Opencv笔记(十六)——认识轮廓
什么是轮廓?
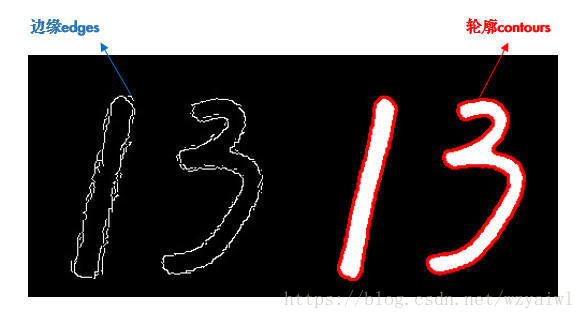
轮廓可以简单认为成连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度。轮廓在形状分析和物体的检测和识别中很有用。谈起轮廓不免想到边缘,它们确实很像。简单的说,轮廓是连续的,边缘并不全都连续(下图)。其实边缘主要是作为图像的特征使用,比如可以用边缘特征可以区分脸和手,而轮廓主要用来分析物体的形态,比如物体的周长和面积等,可以说边缘包括轮廓。
- 为了准确,要使用二值化图像。需要进行阀值化处理或者Canny边界检测。
- 查找轮廓的函数会修改原始图像。如果之后想继续使用原始图像,应该将原始图像储存到其他变量中。
- 在OpenCV中,查找轮廓就像在黑色背景中超白色物体。你应该记住,要找的物体应该是白色而背景应该是黑色。
寻找轮廓并绘制
使用函数cv2.findContours()寻找轮廓,其有三个参数,第一个是输入图像,第二个是轮廓检索模式(一般为cv2.RETR_TREE,真值是3。),第三个是轮廓近似方法(一般为cv2.CHAIN_APPROX_SIMPLE,真值是2)。返回值有两个,第一个是轮廓,第二个是轮廓的层析结构。轮廓(第一个返回值)是一个 Python列表,其中存储这图像中的所有轮廓。每一个轮廓都是一个 Numpy 数组,包含对象边界点(x,y)的坐标。
第二个参数表示轮廓的检索模式,有四种:
- cv2.RETR_EXTERNAL表示只检测外轮廓
- cv2.RETR_LIST检测的轮廓不建立等级关系
- cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
- cv2.RETR_TREE建立一个等级树结构的轮廓。
注:opencv3会返回三个值,分别是img, countours, hierarchy。
注:cv2.findContours()函数接受的输入图像为二值图,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图。

使用cv2.drawContours()函数绘制轮廓,它的第一个参数是原始图像,第二个参数是轮廓,一个 Python 列表。第三个参数是轮廓的索引(在绘制独立轮廓是很有用,当设置为 -1 时绘制所有轮廓)。接下来的参数是轮廓的颜色和厚度等。
注:很多人画图时明明用了彩色,但没有效果,请检查你是在哪个图上画,画在灰度图和二值图上显然是没有彩色的。
# coding=utf-8
import cv2
img = cv2.imread("/home/wl/10.jpeg")
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #转灰度图
ret, thresh = cv2.threshold(img_gray, 175, 255, 0) #转二值图
contours, hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(img,contours,-1,(0,255,0),3)
print len(contours)
while(1):
cv2.imshow("img_gray",img_gray)
cv2.imshow("thresh",img)
# cv2.imshow("thresh",thresh)
cv2.imwrite("/home/wl/baocun.jpg",img_gray )
cv2.imwrite("/home/wl/baocun1.jpg", img)
# cv2.imwrite("/home/wl/baocun2.jpg", thresh)
k = cv2.waitKey(1) & 0XFF
if k==ord('q'):
break;
cv2.destroyAllWindows()原图:
效果图:

轮廓的近似方法
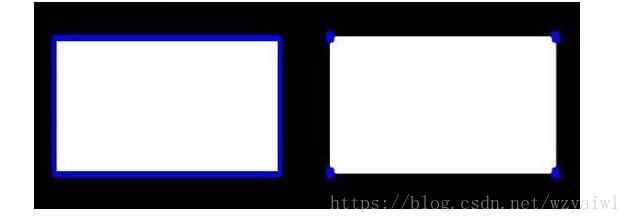
之前提到轮廓是一个形状具有相同灰度值的边界,它会存储形状边界上所有的(x,y)坐标。实际上我们不需要所有的点,当需要直线时,找到两个端点即可。cv2.CHAIN_APPROX_SIMPLE可以实现。它会将轮廓上的冗余点去掉,压缩轮廓,从而节省内存开支。
下面用矩阵来演示,在轮廓列表中的每一个坐标上画一个蓝色圆圈。第一个显示使用cv2.CHAIN_APPROX_NONE的效果,一共734个点,第二个图是使用cv2.CHAIN_APPROX_SIMPLE的结果,只有4个点。
轮廓特征
1.矩
图像的矩可以帮助我们计算图像的质心,面积等。函数cv2.moments()会将计算得到的矩以一个字典的形式返回。
# coding=utf-8
import cv2
img = cv2.imread("/home/wl/10.jpeg")
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #转灰度图
ret, thresh = cv2.threshold(img_gray, 175, 255, 0) #转二值图
contours, hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cnt = contours[0]
M = cv2.moments(cnt)
print M
