Coursera self-driving2, State Estimation and Localization Week4, LIDAR
operating principles 工作原理
Velodyne 加州,Hokuyo 日本,SICK 德国
TOF 就是用发出去收到的时间差和光速算距离
basic LIDAR models (2D, 3D)
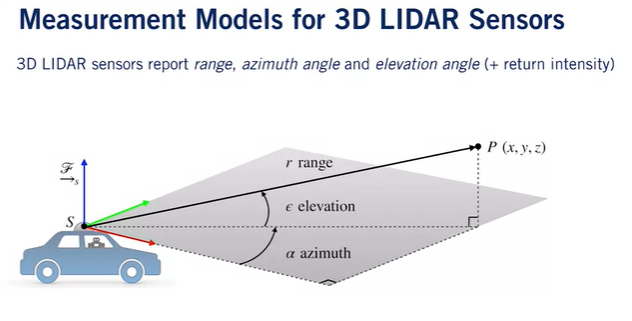
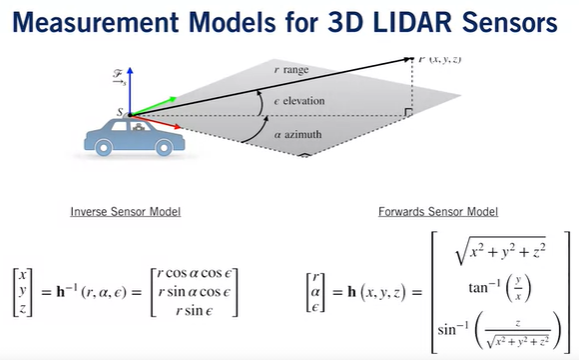
球面坐标系和笛卡尔直角坐标系的转化:
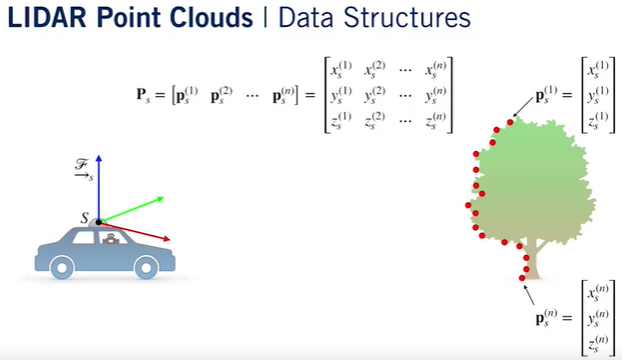
cloud point 点云
1. 点云数据结构
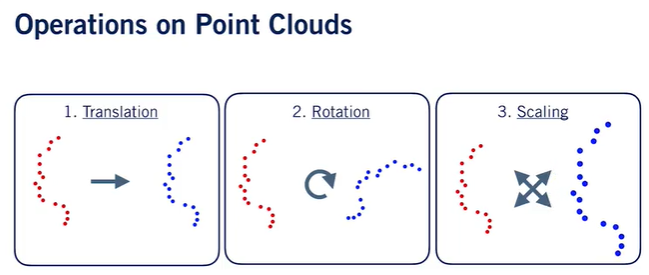
2. 点云空间操作
translation, rotation, scaling, plane-fitting (主要用来识别路面,拿点云来拟合路面的平面,用最小二乘法)
localization via point cloud registration
pose estimation via point cloud data - 也就是解决 cloud set registration problem
1. 什么是 cloud set registration problem? 怎样用来做state estimation?
2. Iterative Closest Point (ICP) algo
在图像领域,有特征匹配算法来匹配对应点,针对点云可以用ICP算法。基本思想就是用两次点云数据的变化来推出motion是怎么变化的, 但是对移动物体来说可能造成激光的测距不变(同样速度下),这样就误认为是静止的. 这个问题可以通过 Robust cost function 来减弱影响,也可以通过和GPS sersor 信息做 sersor fusing.
ICP有两种 Point-to-Point ICP, 和 Point-to-Plain ICP
Coursera self-driving2, State Estimation and Localization Week4, LIDAR的更多相关文章
- State Estimation for Robotics (Tim Barfoot) exercises Answers
Here are some exercises answers for State Estimation for Robotics, which I did in June, 2017. The bo ...
- Coursera, Deep Learning 4, Convolutional Neural Networks - week4,
Face recognition One Shot Learning 只看一次图片,就能以后识别, 传统deep learning 很难做到这个. 而且如果要加一个人到数据库里面,就要重新train ...
