Projects\image_match3图像特征匹配调试记录
D:\文件及下载相关\文档\Visual Studio \Projects\image_match3\image_match
#include "opencv2/core/core.hpp"
#include "highgui.h"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/legacy/legacy.hpp" using namespace cv;
using namespace std; int main(int argc, char** argv)
{
//待匹配的两幅图像,其中img1包括img2,也就是要从img1中识别出img2
//Mat img1 = imread("book_in_scene.png");
//Mat img2 = imread("book2.png");
Mat img1 = imread("003.png");
Mat img2 = imread("004.png"); Mat image01;
Mat image02;
cvtColor(img1,image01,CV_RGB2GRAY);
cvtColor(img2,image02,CV_RGB2GRAY);
SIFT sift1, sift2; vector<KeyPoint> key_points1, key_points2; Mat descriptors1, descriptors2, mascara; sift1(img1,mascara,key_points1,descriptors1);
sift2(img2,mascara,key_points2,descriptors2); //实例化暴力匹配器——BruteForceMatcher
BruteForceMatcher<L2<float>> matcher;
//定义匹配器算子
vector<DMatch>matches;
//实现描述符之间的匹配,得到算子matches
matcher.match(descriptors1,descriptors2,matches); //提取出前3个最佳匹配结果
nth_element(matches.begin(), //匹配器算子的初始位置
matches.begin()+, // 排序的数量
matches.end()); // 结束位置
//剔除掉其余的匹配结果
matches.erase(matches.begin()+, matches.end()); namedWindow("SIFT_matches");
Mat img_matches;
//在输出图像中绘制匹配结果
drawMatches(img1,key_points1, //第一幅图像和它的特征点
img2,key_points2, //第二幅图像和它的特征点
matches, //匹配器算子
img_matches, //匹配输出图像
Scalar(,,)); //用白色直线连接两幅图像中的特征点
