一起做RGB-D SLAM (2)
第二讲 从图像到点云
本讲中,我们将带领读者,编写一个将图像转换为点云的程序。该程序是后期处理地图的基础。最简单的点云地图即是把不同位置的点云进行拼接得到的。
当我们使用RGB-D相机时,会从相机里读到两种数据:彩色图像和深度图像。如果你有Kinect和ros,可以运行:
roslaunch openni_launch openni.launch
使Kinect工作。随后,如果PC连接上了Kinect,彩色图像与深度图像就会发布在 /camera/rgb/image_color 和 /camera/depth_registered/image_raw 中。你可以通过:
rosrun image_view image_view image:=/camera/rgb/image_color
来显示彩色图像。或者,你也可以在Rviz里看到图像与点云的可视化数据。
小萝卜:可是师兄!我现在手边没有Kinect,该怎么办啊!
师兄:没关系!你可以下载我们给你提供的数据。实际上就是下面两张图片啦!

小萝卜:怎么深度图是一团黑的呀!
师兄:请睁大眼睛仔细看!怎么可能是黑的!
小萝卜:呃……可是确实是黑的啊!
师兄:对!这是由于画面里的物体离我们比较近,所以看上去比较黑。但是你实际去读的话可是有数据的哦!
重要的备注:
- 这两张图来自于nyuv2数据集:http://cs.nyu.edu/~silberman/datasets/ 原图格式是ppm和pgm的,被我转成了png格式(否则博客园不让传……)。
- 你可以直接另存为这两个图,也可以到我的git里面获取这两个图。
- 实际Kinect里(或其他rgb-d相机里)直接采到的RGB图和深度图可能会有些小问题:
- 有一些时差(约几到十几个毫秒)。这个时差的存在,会产生“RGB图已经向右转了,怎么深度图还没转”的感觉哦。
- 光圈中心未对齐。因为深度毕竟是靠另一个相机获取的,所以深度传感器和彩色传感器参数可能不一致。
- 深度图里有很多“洞”。因为RGB-D相机不是万能的,它有一个探测距离的限制啦!太远或太近的东西都是看不见的呢。关于这些“洞”,我们暂时睁一只眼闭一只眼,不去理它。以后我们也可以靠双边bayes滤波器去填这些洞。但是!这是RGB-D相机本身的局限性。软件算法顶多给它修修补补,并不能完全弥补它的缺陷。
不过请你放心,在我们给出的这两个图中,都进行了预处理。你可以认为“深度图就是彩色图里每个像素距传感器的距离”啦!
师兄:现在,我们要把这两个图转成点云啦,因为计算每个像素的空间点位置,可是后面配准、拼图等一系列事情的基础呢。比如,在配准时,必须知道特征点的3D位置呢,这时候就要用到我们这里讲到的知识啦!
小萝卜:听起来很重要的样子!
师兄:对!所以请读者朋友务必掌握好这部分的内容啦!
从2D到3D(数学部分)
上面两个图像给出了机器人外部世界的一个局部的信息。假设这个世界由一个点云来描述:$X=\{ x_1, \ldots, x_n \}$. 其中每一个点呢,有 $r,g,b,x,y,z$一共6个分量,表示它们的颜色与空间位置。颜色方面,主要由彩色图像记录; 而空间位置,可以由图像和相机模型、姿态一起计算出来。
对于常规相机,SLAM里使用针孔相机模型(图来自http://www.comp.nus.edu.sg/~cs4243/lecture/camera.pdf ):

$$ u = \frac{ x \cdot f_x }{z} + c_x $$
$$ v = \frac{ y \cdot f_y }{z} + c_y $$
$$ d = z \cdot s $$
其中,$f_x, f_y$指相机在$x,y$两个轴上的焦距,$c_x, c_y$指相机的光圈中心,$s$指深度图的缩放因子。
小萝卜:好晕啊!突然冒出这么多个变量!