- state estimation for robotics-1
概率论是探讨SLAM的一个重要的工具,概率密度函数的概率意义在于它能够描述一个随机变量位于任意区间的概率. p(x<=x<=x+dx)≍p(x).dx(由拉格朗日中值定理)
- A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehicles in GPS-Denied Environments
A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehi ...
- SLAMCN资料收藏转载
网页链接地址:http://www.slamcn.org/index.php/%E9%A6%96%E9%A1%B5 资料非常丰富,内容如下: 首页 目录 [隐藏] 1 SLAM 介绍 1.1 什么是 ...
- SLAM(二)----学习资料下载
有位师兄收集了很多slam的学习资料, 做的很赞, 放到了github上, 地址:https://github.com/liulinbo/slam.git ruben update 0823 2016 ...
- 粒子滤波跟踪移动机器人(MATLAB Robotics System Toolbox)
MathWorks从MATLAB 2015a开始推出与ROS集成的Robotics System Toolbox(机器人系统工具箱),它为自主移动机器人的研发提供现成的算法和硬件接口. 粒子滤波基本流 ...
- 相机-imu外参校准总结
1. 研究背景及相关工作 1)研究背景 单目视觉惯性slam是一种旨在跟踪移动平台的增量运动并使用来自单个车载摄像头和imu传感器的测量结果同时构建周围环境地图的技术.视觉相机和惯性测量单元(imu) ...
- 1.SJ-SLAM-14
1.引言 SLAM:Simultaneous Localization and Mapping 同时定位与地图构建 搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估 ...
- 三维视觉、SLAM方向全球顶尖实验室汇总
本文作者 任旭倩,公众号:计算机视觉life,编辑成员 欧洲 英国伦敦大学帝国理工学院 Dyson 机器人实验室 http://www.imperial.ac.uk/dyson-robotics-la ...
随机推荐
- c 语言学习第三天
字符和字符串 字符 当我们定义了一个字符变量 c 为a时,打印的时候让它使整数形式显示.会出现怎么一个情况? #include<stdio.h> int main(){ char c = ...
- C#——接口
先来看看微软官方对接口的定义与说明. 接口定义协定. 实现接口的类或结构必须遵循它的协定. 接口可以从多个基接口继承,类或结构可以实现多个接口. 接口可以包含方法.属性.事件和索引器. 接口本身不提供 ...
- elementplus django drf 如何做到确认单据禁止删除
elementplus django drf 如何做到确认单据禁止删除 要在Django和Django Rest Framework(DRF)中实现禁止删除确认单据的功能,你可以通过以下步骤来 ...
- oeasy教您玩转vim - 66 - # 比较修改模式 vimdiff
vimdiff 回忆上次 上次有三种批量替换,分别是 :windo :bufdo :argdo 执行的{cmd}可以用|按顺序增加 update 自动更新 :set autowrite 自动写入 ...
- 数据仓库建模工具之一——Hive学习第三天
1.Hive的基本操作 1.1 Hive库操作 1.1.1 创建数据库 1)创建一个数据库,数据库在HDFS上的默认存储路径是/hive/warehouse/*.db. create database ...
- 解决react native打包apk文件安装好之后进入应用闪退的问题
这个是我一个前端前辈帮我弄的,自己解决的时候不行,她去官网找了相关的问题,然后发给我的. react-native android 的release安装包运行闪退,但是debug运行正常 环境:0.6 ...
- 【工具】SpringBoot项目如何查看某个maven依赖是否存在以及依赖链路
当我在SpringBoot项目中想加个依赖,但是不确定现有依赖的依赖的依赖.....有没有添加过这个依赖,怎么办呢?如果添加过了但是不知道我需要的这个依赖属于哪个依赖的下面,怎么查呢? IDEA中提供 ...
- python统计班级学生
python统计班级学生 如下场景: 假设我有一个学生类和一个班级类,想要实现的功能为: 执行班级人数增加的操作.获得班级的总人数: 学生类继承自班级类,每实例化一个学生,班级人数都能增加 ...
- 探索Amazon S3:存储解决方案的基石(Amazon S3使用记录)
探索Amazon S3:存储解决方案的基石 本文为上一篇minio使用的衍生版 相关链接:1.https://www.cnblogs.com/ComfortableM/p/18286363 2.h ...
- 【Layui】10 颜色选择器 ColorPicker
文档地址: https://www.layui.com/demo/colorpicker.html 常规选择器: <fieldset class="layui-elem-field l ...