双目相机标定以及立体测距原理及OpenCV实现
单目相机标定的目标是获取相机的内参和外参,内参(1/dx,1/dy,Cx,Cy,f)表征了相机的内部结构参数,外参是相机的旋转矩阵R和平移向量t。内参中dx和dy是相机单个感光单元芯片的长度和宽度,是一个物理尺寸,有时候会有dx=dy,这时候感光单元是一个正方形。Cx和Cy分别代表相机感光芯片的中心点在x和y方向上可能存在的偏移,因为芯片在安装到相机模组上的时候,由于制造精度和组装工艺的影响,很难做到中心完全重合。f代表相机的焦距。
双目标定的第一步需要分别获取左右相机的内外参数,之后通过立体标定对左右两幅图像进行立体校准和对其,最后就是确定两个相机的相对位置关系,即中心距。
首先看一下双目测距的基本原理:
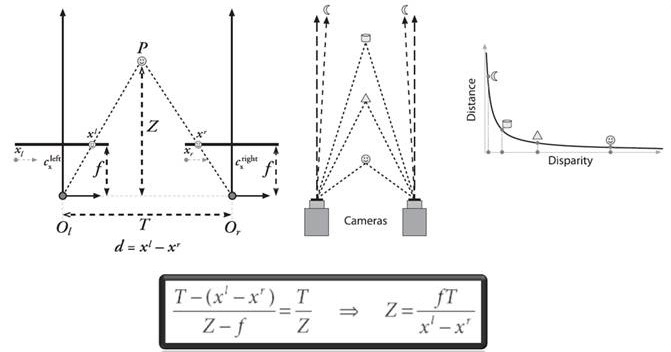
假设有一个点p,沿着垂直于相机中心连线方向上下移动,则其在左右相机上的成像点的位置会不断变化,即d=x1-x2的大小不断变化,并且点p和相机之间的距离Z跟视差d存在着反比关系。上式中视差d可以通过两个相机中心距T减去p点分别在左右图像上的投影点偏离中心点的值获得,所以只要获取到了两个相机的中心距T,就可以评估出p点距离相机的距离,这个中心距T也是双目标定中需要确立的参数之一。
当然这一切有一个前提就是要在两个相机成像上定位到同一个点p上,就是要把左右两个图片的点匹配起来,这就涉及到双目校正的动作。如果通过一幅图片上一个点的特征在另一个二维图像空间上匹配对应点,这个过程会非常耗时。为了减少匹配搜索的运算量,我们可以利用极限约束使得对应点的匹配由二维搜索空间降到一维搜索空间。
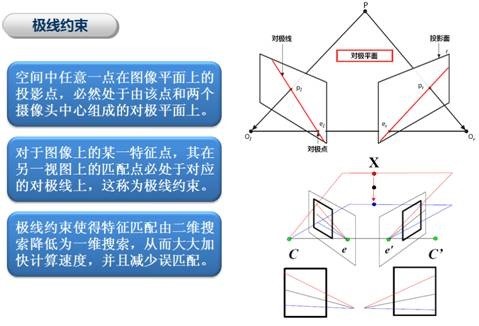
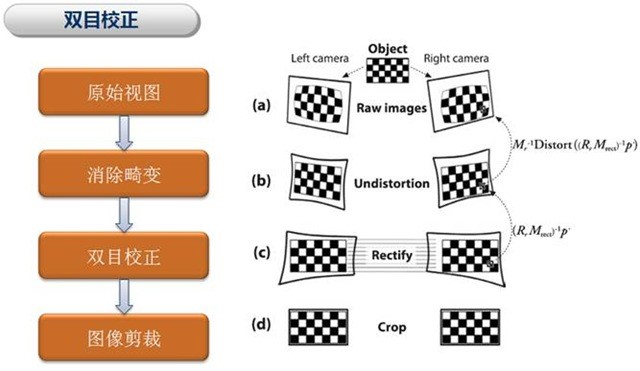
这时候要用双目校正把消除畸变后的两幅图像在水平方向严格的对齐,使得两幅图像的对极线恰好在同一水平线上,这样一幅图像上任意一点与其在另一幅图像上的匹配点就必然具有相同的行号,只需要在该行进行一维搜索就可匹配到对应点。
下边Opencv双目相机校正的代码是在自带的程序stereo_calib.cpp基础上修改的,位置在“XX\opencv\sources\samples\cpp\”,使用时拷贝目录下的26张图片和stereo_calib.xml到当前工程目录下,并在工程调试->命令参数里设置参数为:StereoCalibration
-w 9 -h 6 stereo_calib.xml
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <vector>
#include <string>
#include <algorithm>
#include <iostream>
#include <iterator>
#include <stdio.h>
#include <stdlib.h>
#include <ctype.h>
using namespace cv;
using namespace std;
static void StereoCalib(const vector<string>& imagelist, Size boardSize, bool useCalibrated=true, bool showRectified=true)
{
if( imagelist.size() % 2 != 0 )
{
cout << "Error: the image list contains odd (non-even) number of elements\n";
return;
}
bool displayCorners = true;//true;
const int maxScale = 2;
const float squareSize = 1.f; // Set this to your actual square size
// ARRAY AND VECTOR STORAGE:
vector<vector<Point2f> > imagePoints[2];
vector<vector<Point3f> > objectPoints;
Size imageSize;
int i, j, k, nimages = (int)imagelist.size()/2;
imagePoints[0].resize(nimages);
imagePoints[1].resize(nimages);
vector<string> goodImageList;
for( i = j = 0; i < nimages; i++ )
{
for( k = 0; k < 2; k++ )
{
const string& filename = imagelist[i*2+k];
