDE_DIRS} )
LINK_LIBRARIES( ${PCL_LIBRARY_DIRS} ) ADD_EXECUTABLE( generate_cloud generatePointCloud.cpp )
TARGET_LINK_LIBRARIES( generate_cloud ${OpenCV_LIBS}
${PCL_LIBRARIES} )
和src文件夹在同一文件夹下的CMakeLists.txt
CMAKE_MINIMUM_REQUIRED( VERSION 2.8 )
PROJECT( slam ) SET(CMAKE_CXX_COMPILER "g++")
SET( CMAKE_BUILD_TYPE Debug )
SET(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
SET(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib) INCLUDE_DIRECTORIES( ${PROJECT_SOURCE_DIR}/include )
LINK_DIRECTORIES( ${PROJECT_SOURCE_DIR}/lib) ADD_SUBDIRECTORY( ${PROJECT_SOURCE_DIR}/src )
编译后可执行文件在bin中。
学习链接: http://www.cnblogs.com/gaoxiang12/p/4652478.html
(1)RGB-D点云生成的更多相关文章
- 超好玩!10款神奇的字符图案 & 词汇云生成工具
在这里,我们推荐10款惊人的字符图案生成工具.词云可以定义为词频的图形表示,而字符图案发生器是一个把数据,如文字和标签在以视觉和吸引人的方式展示的简单的工具.这些生成工具具有不同的功能,其中包括不同的 ...
- 使用阿里云生成的pem密钥登录
我用的阿里云生成的ssh密钥,服务器上已有公钥,私钥为.pem文件,下载在本地,网上都说要转换为.ppk再用,其实用secure不必转换 一..pem和.ppk文件区别 .pem 密钥通用格式 .p ...
- python词云生成-wordcloud库
python词云生成-wordcloud库 全文转载于'https://www.cnblogs.com/nickchen121/p/11208274.html#autoid-0-0-0' 一.word ...
- 彩色点云生成mesh的纹理
上一篇文章 https://www.cnblogs.com/lovebay/p/11423576.html ,我们使用MPA算法实现了 点云生成mesh,但仅仅实现mesh的顶点着色,为了让mesh有 ...
- 从当当客户端api抓取书评到词云生成
看了好几本大冰的书,感觉对自己的思维有不少的影响.想看看其他读者的评论.便想从当当下手抓取他们评论做个词云.想着网页版说不定有麻烦的反爬,干脆从手机客户端下手好了.果其不然,找到一个书评的api.发送 ...
- Python词云生成
一.目的 1. 熟悉jieba库和wordcloud库的使用方法: 2. 熟悉文本词频统计和词云生成的基本方法. 二.内容 1. 从网上自行下载一个长篇英文小说,统计并输出该小说中词频最大的TOP 2 ...
- python抓取电影<海王>影评词云生成
海王是前段时间大热的影片,个人对这种动漫题材的电影并不是很感兴趣.然鹅,最近这部电影实在太热了,正好最近看自然语言处理的时候,无意间发现了word cloud这个生成词云的库,还蛮好玩的,那就抓抓这部 ...
- [python] 基于词云的关键词提取:wordcloud的使用、源码分析、中文词云生成和代码重写
1. 词云简介 词云,又称文字云.标签云,是对文本数据中出现频率较高的“关键词”在视觉上的突出呈现,形成关键词的渲染形成类似云一样的彩色图片,从而一眼就可以领略文本数据的主要表达意思.常见于博客.微博 ...
- MATLAB plot()、scatter()的RGB颜色设置以及生成渐变色
1.转载:https://blog.csdn.net/wh1312142954/article/details/80796764 plot(x,y,'Color',[R G B]);%只要设置颜色中R ...
随机推荐
- Golang之hello,beego
学习谢大神的beego记录 过程: 目录结构: 编译命令: go build -o myBeego.exe go_dev/day13/beego_example/main执行myBeego.exe即可 ...
- Judy Array API介绍
本文介绍https://code.google.com/p/judyarray/这个JudyArray实现的API. judy_open:新建一个JudyArray,并返回指向这个JudyArray的 ...
- Laravel Nginx 站点配置文件(Homestead)
server { listen 80; listen 443 ssl http2; server_name fmtmis.local; root "/home ...
- 数据库链接 mybatis spring data jpa 两种方式
jdbc mybatis spring data jpa dao service webservice jaxrs jaxws springmvc w ...
- Java动态代理探讨
代理模式: 代理模式是常用的java设计模式,他的特征是代理类与委托类有同样的接口,代理类主要负责为委托类预处理消息.过滤消息.把消息转发给委托类,以及事后处理消息等.通过代理模式,可以延迟创建对象, ...
- linux系统编程之进程(五):exec系列函数(execl,execlp,execle,execv,execvp)使用
本节目标: exec替换进程映像 exec关联函数组(execl.execlp.execle.execv.execvp) 一,exec替换进程映像 在进程的创建上Unix采用了一个独特的方法,它将进程 ...
- Redis java client ==> Jedis
https://github.com/xetorthio/jedis Jedis is a blazingly small and sane Redis java client. Jedis was ...
- (动态规划 最长有序子序列)Monkey and Banana --HDU --1069
链接: http://acm.hdu.edu.cn/showproblem.php?pid=1069 http://acm.hust.edu.cn/vjudge/contest/view.action ...
- Codeforces805D. Minimum number of steps 2017-05-05 08:46 240人阅读 评论(0) 收藏
D. Minimum number of steps time limit per test 1 second memory limit per test 256 megabytes input st ...
- TFlearn——(1)notMNIST
1, 数据集简介 notMNIST, 看名字就知道,跟MNIST脱不了干系,其实就是升级版的MNIST,含有 A-J 10个类别的艺术印刷体字符,字符的形状各异,噪声更多,难度比 MNIST 要 ...