imshow("SIFT_matches",img_matches); vector<Point2f> imagePoints1,imagePoints2;
for(int i=;i<;i++)
{
imagePoints1.push_back(key_points1[matches[i].queryIdx].pt);
imagePoints2.push_back(key_points2[matches[i].trainIdx].pt);
} Mat homo=findHomography(imagePoints1,imagePoints2,CV_RANSAC);
////也可以使用getPerspectiveTransform方法获得透视变换矩阵,不过要求只能有4个点,效果稍差
//Mat homo=getPerspectiveTransform(imagePoints1,imagePoints2);
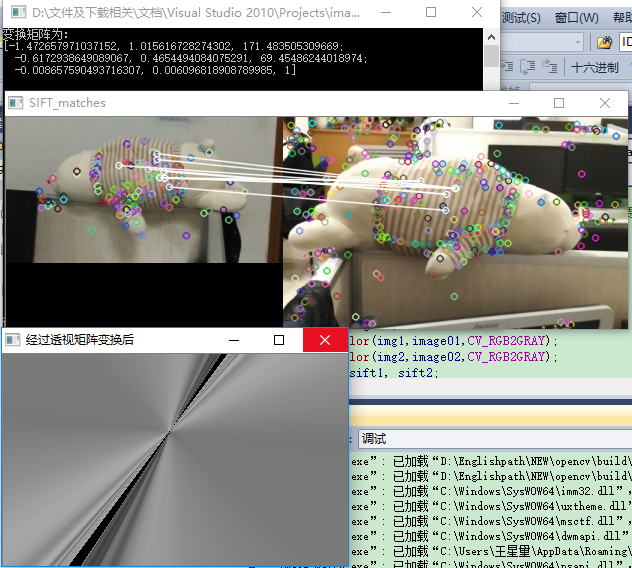
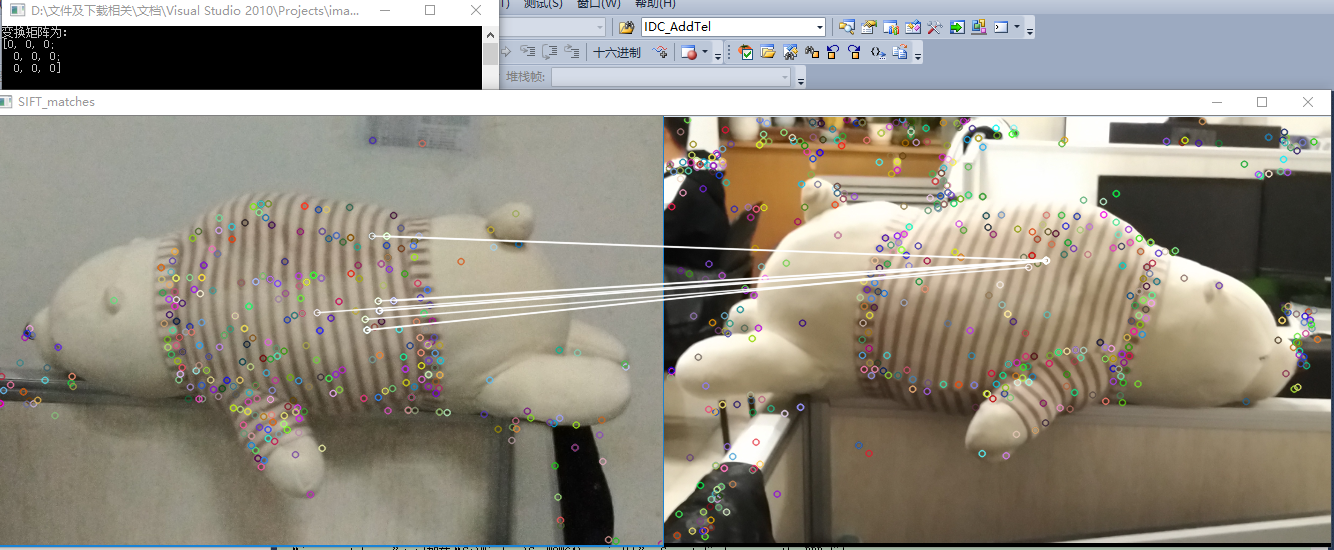
cout<<"变换矩阵为:\n"<<homo<<endl<<endl;//输出映射矩阵
//图像配准
Mat imageTransform1,imageTransform2;
warpPerspective(image01,imageTransform1,homo,Size(image02.cols,image02.rows));
imshow("经过透视矩阵变换后",imageTransform1);
waitKey(); return ;
}
Mat img1 = imread("003.png");
Mat img2 = imread("004.png");
测试两个方向拍摄的熊娃娃:
对海面舰船目标的MUSIC高精度定位方法研究(图文) - 期刊论文网 http://www.pinjiao.com/lunwenqikan/kejixiaolunwen/lunwen21906.html
Projects\image_match3图像特征匹配调试记录的更多相关文章
- 图像特征匹配,sift,surf法
今天想把这一段时间做的一些工作做个总结,望能帮到大家,尊重原创作品,转摘请注明原创地址:http://www.cnblogs.com/ggYYa/p/7902900.html,在此感谢!
- OpenCV探索之路(二十三):特征检测和特征匹配方法汇总
一幅图像中总存在着其独特的像素点,这些点我们可以认为就是这幅图像的特征,成为特征点.计算机视觉领域中的很重要的图像特征匹配就是一特征点为基础而进行的,所以,如何定义和找出一幅图像中的特征点就非常重要. ...
- OpenCV2:特征匹配及其优化
在OpenCV2简单的特征匹配中对使用OpenCV2进行特征匹配的步骤做了一个简单的介绍,其匹配出的结果是非常粗糙的,在这篇文章中对使用OpenCV2进行匹配的细化做一个简单的总结.主要包括以下几个内 ...