Mat img = imread(filename, 0);
if(img.empty())
break;
if( imageSize == Size() )
imageSize = img.size();
else if( img.size() != imageSize )
{
cout << "The image " << filename << " has the size different from the first image size. Skipping the pair\n";
break;
}
bool found = false;
vector<Point2f>& corners = imagePoints[k][j];
for( int scale = 1; scale <= maxScale; scale++ )
{
Mat timg;
if( scale == 1 )
timg = img;
else
resize(img, timg, Size(), scale, scale);
found = findChessboardCorners(timg, boardSize, corners,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_NORMALIZE_IMAGE);
if( found )
{
if( scale > 1 )
{
Mat cornersMat(corners);
cornersMat *= 1./scale;
}
break;
}
}
if( displayCorners )
{
cout << filename << endl;
Mat cimg, cimg1;
cvtColor(img, cimg, COLOR_GRAY2BGR);
drawChessboardCorners(cimg, boardSize, corners, found);
double sf = 640./MAX(img.rows, img.cols);
resize(cimg, cimg1, Size(), sf, sf);
imshow("corners", cimg1);
char c = (char)waitKey(500);
if( c == 27 || c == 'q' || c == 'Q' ) //Allow ESC to quit
exit(-1);
}
else
putchar('.');
if( !found )
break;
cornerSubPix(img, corners, Size(11,11), Size(-1,-1),
TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS,
30, 0.01));
}
if( k == 2 )
{
goodImageList.push_back(imagelist[i*2]);
goodImageList.push_back(imagelist[i*2+1]);
j++;
}
}
cout << j << " pairs have been successfully detected.\n";
nimages = j;
if( nimages < 2 )
{
cout << "Error: too little pairs to run the calibration\n";
return;
}
imagePoints[0].resize(nimages);
imagePoints[1].resize(nimages);
objectPoints.resize(nimages);
for( i = 0; i < nimages; i++ )
{
for( j = 0; j < boardSize.height; j++ )
for( k = 0; k < boardSize.width; k++ )
objectPoints[i].push_back(Point3f(k*squareSize, j*squareSize, 0));
}
cout << "Running stereo calibration ...\n";
Mat cameraMatrix[2], distCoeffs[2];
cameraMatrix[0] = Mat::eye(3, 3, CV_64F);
cameraMatrix[1] = Mat::eye(3, 3, CV_64F);
Mat R, T, E, F;
double rms = stereoCalibrate(objectPoints, imagePoints[0], imagePoints[1],
cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, E, F,
TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5),
CV_CALIB_FIX_ASPECT_RATIO +
CV_CALIB_ZERO_TANGENT_DIST +
CV_CALIB_SAME_FOCAL_LENGTH +
CV_CALIB_RATIONAL_MODEL +
CV_CALIB_FIX_K3 + CV_CALIB_FIX_K4 + CV_CALIB_FIX_K5);
cout << "done with RMS error=" << rms << endl;
// CALIBRATION QUALITY CHECK
// because the output fundamental matrix implicitly
// includes all the output information,
// we can check the quality of calibration using the
// epipolar geometry constraint: m2^t*F*m1=0
double err = 0;
int npoints = 0;
vector<Vec3f> lines[2];
for( i = 0; i < nimages; i++ )
{
int npt = (int)imagePoints[0][i].size();
Mat imgpt[2];
for( k = 0; k < 2; k++ )
{
imgpt[k] = Mat(imagePoints[k][i]);
undistortPoints(imgpt[k], imgpt[k], cameraMatrix[k], distCoeffs[k], Mat(), cameraMatrix[k]);
computeCorrespondEpilines(imgpt[k], k+1, F, lines[k]);
}
for( j = 0; j < npt; j++ )
{
double errij = fabs(imagePoints[0][i][j].x*lines[1][j][0] +
imagePoints[0][i][j].y*lines[1][j][1] + lines[1][j][2]) +
fabs(imagePoints[1][i][j].x*lines[0][j][0] +
imagePoints[1][i][j].y*lines[0][j][1] + lines[0][j][2]);
err += errij;
}
npoints += npt;
}
cout << "average reprojection err = " << err/npoints << endl;
// save intrinsic parameters
FileStorage fs("intrinsics.yml", CV_STORAGE_WRITE);
if( fs.isOpened() )
{
fs << "M1" << cameraMatrix[0] << "D1" << distCoeffs[0] <<
"M2" << cameraMatrix[1] << "D2" << distCoeffs[1];
fs.release();
}
else
cout << "Error: can not save the intrinsic parameters\n";
Mat R1, R2, P1, P2, Q;
Rect validRoi[2];
stereoRectify(cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, R1, R2, P1, P2, Q,
CALIB_ZERO_DISPARITY, 1, imageSize, &validRoi[0], &validRoi[1]);
fs.open("extrinsics.yml", CV_STORAGE_WRITE);
if( fs.isOpened() )
{
fs << "R" << R << "T" << T << "R1" << R1 << "R2" << R2 << "P1" << P1 << "P2" << P2 << "Q" << Q;
fs.release();
}
else
cout << "Error: can not save the extrinsic parameters\n";
// OpenCV can handle left-right
// or up-down camera arrangements
bool isVerticalStereo = fabs(P2.at<double>(1, 3)) > fabs(P2.at<double>(0, 3));
// COMPUTE AND DISPLAY RECTIFICATION
if( !showRectified )
