2019-2020-1 20199303《Linux内核原理与分析》第三周作业
操作系统是如何工作的
除了存储程序计算机和函数调用堆栈机制,还有一个非常基础的概念就是中断,这三个关键性的方法机制可以称作计算机的三个法宝:程序存储计算机、函数调用、中断
堆栈的作用:记录函数调用框架、传递函数参数、保存返回值地址、提供函数内部局部便量的存储空间。
堆栈相关的寄存器 ESP:堆栈指针,指向堆栈栈顶 EBP:基址指针,指向堆栈栈底
堆栈操作:push pop
实验过程
依次输入
cd ~/LinuxKernel/linux-3.9.4
$ rm -rf mykernel
$ patch -p1 < ../mykernel_for_linux3.9.4sc.patch
$ make allnoconfig
$ make
$ qemu -kernel arch/x86/boot/bzImage
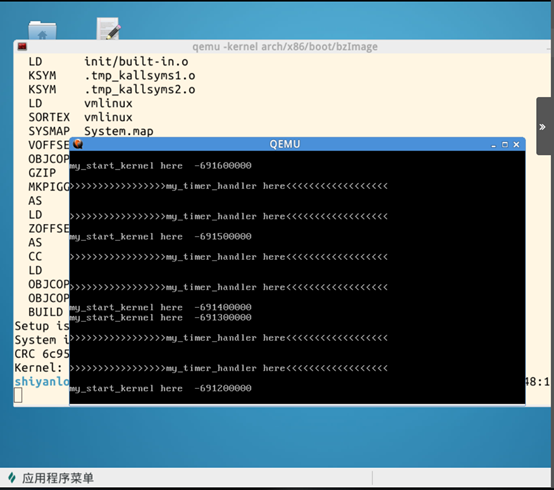
可以看到内核启动效果
mymain.c可以每100000次输出一次my start kernel here ,周期性地产生时钟中断信号,同时执行myinterrupt.c中的代码 。
然后按实验要求修改代码如下所示
mypcb.h:
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*8
/* CPU-specific state of this task */
struct Thread {
unsigned long ip;
unsigned long sp;
};
typedef struct PCB{
int pid;
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
char stack[KERNEL_STACK_SIZE];
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry;
struct PCB *next;
}tPCB;
void my_schedule(void);
mymain.c:
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM];
tPCB * my_current_task = NULL;
volatile int my_need_sched = 0;
void my_process(void);
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* set task[pid].thread.sp to esp */
"pushl %1\n\t" /* push ebp */
"pushl %0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to eip */
"popl %%ebp\n\t"
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
void my_process(void)
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1)
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}
myinterrupt.c:
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM];
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
/*
* Called by timer interrupt.
* it runs in the name of current running process,
* so it use kernel stack of current running process
*/
void my_timer_handler(void)
{
#if 1
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to next process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
"1:\t" /* next process start here */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl %2,%%ebp\n\t" /* restore ebp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
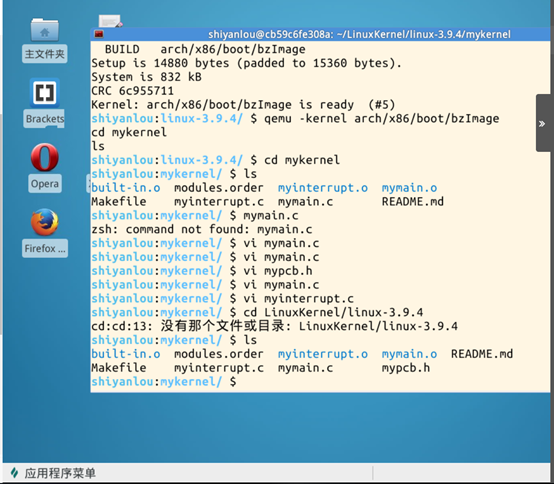
完成后的目录为
运行的结果为
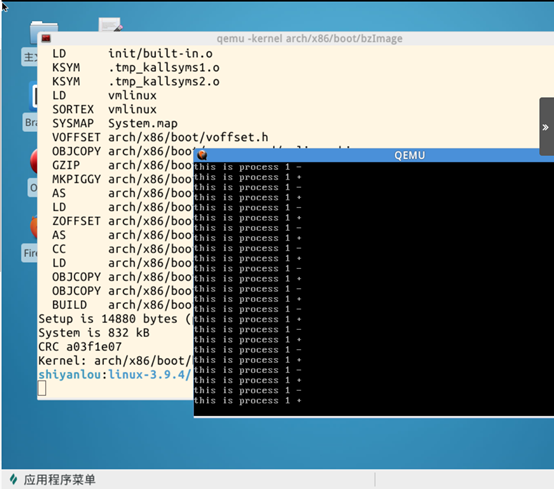

在my_process(void)函数中,每10000000次打印“this is process %d”,如果my_need_sched为1时,执行myinerrupt中的my_schedule()触发中断。
2019-2020-1 20199303《Linux内核原理与分析》第三周作业的更多相关文章
- 2019-2020-1 20199329《Linux内核原理与分析》第九周作业
<Linux内核原理与分析>第九周作业 一.本周内容概述: 阐释linux操作系统的整体构架 理解linux系统的一般执行过程和进程调度的时机 理解linux系统的中断和进程上下文切换 二 ...