师兄:别急啊,这已经是很简单的模型了,等你熟悉了就不觉得复杂了。
这个公式是从$(x,y,z)$推到$(u,v,d)$的。反之,我们也可以把它写成已知$(u,v,d)$,推导$(x,y,z)$的方式。请读者自己推导一下。
不,还是我们来推导吧……公式是这样的:
$$ z = d/s $$
$$ x = (u-c_x) \cdot z/f_x $$
$$ y = (v-c_y) \cdot z/ f_y $$
怎么样,是不是很简单呢?事实上根据这个公式就可以构建点云啦。
通常,我们会把$f_x, f_y, c_x, c_y$这四个参数定义为相机的内参矩阵$C$,也就是相机做好之后就不会变的参数。相机的内参可以用很多方法来标定,详细的步骤比较繁琐,我们这里就不提了。给定内参之后呢,每个点的空间位置与像素坐标就可以用简单的矩阵模型来描述了:
$$ s \cdot \left[ \begin{array}{l} u \\ v \\ 1 \end{array} \right] = C \cdot \left( R \cdot \left[ \begin{array}{l} x \\ y \\ z \end{array} \right] +t \right)$$
其中,$R$和$t$是相机的姿态。$R$代表旋转矩阵,$t$代表位移矢量。因为我们现在做的是单幅点云,认为相机没有旋转和平移。所以,把$R$设成单位矩阵$I$,把$t$设成了零。$s$是scaling factor,即深度图里给的数据与实际距离的比例。由于深度图给的都是short (mm单位),$s$通常为1000。
小萝卜:于是就有了上面那个$(u,v,d)$转$(x,y,z)$的公式?
师兄:对!真聪明!如果相机发生了位移和旋转,那么只要对这些点进行位移和旋转操作即可。
从2D到3D (编程部分)
下面,我们来实现一个程序,完成从图像到点云的转换。请在上一节讲到的 代码根目录/src/ 文件夹中新建一个generatePointCloud.cpp文件:
touch src/generatePointCloud.cpp
小萝卜:师兄!一个工程里可以有好几个main函数么?
师兄:对呀,cmake允许你自己定义编译的过程。我们会把这个cpp也编译成一个可执行的二进制,只要在cmakelists.txt里作相应的更改便行了。
接下来,请在刚建的文件里输入下面的代码。为保证行文的连贯性,我们先给出完整的代码,然后在重要的地方加以解释。建议新手逐字自己敲一遍,你会掌握得更牢固。
// C++ 标准库
#include <iostream>
#include <string>
using namespace std; // OpenCV 库
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp> // PCL 库
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h> // 定义点云类型
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloud; // 相机内参
const double camera_factor = ;
const double camera_cx = 325.5;
const double camera_cy = 253.5;
const double camera_fx = 518.0;
const double camera_fy = 519.0; // 主函数
int main( int argc, char** argv )
{
// 读取./data/rgb.png和./data/depth.png,并转化为点云 // 图像矩阵
cv::Mat rgb, depth;
// 使用cv::imread()来读取图像
// API: http://docs.opencv.org/modules/highgui/doc/reading_and_writing_images_and_video.html?highlight=imread#cv2.imread
rgb = cv::imread( "./data/rgb.png" );
// rgb 图像是8UC3的彩色图像
// depth 是16UC1的单通道图像,注意flags设置-1,表示读取原始数据不做任何修改
depth = cv::imread( "./data/depth.png", - ); // 点云变量
// 使用智能指针,创建一个空点云。这种指针用完会自动释放。
PointCloud::Ptr cloud ( new PointCloud );
// 遍历深度图