- OpenCV2简单的特征匹配
特征的匹配大致可以分为3个步骤: 特征的提取 计算特征向量 特征匹配 对于3个步骤,在OpenCV2中都进行了封装.所有的特征提取方法都实现FeatureDetector接口,DescriptorEx ...
- 特征提取(Detect)、特征描述(Descriptor)、特征匹配(Match)的通俗解释
特征匹配(Feature Match)是计算机视觉中很多应用的基础,比如说图像配准,摄像机跟踪,三维重建,物体识别,人脸识别,所以花一些时间去深入理解这个概念是不为过的.本文希望通过一种通俗易懂的方式 ...
- OPENCV图像特征点检测与FAST检测算法
前面描述角点检测的时候说到,角点其实也是一种图像特征点,对于一张图像来说,特征点分为三种形式包括边缘,焦点和斑点,在OPENCV中,加上角点检测,总共提供了以下的图像特征点检测方法 FAST SURF ...
- (三)ORB特征匹配
ORBSLAM2匹配方法流程 在基于特征点的视觉SLAM系统中,特征匹配是数据关联最重要的方法.特征匹配为后端优化提供初值信息,也为前端提供较好的里程计信息,可见,若特征匹配出现问题,则整个视觉SLA ...
- 第十六节、基于ORB的特征检测和特征匹配
之前我们已经介绍了SIFT算法,以及SURF算法,但是由于计算速度较慢的原因.人们提出了使用ORB来替代SIFT和SURF.与前两者相比,ORB有更快的速度.ORB在2011年才首次发布.在前面小节中 ...
- 原来CNN是这样提取图像特征的。。。
对于即将到来的人工智能时代,作为一个有理想有追求的程序员,不懂深度学习(Deep Learning)这个超热的领域,会不会感觉马上就out了?作为机器学习的一个分支,深度学习同样需要计算机获得强大的学 ...
随机推荐
- Android_WebView_全屏
WebView(网络视图)能加载显示网页,能够将其视为一个浏览器. 它使用了WebKit渲染引擎加载显示网页,实现WebView有下面两种不同的方法: 第一种方法的步骤: 1.在要Activity中实 ...
- 新建 jsp异常,The superclass "javax.servlet.http.HttpServlet" was not found on the Java Build Path
新项目,新建jsp页面的时候报异常: Multiple annotations found at this line: - The superclass "javax.servlet.htt ...
- 【转】C# 视频监控系列(12):H264播放器——播放录像文件
原文地址:http://www.cnblogs.com/over140/archive/2009/03/23/1419643.html?spm=5176.100239.blogcont51182.16 ...
- ASP.NET 之XML:要插入的节点出自不同的文档上下文
异常详细信息: System.ArgumentException: 要插入的节点出自不同的文档上下文. 产生状况:现在有两个xml文件,我想把这两个xml合并,在给xml节点插入一个子节点时出 ...
- CSDN开源夏令营 百度数据可视化实践 ECharts(8)
(1)前言 首先谢谢林峰老师,继续接着第七篇提到的内容.CSS布局确实非常累,感觉不好看了就的调整,总的看起来的高大上嘛.好了废话不再多说.今天主要就先解说一个页面的内容,对于CSS布局后面讲会具体的 ...
- 【转载】Hibernate 关联关系
http://www.cnblogs.com/whgk/category/910622.html
- js 时间对比
https://www.cnblogs.com/xiangsj/p/7977325.html http://www.jb51.net/article/45560.htm isOverdue (time ...
- spring和hibernate整合,事务管理
一.spring和hibernate整合开发步骤 1 引入jar文件,用户libarary列表如下 //spring_core spring3..9core\commons-logging-1.2.j ...
- php get_called_class()函数与get_class函数的区别
get_class (): 获取当前调用方法的类名: get_called_class():获取静态绑定后的类名: 有例为证: class Foo{ public function test(){ v ...
- unity, read text file
using System.IO; //test read txt //Resources.Load(...) loads an asset stored at path in a Res ...