- 2019-2020-1 20199329《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 一.上周问题总结: 未能及时整理笔记 Linux还需要多用 markdown格式不熟练 发布博客时间超过规定期限 二.本周学习内容: <庖丁解 ...
- 20169212《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 这一周学习了MOOCLinux内核分析的第一讲,计算机是如何工作的?由于本科对相关知识的不熟悉,所以感觉有的知识理解起来了有一定的难度,不过多查查资 ...
- 20169210《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 本周作业分为两部分:第一部分为观看学习视频并完成实验楼实验一:第二部分为看<Linux内核设计与实现>1.2.18章并安装配置内核. 第 ...
- 2018-2019-1 20189221 《Linux内核原理与分析》第九周作业
2018-2019-1 20189221 <Linux内核原理与分析>第九周作业 实验八 理理解进程调度时机跟踪分析进程调度与进程切换的过程 进程调度 进度调度时机: 1.中断处理过程(包 ...
- 2017-2018-1 20179215《Linux内核原理与分析》第二周作业
20179215<Linux内核原理与分析>第二周作业 这一周主要了解了计算机是如何工作的,包括现在存储程序计算机的工作模型.X86汇编指令包括几种内存地址的寻址方式和push.pop.c ...
- 2019-2020-1 20209313《Linux内核原理与分析》第二周作业
2019-2020-1 20209313<Linux内核原理与分析>第二周作业 零.总结 阐明自己对"计算机是如何工作的"理解. 一.myod 步骤 复习c文件处理内容 ...
- 2018-2019-1 20189221《Linux内核原理与分析》第一周作业
Linux内核原理与分析 - 第一周作业 实验1 Linux系统简介 Linux历史 1991 年 10 月,Linus Torvalds想在自己的电脑上运行UNIX,可是 UNIX 的商业版本非常昂 ...
- 《Linux内核原理与分析》第一周作业 20189210
实验一 Linux系统简介 这一节主要学习了Linux的历史,Linux有关的重要人物以及学习Linux的方法,Linux和Windows的区别.其中学到了LInux中的应用程序大都为开源自由的软件, ...
- 2018-2019-1 20189221《Linux内核原理与分析》第二周作业
读书报告 <庖丁解牛Linux内核分析> 第 1 章 计算工作原理 1.1 存储程序计算机工作模型 1.2 x86-32汇编基础 1.3汇编一个简单的C语言程序并分析其汇编指令执行过程 因 ...
随机推荐
- java四种引用及在LeakCanery中应用
java 四种引用 Java4种引用的级别由高到低依次为: StrongReference > SoftReference > WeakReference > PhantomRefe ...
- 配置springboot项目使用外部tomcat
配置springboot项目使用外部tomcat 1.在pom文件中添加依赖 <!--使用自带的tomcat--> <dependency> <groupId>or ...
- Linux shell 内部命令与外部命令有什么区别以及怎么辨别
内部命令实际上是shell程序的一部分,其中包含的是一些比较简单的linux系统命令,这些命令由shell程序识别并在shell程序内部完成运行,通常在linux系统加载运行时shell就被加载并驻留 ...
- 消息中间件——RabbitMQ(九)RabbitMQ整合Spring AMQP实战!(全)
前言 1. AMQP 核心组件 RabbitAdmin SpringAMQP声明 RabbitTemplate SimpleMessageListenerContainer MessageListen ...
- [python]print简单用法和读取用户输入
代码开发环境:Eclipse 1.打印字符串: print "Hello world!" myString = "Hello world!" print myS ...
- 牛客暑假多校第二场 K carpet
题意:给你一个n*m的矩阵 ,每个位置都有一个字符并且都有一个值,现在需要找到一个p*q的子矩阵, 原来的矩阵可以由现在这个矩阵无限复制然后截取其中的一部分得到,并且要求 子矩阵里最大的值 * (p+ ...
- 杭电多校第九场 hdu6424 Rikka with Time Complexity 数学
Rikka with Time Complexity Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 524288/524288 K ( ...
- poj 3660Cow Contest
题目链接:http://poj.org/problem?id=3660 有n头奶牛还有m种关系a,b表示a牛逼b彩笔,所以a排名比b高 最后问你给出的关系最多能确定多少头奶牛的排名,而且给出的数据不会 ...
- CF996B World Cup 思维 第十四 *
World Cup time limit per test 1 second memory limit per test 256 megabytes input standard input outp ...
- tomcat,nginx日志定时清理
1. Crontab定时任务 Crontab 基本语法 t1 t2 t3 t4 t5 program 其中 t1 是表示分钟,t2 表示小时,t3 表示一个月份中的第几日,t4 表示月份,t5 表示一 ...