for (int m = ; m < depth.rows; m++)
for (int n=; n < depth.cols; n++)
{
// 获取深度图中(m,n)处的值
ushort d = depth.ptr<ushort>(m)[n];
// d 可能没有值,若如此,跳过此点
if (d == )
continue;
// d 存在值,则向点云增加一个点
PointT p; // 计算这个点的空间坐标
p.z = double(d) / camera_factor;
p.x = (n - camera_cx) * p.z / camera_fx;
p.y = (m - camera_cy) * p.z / camera_fy; // 从rgb图像中获取它的颜色
// rgb是三通道的BGR格式图,所以按下面的顺序获取颜色
p.b = rgb.ptr<uchar>(m)[n*];
p.g = rgb.ptr<uchar>(m)[n*+];
p.r = rgb.ptr<uchar>(m)[n*+]; // 把p加入到点云中
cloud->points.push_back( p );
}
// 设置并保存点云
cloud->height = ;
cloud->width = cloud->points.size();
cout<<"point cloud size = "<<cloud->points.size()<<endl;
cloud->is_dense = false;
pcl::io::savePCDFile( "./pointcloud.pcd", *cloud );
// 清除数据并退出
cloud->points.clear();
cout<<"Point cloud saved."<<endl;
return ;
}
程序运行需要数据。请把上面的那两个图存放在 代码根目录/data 下(没有这个文件夹就新建一个)。
我们使用OpenCV的imread函数读取图片。在OpenCV2里,图像是以矩阵(cv::MAt)作为基本的数据结构。Mat结构既可以帮你管理内存、像素信息,还支持一些常见的矩阵运算,是非常方便的结构。彩色图像含有R,G,B三个通道,每个通道占8个bit(也就是unsigned char),故称为8UC3(8位unsigend char, 3通道)结构。而深度图则是单通道的图像,每个像素由16个bit组成(也就是C++里的unsigned short),像素的值代表该点离传感器的距离。通常1000的值代表1米,所以我们把camera_factor设置成1000. 这样,深度图里每个像素点的读数除以1000,就是它离你的真实距离了。
接下来,我们按照“先列后行”的顺序,遍历了整张深度图。在这个双重循环中:
for (int m = ; m < depth.rows; m++)
for (int n=; n < depth.cols; n++)
m指图像的行,n是图像的列。它和空间点的坐标系关系是这样的:
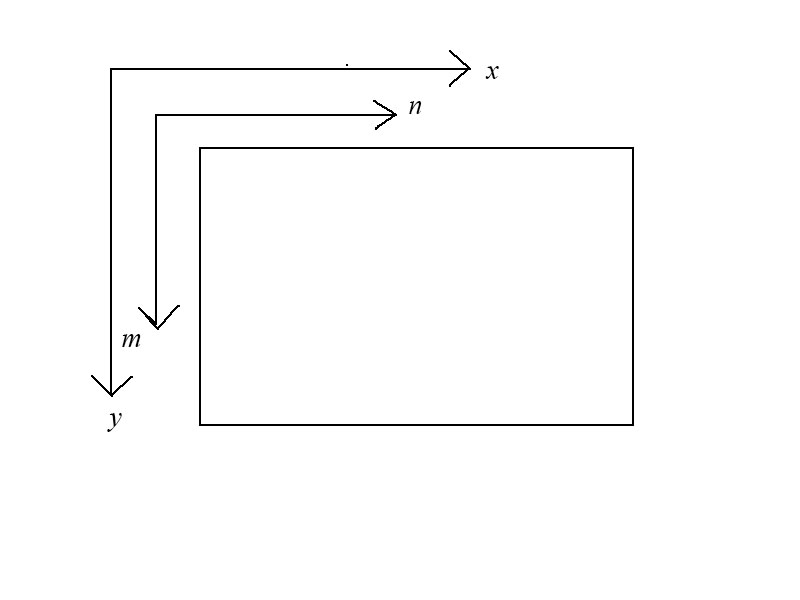
深度图第m行,第n行的数据可以使用depth.ptr<ushort>(m) [n]来获取。其中,cv::Mat的ptr函数会返回指向该图像第m行数据的头指针。然后加上位移n后,这个指针指向的数据就是我们需要读取的数据啦。
计算三维点坐标的公式我们已经给出过了,代码里原封不动地实现了一遍。我们根据这个公式,新增了一个空间点,并放入了点云中。最后,把整个点云存储为 ./data/pointcloud.pcd 文件。
编译并运行
最后,我们在src/CMakeLists.txt里加入几行代码,告诉编译器我们希望编译这个程序。请在此文件中加入以下几行:
# 增加PCL库的依赖
FIND_PACKAGE( PCL REQUIRED COMPONENTS common io ) # 增加opencv的依赖
FIND_PACKAGE( OpenCV REQUIRED ) # 添加头文件和库文件
ADD_DEFINITIONS( ${PCL_DEFINITIONS} )
INCLUDE_DIRECTORIES( ${PCL_INCLUDE_DIRS} )
LINK_LIBRARIES( ${PCL_LIBRARY_DIRS} ) ADD_EXECUTABLE( generate_pointcloud generatePointCloud.cpp )
TARGET_LINK_LIBRARIES( generate_pointcloud ${OpenCV_LIBS}
${PCL_LIBRARIES} )
然后,编译新的工程:
cd build
cmake ..