#{'mu02': 247555019.25, 'mu03': 0.0, 'm11': 9239924636.25, 'nu02': 0.07987551867219916, 'm12': 2599300840867.5, 'mu21': 0.0, 'mu20': 269452279.25, 'nu20': 0.08694083694083694, 'm30': 14262548547266.25,......}计算出对象的重心:cx = int(M['m10']/M['m00']) cy = int(M['m01']/M['m00'])
2.轮廓面积
函数 cv2.contourArea() 计算得到轮廓的面积,也可以用矩(0阶矩),M['m00']。
area=cv2.contourArea(cnt)3.轮廓周长
函数 cv2.arcLength() 计算得到轮廓的周长,第二参数可以用来指定对象的形状是闭合的(True),还是打开的(一条曲线)。
perimeter = cv2.arcLength(cnt,True)4.轮廓近似
将轮廓形状近似到另外一种由更少点组成的轮廓形状,新轮廓的点的数目由我们设定的准确度来决定,使用的Douglas-Peucker算法,可以自己Google。假设我们要在一幅图像中查找一个矩形,但是由于图像的种种原因我们不能得到一个完美的矩形,而是一个“坏形状”,现在就可以使用这个函数来近似这个形状,第二个参数是epsilon,它是从原始轮廓到近似轮廓的最大距离,它是一个准确度参数。选择一个好的 epsilon 对于得到满意结果非常重要。
epsilon=0.1*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)5.凸包
凸包与轮廓近似相似,但不同,虽然有些情况下它们给出的结果是一样的。函数cv2.convexHull()可以用来检测一个曲线是否具有凸性缺陷,并能纠正缺陷。一般来说,凸性曲线总是凸出来的,至少是平的。如果有地方凹进去了就被叫做凸性缺陷。例如下图中的手,红色曲线显示了手的凸包,凸性缺陷被双箭头标出来了。

hull = cv2.convexHull(points,hull,clockwise,returnPoints)参数说明:
- points我们要传入的轮廓
- hull输出,通常不需要
- clockwise方向标志,如果设置为True,输出的凸包是顺时针方向的,否则为逆时针方向。
- returnPoints默认值为True。它会返回凸包上点的坐标,如果设置为False,就会返回与凸包点对应的轮廓上的点。
6.凸性检测
函数cv2.isContourConvex()可以检测一个曲线是不是凸的。它只能返回True或者False。
k=cv2.isContourConvex(cnt)7.边界矩形
直边界矩形,一个直矩形,没有旋转。不会考虑对象是否旋转。所以边界矩形的面积不是最小的。可以使用函数cv2.boundingRect()查找得到,返回四个结果下x、y、w、h。
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
#(x,y)为矩形左上角的坐标,(w,h)是矩形的宽和高旋转的边界矩形,这个边界矩形是面积最小的,因为它考虑了对象的旋转。用函数cv2.minAreaRect()。返回的是一个Box2D结构,其中包含矩形最上角角点坐标(x,y)矩形的宽和高(w,h)以及旋转角度。但是要绘制这个矩形需要矩形的4个角点,可以通过函数cv2.boxPoints()获得。

其中绿色的为直矩形,红色为旋转矩形。
8.最小外接圆
函数cv2.minEnclosingCircle()可以帮我们找到一个对象的外接圆。它是所有能够包括对象的圆中面积最小的一个。f返回外接圆的圆心坐标和半径。
(x,y),radius = cv2.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
img = cv2.circle(img,center,radius,(0,255,0),2)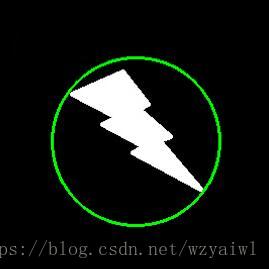
9.椭圆拟合
使用函数cv2.ellipse(),返回值其实就是旋转边界矩形的内切圆。
ellipse = cv2.fitEllipse(cnt)
im = cv2.ellipse(im,ellipse,(0,255,0),2)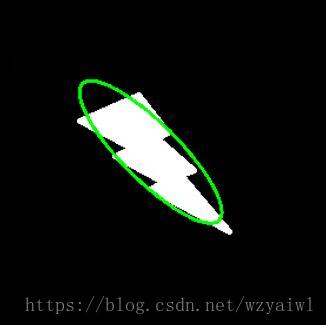
10.直线拟合
可以根据一组点拟合出一条直线,同样我们也可以为图像中的白色点拟合出一条直线。
rows,cols = img.shape[:2]
[vx,vy,x,y]=cv2.fitLine(cnt,cv2.DIST_L2,0,0.01,0.01)
lefty=int((x*vy/vx)+y)
righty=int(((cols-x)*vy/vx)+y)
img = cv2.line(img,(cols-1,righty),(0,lefty),(0,255,0),2)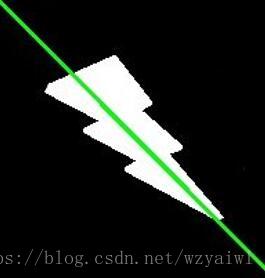
Opencv笔记(十六)——认识轮廓的更多相关文章
- python3.4学习笔记(十六) windows下面安装easy_install和pip教程
python3.4学习笔记(十六) windows下面安装easy_install和pip教程 easy_install和pip都是用来下载安装Python一个公共资源库PyPI的相关资源包的 首先安 ...