return;
Mat rmap[2][2];
// IF BY CALIBRATED (BOUGUET'S METHOD)
if( useCalibrated )
{
// we already computed everything
}
// OR ELSE HARTLEY'S METHOD
else
// use intrinsic parameters of each camera, but
// compute the rectification transformation directly
// from the fundamental matrix
{
vector<Point2f> allimgpt[2];
for( k = 0; k < 2; k++ )
{
for( i = 0; i < nimages; i++ )
std::copy(imagePoints[k][i].begin(), imagePoints[k][i].end(), back_inserter(allimgpt[k]));
}
F = findFundamentalMat(Mat(allimgpt[0]), Mat(allimgpt[1]), FM_8POINT, 0, 0);
Mat H1, H2;
stereoRectifyUncalibrated(Mat(allimgpt[0]), Mat(allimgpt[1]), F, imageSize, H1, H2, 3);
R1 = cameraMatrix[0].inv()*H1*cameraMatrix[0];
R2 = cameraMatrix[1].inv()*H2*cameraMatrix[1];
P1 = cameraMatrix[0];
P2 = cameraMatrix[1];
}
//Precompute maps for cv::remap()
initUndistortRectifyMap(cameraMatrix[0], distCoeffs[0], R1, P1, imageSize, CV_16SC2, rmap[0][0], rmap[0][1]);
initUndistortRectifyMap(cameraMatrix[1], distCoeffs[1], R2, P2, imageSize, CV_16SC2, rmap[1][0], rmap[1][1]);
Mat canvas;
double sf;
int w, h;
if( !isVerticalStereo )
{
sf = 600./MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width*sf);
h = cvRound(imageSize.height*sf);
canvas.create(h, w*2, CV_8UC3);
}
else
{
sf = 300./MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width*sf);
h = cvRound(imageSize.height*sf);
canvas.create(h*2, w, CV_8UC3);
}
for( i = 0; i < nimages; i++ )
{
for( k = 0; k < 2; k++ )
{
Mat img = imread(goodImageList[i*2+k], 0), rimg, cimg;
remap(img, rimg, rmap[k][0], rmap[k][1], CV_INTER_LINEAR);
imshow("单目相机校正",rimg);
waitKey();
cvtColor(rimg, cimg, COLOR_GRAY2BGR);
Mat canvasPart = !isVerticalStereo ? canvas(Rect(w*k, 0, w, h)) : canvas(Rect(0, h*k, w, h));
resize(cimg, canvasPart, canvasPart.size(), 0, 0, CV_INTER_AREA);
if( useCalibrated )
{
Rect vroi(cvRound(validRoi[k].x*sf), cvRound(validRoi[k].y*sf),
cvRound(validRoi[k].width*sf), cvRound(validRoi[k].height*sf));
rectangle(canvasPart, vroi, Scalar(0,0,255), 3, 8);
}
}
if( !isVerticalStereo )
for( j = 0; j < canvas.rows; j += 16 )