make
cd ..
如果编译通过,就可在bin目录下找到新写的二进制:generate_pointcloud 运行它:
bin/generate_pointcloud
即可在data目录下生成点云文件。现在,你肯定希望查看一下新生成的点云了。如果已经安装了pcl,就可以通过:
pcl_viewer pointcloud.pcd
来查看新生成的点云。
课后作业
本讲中,我们实现了一个从2D图像到3D点云的转换程序。下一讲,我们将探讨图像的特征点提取与配准。配准过程中,我们需要计算2D图像特征点的空间位置。因此,请你编写一个头文件与一个源文件,实现一个point2dTo3d函数。请在头文件里写这个函数的声明,源文件里给出它的实现,并在cmake中把它编译成一个叫做slam_base的库。(你需要考虑如何定义一个比较好的接口。)这样一来,今后当我们需要计算它时,就只需调用这个函数就可以了。
小萝卜:师兄!这个作业看起来有些难度啊!
师兄:是呀,不能把读者想的太简单嘛。
最后呢,本节用到的源代码仍然可以从我的git里下载到。读者的鼓励就是对我最好的支持!
TIPS:
- 如果你打开点云,只看到红绿蓝三个方块,请按R重置视角。刚才你是站在原点盯着坐标轴看呢。
- 如果点云没有颜色,请按5显示颜色。
- cmake过程可能有PCL的警告,如果你编译成功了,无视它即可。这是程序员的本能。
一起做RGB-D SLAM (2)的更多相关文章
- 一起做RGB-D SLAM (4)
第四讲 点云拼接 广告:“一起做”系列的代码网址:https://github.com/gaoxiang12/rgbd-slam-tutorial-gx 当博客更新时代码也会随着更新. SLAM技术交 ...
- (2)RGB-D SLAM系列- 工具篇(依赖库及编译)
做了个SLAM的小视频,有兴趣的朋友可以看下 https://youtu.be/z5wDzMZF10Q 1)Library depended 一个完整的SLAM系统包括,数据流获取,数据读取,特征提取 ...
- Android 音视频编解码——RGB与YUV格式转换
一.RGB模型与YUV模型 1.RGB模型 我们知道物理三基色分别是红(Red).绿(Green).蓝(Blue).现代的显示器技术就是通过组合不同强度的红绿蓝三原色,来达成几乎任何一种可见光的颜色. ...
- 音视频编解码——RGB与YUV格式转换
一.RGB模型与YUV模型 1.RGB模型 我们知道物理三基色分别是红(Red).绿(Green).蓝(Blue).现代的显示器技术就是通过组合不同强度的红绿蓝三原色,来达成几乎任何一种可见光的颜色. ...
- 常用的SLAM解决方案
ORB SLAM 可以去Github上自己搜索现成的SLAM程序包 在此基础上做优化 视觉SLAM的分类方法:按摄像头的多少分为单目和双目,按是否使用概率方法分为概率法和图法 链接 学习SLAM重要的 ...