- Opencv笔记(十八)——轮廓的更多函数及其层次结构
凸缺陷 前面我们已经学习了轮廓的凸包,对象上的任何凹陷都被成为凸缺陷.OpenCV 中有一个函数 cv.convexityDefect() 可以帮助我们找到凸缺陷.函数调用如下: hull = cv2 ...
- (C/C++学习笔记) 十六. 预处理
十六. 预处理 ● 关键字typeof 作用: 为一个已有的数据类型起一个或多个别名(alias), 从而增加了代码的可读性. typedef known_type_name new_type_nam ...
- Python+OpenCV图像处理(十六)—— 轮廓发现
简介:轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓发现结果. 代码如下: import cv2 as cv import numpy as np def c ...
- OpenCV学习笔记十六:opencv_calib3d模块
一,简介: 该库用于3D信息重建,姿态估计,摄像机标定等.
- SpringBoot笔记十六:ElasticSearch
目录 ElasticSearch官方文档 ElasticSearch安装 ElasticSearch简介 ElasticSearch操作数据,RESTful风格 存储 检查是否存在 删除 查询 更新 ...
- Opencv笔记(十七)——轮廓性质
边界矩形的宽高比 x,y,w,h = cv2.boundingRect(cnt) aspect_ratio = float(w)/h Extent Extent就是轮廓面积与边界矩形面积的比. are ...
- Opencv笔记(六)——把滑动条当调色板
学习目标: 学会把滑动条绑定到 OpenCV 的窗口. 学习函数:cv2.getTrackbarPos(), cv2.creatTrackbar()等. 简单演示: 通过调节滑动条来设定画板颜色.我们 ...
- JavaScript权威设计--CSS(简要学习笔记十六)
1.Document的一些特殊属性 document.lastModified document.URL document.title document.referrer document.domai ...
- MySQL学习笔记十六:锁机制
1.数据库锁就是为了保证数据库数据的一致性在一个共享资源被并发访问时使得数据访问顺序化的机制.MySQL数据库的锁机制比较独特,支持不同的存储引擎使用不同的锁机制. 2.MySQL使用了三种类型的锁机 ...
随机推荐
- java基础——深拷贝和浅拷贝的区别
浅拷贝:对基本数据类型进行值传递,对引用数据类型进行引用传递般的拷贝,此为浅拷贝. 深拷贝:对基本数据类型进行值传递,对引用数据类型船舰一个新的对象,并复制内容,这是深拷贝.
- part12 非核心代码异步加载
router文件中的 index component: ()=> import(‘path’) // 这样 访问一个页面 就只请求这个页面的js逻辑 //当app很小的的时候不需要做异步拆分 / ...
- 读取cookie、写进cookie方法
整理 读取cookie.写进cookie方法. //设置cookies中的值 function setCookie(name, value) { var Days = 30; var exp = ne ...
- Codeforces Round #599 (Div. 2) Tile Painting
题意:就是给你一个n,然后如果 n mod | i - j | == 0 并且 | i - j |>1 的话,那么i 和 j 就是同一种颜色,问你最大有多少种颜色? 思路: 比赛的时候,看到 ...
- nodejs(15)express开启cors跨域
express开启cors跨域 package.json "dependencies": { "body-parser": "^1.18.3" ...
- ES6 之 Integer数据类型
1.简介(仅仅是提案) js所有数字都保存成64为浮点数,这就决定了整数的精确程度只能到53个二进制位. 大于这个范围的整数,js是无法精确表示的,这使得js不合适进行科学和金融方面的精确计算. 故引 ...
- Codeforces Round #620 (Div. 2)D dilworld定理
题:https://codeforces.com/contest/1304/problem/D 题意:给定长度为n-1的只含’>'和‘<’的字符串,让你构造出俩个排列,俩个排列相邻的数字之 ...
- postman批量接口测试注意事项
1.使用cvs文件 导入文件后最后行出现\r符号 用文本打开 删除最后一行空白行 2.打印cvs文件中的接口调用的参数 Pre-request Script: var beginDate=data.b ...
- idea启动服务连接mysql后 Navicat连接mysql就报错2013-Lost connection toMySQL server at
我是使用navicat的windows端 连接centos下mysql服务器 第一次常规连接mysql正常,idea启动服务连接mysql后 Navicat连接mysql就报错2013-Lost co ...
- 33. docker swarm 集群服务通信 之 RoutingMesh - Ingress 网络
1.作用 当在 任何 一个 swarm 节点去访问 端口服务的时候 会通过 本节点 的 IPVS ( ip virtual service ) 到 真正的 swarm 节点上 当访问 docker h ...