catkin 工作空间 - Package 组成
package 是 ROS 软件的基本组织形式,ROS 就是由一个个的 package 组成的
package 是 catkin 的编译基本单元
一个 package 可以包含多个可执行文件(节点)
package 下要包含这两个文件 CMakeLists.txt、package.xml
CMakeLists.txt 规定 catkin 编译的规则,例如:源文件、依赖项、目标文件
cmake_minimum_required() # 指定 catkin 最低版本
project() # 指定软件包的名称
find_package() # 指定编译时需要的依赖项
add_message_files() # 添加消息文件
add_service_files() # 添加服务文件
add_action_files() # 添加动作文件
generate_messages() # 生成消息、服务、动作
catkin_package() # 指定 catkin 信息给编译系统生成 Cmake 文件
add_library() # 指定生成库文件
add_executable() # 指定生成可执行文件
target_link_libraries() # 指定可执行文件去链接哪些库
catkin_add_gtest() # 添加测试单元
install() # 生成可安装目标
package.xml:定义 package 的属性,例如:包名、版本号、作者、依赖等
<package> <!--根标签-->
<name> <!--包名-->
<version> <!--版本号-->
<description> <!--包描述-->
<maintainer> <!--维护者-->
<license> <!--软件许可-->
<buildtool_depend> <!--编译工具-->
<build_depend> <!--编译时的依赖-->
<run_depend> <!--运行时的依赖-->
</package> <!--根标签-->
代码文件:
package:CMakeLists.txt、package.xml、script(放 shell 脚本或 python 脚本)、include(放 C 的头文件 .h)、src(放 C 的源文件.cpp,也能放 python 的源文件)
自定义通信格式:
消息(msg)、服务(srv)、动作(action)
package:CMakeLists.txt、package.xml、msg(存放 .msg 文件)、srv(存放 .srv 文件)、action(存放 .action 文件)
launch 以及配置文件:
launch文件(launch)、配置文件(yaml)
package:CMakeLists.txt、package.xml、config(.yaml)、launch(.lanuch)
常用的包管理指令:
创建一个 package:catkin_creat_pkg <pkg_name> [deps]
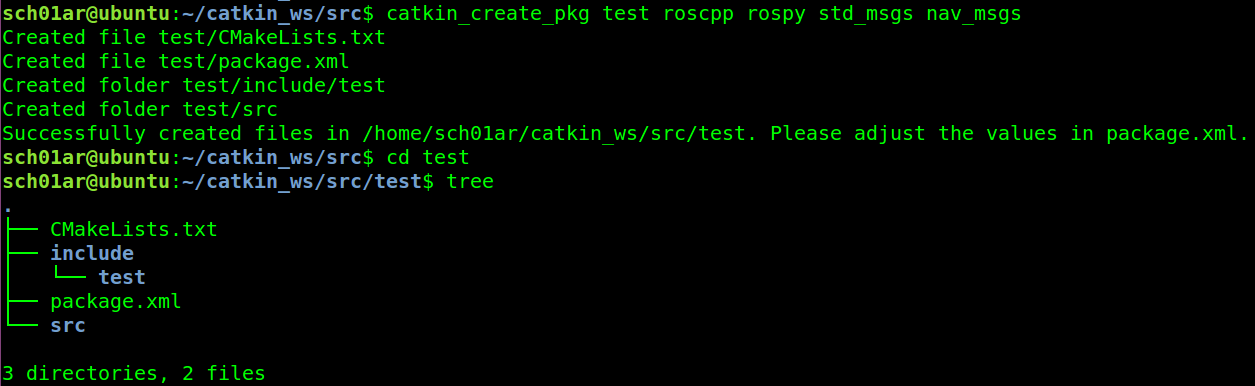
std_msgs 为通信的依赖,nav_msgs 为导航的依赖
查找某个 package 的地址:rospack find package_name

列出本地所有的 package:rospack list
sch01ar@ubuntu:~$ rospack list
跳转到某个 package 路径下:roscd package_name

