OpenCV(5)-图像掩码操作(卷积)-锐化
锐化概念
图像平滑过程是去除噪声的过程。图像的主要能量在低频部分,而噪声主要集中在高频部分。图像的边缘信息主要也在高频部分,在平滑处理后,将会丢不部分边缘信息。因此需要使用锐化技术来增强边缘。
平滑处理的本质是图像经过平均或积分运算,锐化进行逆运算(如微分)即可。微分运算是求信号变化频率,可以增强高频分量的作用。在对图像进行锐化处理前要确定图像有较高的信噪比,否则处理后的图像增加的噪声比信号多。
常用的微分运算有一阶微分和二阶微分。一阶微分
\]
二阶微分
\]
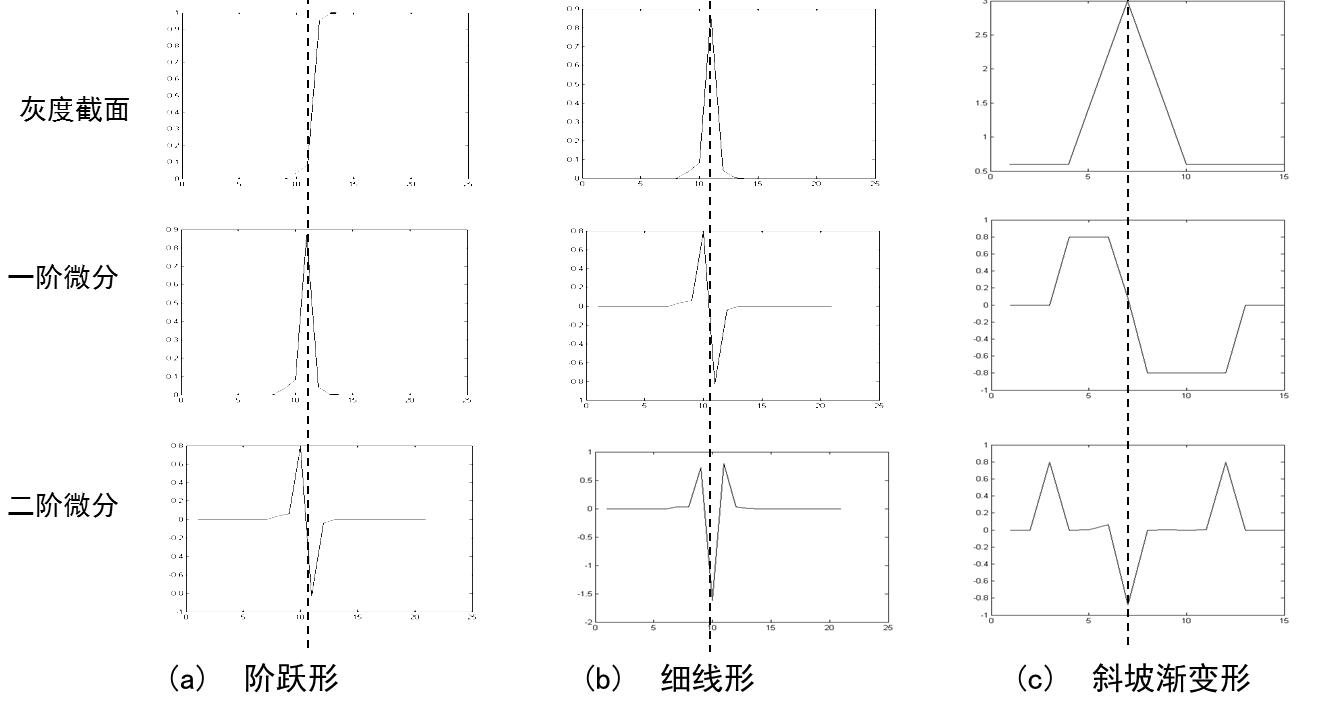
一阶微分特点:
1、平坦段为0
2、灰度阶梯和斜坡起始点为非0
3、斜坡面为非0
二阶微分特点:
1、平坦段为0
2、灰度阶梯和斜坡起始、终止处为非0
3、沿着常数斜率斜坡段为0
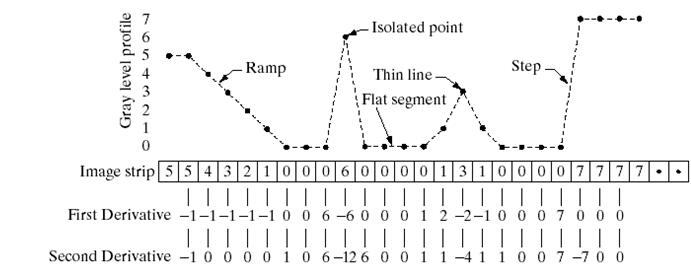
可以看出:
1、一阶微分能产生比较宽的边缘(沿斜坡很长一段为非0),而二阶微对细节更敏感(如细线、孤立点、斜坡起始点不为0)。
2、一阶微分都灰度阶跃反应强烈;二阶微分对灰度阶梯变换产生双相应(阶跃点两边都不为0)。
3、在大多数图像增强应用中,二阶微分效果好过一阶微分。
图像微分定义
图像数据是离散数据,用差分代替微分
x方向
\]
y方向
\]
其模和方向
\]
\]
同理,可以得到二阶微分(差分公式)
x方向
\]
y方向
\]
其模和方向
\]
\]
单方向一阶微分锐化
单方向一阶微分锐化是指锐化某一方向的边缘。最简单的就是锐化水平方向和垂直方向。
锐化水平方向
\begin{matrix}
1 & 1 & 1 \\
0& 0 & 0 \\
-1 & -1 & -1
\end{matrix}
\right] \tag{3}
\]
锐化垂直方向
\begin{matrix}
1 &0 & -1 \\
1& 0 & -1 \\
1 & 0 & -1
\end{matrix}
\right] \tag{3}
\]
锐化后可能出现像素值为负,这处理方法有:
(1):所有像素值统一加上一个值。这样处理效果类似浮雕。
(2):所有像素取绝对值,这样可以有效提取边缘。
实验:
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main(int argc, char* argv[]){
const char* path = "";
Mat img = imread(path);
if (img.empty())
{
cout << "error";
return -1;
}
imshow("原图像", img);
//水平方向边缘提取
Mat h_kern = (Mat_<float>(3, 3) << 1, 1, 1,
0, 0, 0,
-1, -1, -1);
Mat h_mat;
filter2D(img, h_mat, img.depth(), h_kern);
imshow("水平方向边缘提取", h_mat);
Mat v_kern = (Mat_<float>(3, 3) << 1, 0, -1,
1, 0, -1,
1, 0, -1);
Mat v_mat;
filter2D(img, v_mat, img.depth(), v_kern);
imshow("线性非均值滤波2", v_mat);
waitKey();
return 0;
}
无方向一阶微分锐化
对于有规则的物体,单方向锐化有比较好的效果,但是对于不规则物体,常常需要无方向一节锐化。
交叉微分(Roberts算法)
\]
\begin{matrix}
-1 & 0 \\
0 & 1
\end{matrix}
\right] \tag{3}
\]
\begin{matrix}
0 & 1 \\
-1 & 0
\end{matrix}
\right] \tag{3}
\]
Sobel锐化
\]
\begin{matrix}