- 转:SLAM算法解析:抓住视觉SLAM难点,了解技术发展大趋势
SLAM(Simultaneous Localization and Mapping)是业界公认视觉领域空间定位技术的前沿方向,中文译名为“同步定位与地图构建”,它主要用于解决机器人在未知环境运动时的 ...
- BAD SLAM:捆绑束调整直接RGB-D SLAM
BAD SLAM:捆绑束调整直接RGB-D SLAM BAD SLAM: Bundle Adjusted Direct RGB-D SLAM 论文地址: http://openaccess.thecv ...
- Camera 图像处理原理分析
1 前言 做为拍照手机的核心模块之一,camera sensor效果的调整,涉及到众多的参数,如果对基本的光学原理及sensor软/硬件对图像处理的原理能有深入的理解和把握的话,对我们 ...
- Camera图像处理原理及实例分析-重要图像概念
Camera图像处理原理及实例分析 作者:刘旭晖 colorant@163.com 转载请注明出处 BLOG:http://blog.csdn.net/colorant/ 主页:http://rg ...
- Android Camera2采集摄像头原始数据并手动预览
Android Camera2采集摄像头原始数据并手动预览 最近研究了一下android摄像头开发相关的技术,也看了Google提供的Camera2Basic调用示例,以及网上一部分代码,但都是在Te ...
随机推荐
- android R文件不能识别?
android R文件引入不了原因可能是: 1.xml有错误,导致R文件生成失败:(修改xml,并clear,然后再重新Bulid一下即可) 2.如果是图片,可能是命名有问题,查看并修改(不要以数字开 ...
- css案例 - 评分效果的星星✨外衣
纳尼?什么星星外衣?好,直接上图比较能说清楚: 仔细看会发现规律:可以根据百分比/分值动态改变高亮星星的个数. 分步骤图: 这种效果,如果遇到一分一个星,没有半星(或者有也可以,直接加一个半星的类名) ...
- 题目1460:Oil Deposit(递归遍历图)
题目链接:http://ac.jobdu.com/problem.php?pid=1460 详解链接:https://github.com/zpfbuaa/JobduInCPlusPlus 参考代码: ...
- 跟bWAPP学WEB安全(PHP代码)--SQL注入的一些技巧
背景 模拟环境还是 bWAPP,只不过这个bWAPP的SQL注入有点多,一一写意义不大,在这边就利用这个环境来尝试一些SQL注入的技巧.并研究下PHP的防御代码. 普通的bWAPPSQL注入的简单介绍 ...
- windows网卡共享网络时,报Internet连接共享访问被启用时,出现了一个错误。(null)
今天笔者在自己电脑上作试验时,准备将无线网络连接共享给VMnet1时报Internet连接共享访问被启用时,出现了一个错误.(null)错误: 经上网查询到问题原因:没有启用 Windows Fire ...
- Android Meterial Design Support Library
extends:http://inthecheesefactory.com/blog/android-design-support-library-codelab At the moment I be ...
- iOS - Core Animation(核心动画)
Core Animation,中文翻译为核心动画,它是一组非常强大的动画处理API,使用它能做出非常炫丽的动画效果,而且往往是事半功倍.也就是说,使用少量的代码就可以实现非常强大的功能.Core An ...
- sublime--将vue代码进行高亮显示
vue的.vue文件sublime是不认识,但是为了让 .vue 文件看上去更加简洁:所以要用到一款不错的插件: 下载:vue-syntax-highlight https://gitee.com/m ...
- 美团店铺评价语言处理以及文本分类(logistic regression)
美团店铺评价语言处理以及分类(LogisticRegression) 第一篇 数据清洗与分析部分 第二篇 可视化部分, 第三篇 朴素贝叶斯文本分类 本文是该系列的第四篇 主要讨论逻辑回归分类算法的参数 ...
- Qt Package Project 打包发布程序
在Qt项目开发完成后,我们想将项目打包发布成一个可执行文件,需要做如下步骤: 首先,将项目中的release文件中的可执行文件拷到一个新建的文件夹中,例如project.exe,用Qt自带的生成必备的 ...