列举某个 package 下的文件信息:rosls package_name

编辑 package 中的文件:rosed package_name file_name
sch01ar@ubuntu:~$ rosed test CMakeLists.txt
安装某个 package 所需的依赖:rosdep install [package_name]

catkin 工作空间 - Package 组成的更多相关文章
- ROS学习笔记一(ROS的catkin工作空间)
在安装完成ROS indigo之后,需要查看环境变量是否设置正确,并通过创建一个简单的实例来验证ROS能否正常运行. 1 查看环境变量 在ROS的安装过程中,我们执行了如下命令:(此命令就是向当前用户 ...
- catkin 工作空间
catkin 工作空间:组织和管理功能包的文件夹,以 catkin 工具编译 建立工作空间 sch01ar@ubuntu:~$ mkdir -p ~/catkin_ws/src sch01ar@ubu ...
- ROS-3 : Catkin工作空间和ROS功能包
一.创建一个Catkin工作空间 步骤一:构建catkin工作空间 安装完成ROS版本后,设置好环境变量:$ source /opt/ros/kinetic/setup.bash.然后即可创建一个ca ...
- AR Drone系列之:使用ROS catkin创建package并使用cv_bridge实现对ar drone摄像头数据的处理
1 开发环境 Ubuntu 12.04 ROS Hydro 2 前提 可參考这篇blog:http://blog.csdn.net/yake827/article/details/44564057 b ...
- 创建一个catkin工作空间
先确定自己的环境变量是否设置正确 export | grep ROS 若出现如下的,说明是正确的 declare -x ROSLISP_PACKAGE_DIRECTORIES="" ...
- 在工作空间中构建和使用catkin包
在这篇博客中将会介绍,如何在工作空间中构建和使用一个包. 首先,我们来看一下如何在catkin工作空间中,使用catkin_make工具从源文件构建和安装一个包.使用catkin_make来构建一个c ...
- ROS创建工作空间(三)
查看正在使用的ROS工作空间,使用命令 echo $ROS_PACKAGE_PATH 我新建了两个
- ROS工作空间和程序包创建
预备工作后面操作中我们将会用到ros-tutorials程序包,请先安装: $ sudo apt-get install ros-<distro>-ros-tutorials 将 < ...
- ROS学习(四)—— 创建ROS Package
一.caktin Package的组成 1.必须含有 package.xml文件,提供有关程序包的元信息 2.必须含有一个catkin版本的 CmakeLists.txt文件,如果是一个catkin元 ...
随机推荐
- WSL安装xfce4
参考:https://github.com/Microsoft/WSL/issues/637 安装组件 1. win10 上安装 Xming https://sourceforge.net/proje ...
- JAVA Eclipse 快捷键
一. 最常见的: a) 内容提示:Alt + / b) 快速修复:Ctrl + 1 c) 导包:Ctrl + shift + O d) 格式化代码块 ...
- 【Python】序列的方法
任何序列都可以引用其中的元素(item). 下面的内建函数(built-in function)可用于列表(表,定值表,字符串) #s为一个序列 len(s) 返回: 序列中包含元素的个数 min(s ...
- oracle 常用的系统表查询
(转自:http://blog.csdn.net/marshalchen/article/details/6552103) select * from user_tab_cols where colu ...
- flask_sqlalchemy + sqlite 的一系列使用方法
如何使用在官网上有详细记录 :http://flask-sqlalchemy.pocoo.org/2.3/ 作为项目笔记,简单阐述使用方法: 1.创建flask_sqlalchemy基于sqlite的 ...
- C#学习历程(一)[基础概念]
#小摘要 >> boolean和bool差不多是一个东西,但是bool是一个基本值的类型,boolean则是对象(java与javascript中有用). Bool是Boolean的别名. ...
- ArrayList、Vector、LinkedList(jdk8)
一.ArrayList分析 1.类和构造方法 public class ArrayList<E> extends AbstractList<E> //可以看到其父类是Abstr ...
- React 实现 Table 的思考
琼玖 1 年前 (写的零零散散, 包括github不怎么样) Table 是最常用展示数据的方式之一,可是一个产品中往往很多非常类似的 Table, 但是我们碰到的情况往往是 Table A 要排序, ...
- C#中upd分包与发送,已经实现全部代码
using System; using System.Collections.Generic; using System.Linq; using System.Text; namespace Tool ...
- HDU - 6201:transaction transaction transaction(最长路)
Kelukin is a businessman. Every day, he travels around cities to do some business. On August 17th, i ...