-1 & -2 & -1 \\
0 & 0 & 0\\
1& 2 & 1
\end{matrix}
\right] \tag{3}
\]
\begin{matrix}
-1 & 0 & 1 \\
-2 & 0 & 2\\
-1& 0 & 1
\end{matrix}
\right] \tag{3}
\]
OpenCV函数
void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize=3, double scale=1, double delta=0, int borderType=BORDER_DEFAULT )
Priwitt锐化
\]
\begin{matrix}
-1 & -1 & -1 \\
0 & 0 & 0\\
1& 1 & 1
\end{matrix}
\right] \tag{3}
\]
\begin{matrix}
-1 & 0 & 1 \\
-1 & 0 & 1\\
-1& 0 & 1
\end{matrix}
\right] \tag{3}
\]
实验
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main(int argc, char* argv[]){
const char* path = "";
Mat img = imread(path);
if (img.empty())
{
cout << "error";
return -1;
}
imshow("原图像", img);
/****************************Roberts**************************/
Mat Roberts_kern_x = (Mat_<float>(2, 2) << -1, 0,
0, 1);
Mat Roberts_kern_y = (Mat_<float>(2, 2) << 0, 1,
- 1, 0);
Mat Roberts_Mat_x, Roberts_Mat_y, Roberts_Mat;
filter2D(img, Roberts_Mat_x, img.depth(), Roberts_kern_x);
filter2D(img, Roberts_Mat_y, img.depth(), Roberts_kern_y);
Mat Roberts_abs_x, Roberts_abs_y;
convertScaleAbs(Roberts_Mat_x, Roberts_abs_x);
convertScaleAbs(Roberts_Mat_y, Roberts_abs_y);
addWeighted(Roberts_abs_x, 0.5, Roberts_abs_y, 0.5, 0, Roberts_Mat);
imshow("Roberts", Roberts_Mat);
/****************************Roberts**************************/
/****************************Sobel**************************/
Mat Sobel_Mat_x, Sobel_Mat_y, Sobel_Mat;
Sobel(img, Sobel_Mat_x, img.depth(), 1, 0);
Sobel(img, Sobel_Mat_y, img.depth(), 0, 1);
convertScaleAbs(Sobel_Mat_x, Sobel_Mat_x);
convertScaleAbs(Sobel_Mat_y, Sobel_Mat_y);
addWeighted(Sobel_Mat_x, 0.5, Sobel_Mat_y, 0.5, 0, Sobel_Mat);
imshow("Sobel", Sobel_Mat);
/****************************Sobel**************************/
/****************************Priwitt**************************/
Mat Priwitt_kern_x = (Mat_<float>(3, 3) << -1, -1, -1, 0, 0, 0, 1, 1, 1);
Mat Priwitt_kern_y = (Mat_<float>(3, 3) << -1, 0, 1, -1, 0, 1, -1, 0, 1);
Mat Priwitt_Mat_x, Priwitt_Mat_y, Priwitt_Mat;
filter2D(img, Priwitt_Mat_x, img.depth(), Priwitt_kern_x);
filter2D(img, Priwitt_Mat_y, img.depth(), Priwitt_kern_y);
convertScaleAbs(Priwitt_Mat_x, Priwitt_Mat_x);
convertScaleAbs(Priwitt_Mat_y, Priwitt_Mat_y);
addWeighted(Priwitt_Mat_x, 0.5, Priwitt_Mat_y, 0.5, 0, Priwitt_Mat);
imshow("Peiwitt", Priwitt_Mat);
waitKey();
return 0;
}
结论:
Roberts算法的模板为2 * 2,提取边缘能力较弱。
Sobel算法与Priwitt算法的模板大小相同,属于同一类型,因此处理效果基本相同。
二阶微分锐化
有些灰度特性,一阶微分并不能有效提取,这时需要二阶微分
\]
\]
\]
对应矩阵
\begin{matrix}
0 & -1 & 0 \\
-1 & 4 & -1\\
0& -1 &0
\end{matrix}
\right] \tag{3}
\]
上面矩阵即为Laplacian算子。Laplacian算子还有变形
Laplacian算子
\begin{matrix}
-1 & -1 & -1 \\
-1 & 8 & -1\\
-1& -1 & -1
\end{matrix}
\right] \tag{3}
\]
\begin{matrix}
1 & -2 & 1 \\
-2 & 4 & -2\\
1& -2 & 1
\end{matrix}
\right] \tag{3}
\]
\begin{matrix}
0 & -1 & 0 \\
-1 & 5 & -1\\
0& -1 & 0
\end{matrix}
\right] \tag{3}
\]
上面几个算子,\(H_1\)和\(H_2\)效果接近,\(H_3\)效果比较差,\(H_4\)相加后为1,接近原图。
Wallis算子
在处理时,加入对数处理过程。
\]
在前面的算法公式中注意以下几点:
1)为了防止对0取对数,计算时实际上是用log(f(i, j) + 1);
2)因为对数值很小log(256) = 5.45, 所以计算
时用46*log(f(i, j) + 1)。
(46 = 255 / log(256))
高斯-拉普拉斯算子
Laplacian算子对噪声很敏感,所以在进行锐化之前,需要先对图像进行平滑,减小噪声影响。高斯拉普拉斯算子将平滑和锐化结合在一起,适应了上面的需求。
OpenCV(5)-图像掩码操作(卷积)-锐化的更多相关文章
- OpenCV(4)-图像掩码操作(卷积)--平滑处理
卷积定义 矩阵的掩码操作即对图像进行卷积.对图像卷积操作的意义为:邻近像素对(包括该像素自身)对新像素的影响:影响大小取决于卷积核对应位置值得大小. 例如:图像增强可以使用 \[ I(i,j)=5*I ...
- opencv——图像掩码操作
使用opencv通过掩码去扣取图像中感兴趣的区域 步骤: 1.读取一张图片 2.转换颜色格式为hsv 3.设置要扣取区域颜色的上下门限 4.从原始图像中获取感兴趣区域的掩码 5.使用掩码和原始图像做云 ...
- OpenCV中图像算术操作与逻辑操作
OpenCV中图像算术操作与逻辑操作 在图像处理中有两类最重要的基础操作各自是图像点操作与块操作.简单点说图像点操作就是图像每一个像素点的相关逻辑与几何运算.块操作最常见就是基于卷积算子的各种操作.实 ...
- OpenCV学习笔记:矩阵的掩码操作
矩阵的掩码操作很简单.其思想是:根据掩码矩阵(也称作核)重新计算图像中每个像素的值.掩码矩阵中的值表示近邻像素值(包括该像素自身的值)对新像素值有多大影响.从数学观点看,我们用自己设置的权值,对像素邻 ...
- Opencv中图像的遍历与像素操作
Opencv中图像的遍历与像素操作 OpenCV中表示图像的数据结构是cv::Mat,Mat对象本质上是一个由数值组成的矩阵.矩阵的每一个元素代表一个像素,对于灰度图像,像素是由8位无符号数来表示(0 ...
- opencv图像阈值操作
使用threshold方法和adaptivethreshold方法对图像进行阈值分割操作. 1.使用threshold方法,设置一个阈值,将大于阈值的值变换为最大值,小于阈值的值变换为0. #-*- ...
- 【图像处理】OpenCV+Python图像处理入门教程(七)图像形态学操作
图像形态学主要从图像内提取分量信息,该分量信息通常对表达图像的特征具有重要意义.例如,在车牌号码识别中,能够使用形态学计算其重要特征信息,在进行识别时,只需对这些特征信息运算即可.图像形态学在目标视觉 ...
- 13、OpenCV实现图像的空间滤波——图像平滑
1.空间滤波基础概念 1.空间滤波基础 空间滤波一词中滤波取自数字信号处理,指接受或拒绝一定的频率成分,但是空间滤波学习内容实际上和通过傅里叶变换实现的频域的滤波是等效的,故而也称为滤波.空间滤波主要 ...
- OpenCV在矩阵上的卷积
转载请注明出处!!!http://blog.csdn.net/zhonghuan1992 OpenCV在矩阵上的卷积 在openCV官网上说是戴面具,事实上就是又一次计算一下矩阵中的每个value,那 ...
随机推荐
- linux 内存管理——内核的shmall 和shmmax 参数
内核的 shmall 和 shmmax 参数 SHMMAX= 配置了最大的内存segment的大小 ------>这个设置的比SGA_MAX_SIZE大比较好. SHMMIN= 最小的内存seg ...
- Storm系列(十九)普通事务ITransactionalSpout及示例
普通事务API详解 1 _curtxid:" + _curtxid 46 + ",_tx.getTransactionId():&qu ...
- Windows下使用GCC编译器
1.GCC编译器的选择 Windows下最常见的安装GCC的方式有两种:Cygwin和MinGW.本文主要介绍MinGW的安装配置. 2.下载MinGW 下载地址:http://sourceforge ...
- C++ Primer 练习7.32(C++ Primer读书笔记)
第七章 类 练习7.32 定义你自己的Screen和Window_mgr,其中clear是Window_mgr的成员,是Screen的友元. 由于Window_mgr中含有Screen对象,所以在W ...
- 用lambda构建ORM查询语句
本文介绍如何解析lambda表达式来获取一个满足条件的查询语句. 先看个截图 通过设置实体对象Article_Content的查询表达式,就可以获取对应的参数化SQL语句,使用起来很方便,减少了代码 ...
- Java异常处理的误区和经验总结
本文着重介绍了 Java 异常选择和使用中的一些误区,希望各位读者能够熟练掌握异常处理的一些注意点和原则,注意总结和归纳.只有处理好了异常,才能提升开发人员的基本素养,提高系统的健壮性,提升用户体验, ...
- 洛谷P1471 方差
蒟蒻HansBug在一本数学书里面发现了一个神奇的数列,包含N个实数.他想算算这个数列的平均数和方差. ——by 洛谷; http://www.luogu.org/problem/show?pid=1 ...
- iOS 火星坐标相关整理及解决方案汇总(转)
这几天在处理定位相关的代码,彻彻底底的被火星坐标恶心到了. 恶心列表 从 CLLocationManager 取出来的经纬度放到 mapView 上显示,是错的! 从 CLLocationManage ...
- 同步窗体移动 FormMove
方法2 unit Unit1;interfaceuses Winapi.Windows, Winapi.Messages, System.SysUtils, System.Variants, Sy ...
- MongoDB的地埋空间数据存储、空间索引以及空间查询
一.关于MongoDB 在众多NoSQL数据库,MongoDB是一个优秀的产品.其官方介绍如下: MongoDB (from "humongous") is a scalable, ...