line(canvas, Point(0, j), Point(canvas.cols, j), Scalar(0, 255, 0), 1, 8);
else
for( j = 0; j < canvas.cols; j += 16 )
line(canvas, Point(j, 0), Point(j, canvas.rows), Scalar(0, 255, 0), 1, 8);
imshow("双目相机校正对齐", canvas);
waitKey();
char c = (char)waitKey();
if( c == 27 || c == 'q' || c == 'Q' )
break;
}
}
static bool readStringList( const string& filename, vector<string>& l )
{
l.resize(0);
FileStorage fs(filename, FileStorage::READ);
if( !fs.isOpened() )
return false;
FileNode n = fs.getFirstTopLevelNode();
if( n.type() != FileNode::SEQ )
return false;
FileNodeIterator it = n.begin(), it_end = n.end();
for( ; it != it_end; ++it )
l.push_back((string)*it);
return true;
}
int main(int argc, char** argv)
{
Size boardSize;
string imagelistfn;
bool showRectified = true;
for( int i = 1; i < argc; i++ )
{
if( string(argv[i]) == "-w" )
{
if( sscanf(argv[++i], "%d", &boardSize.width) != 1 || boardSize.width <= 0 )
{
cout << "invalid board width" << endl;
return -1;
}
}
else if( string(argv[i]) == "-h" )
{
if( sscanf(argv[++i], "%d", &boardSize.height) != 1 || boardSize.height <= 0 )
{
cout << "invalid board height" << endl;
return -1;
}
}
else if( string(argv[i]) == "-nr" )
showRectified = false;
else if( string(argv[i]) == "--help" )
return -1;
else if( argv[i][0] == '-' )
{
cout << "invalid option " << argv[i] << endl;
return 0;
}
else
imagelistfn = argv[i];
}
if( imagelistfn == "" )
{
imagelistfn = "stereo_calib.xml";
boardSize = Size(9, 6);
}
else if( boardSize.width <= 0 || boardSize.height <= 0 )
{
cout << "if you specified XML file with chessboards, you should also specify the board width and height (-w and -h options)" << endl;
return 0;
}
vector<string> imagelist;
bool ok = readStringList(imagelistfn, imagelist);
if(!ok || imagelist.empty())
{
cout << "can not open " << imagelistfn << " or the string list is empty" << endl;
return -1;
}
StereoCalib(imagelist, boardSize, true, showRectified);
return 0;
}
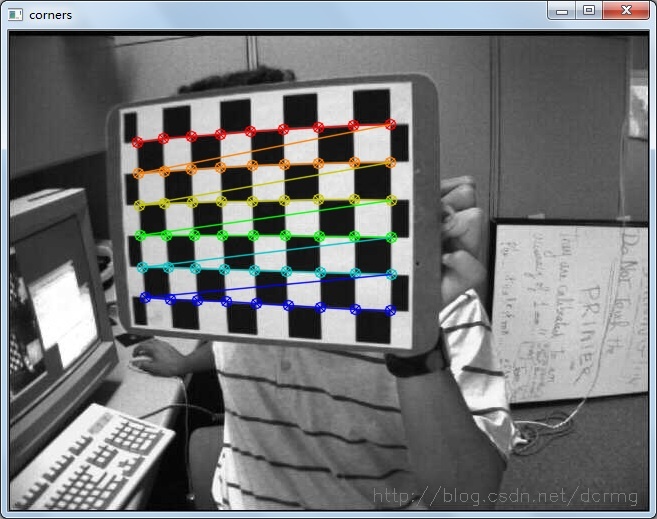
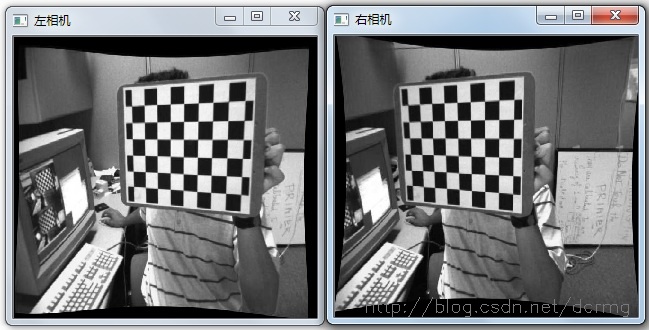
右相机其中一个标定图片查找到的角点:
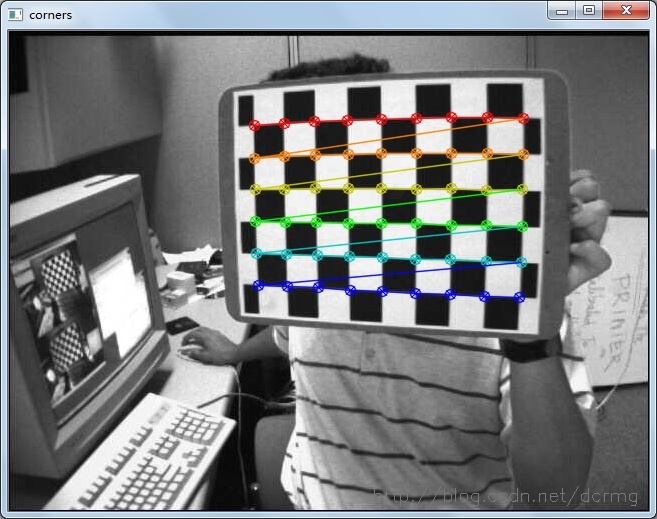
左相机其中一个标定图片查找到的角点:
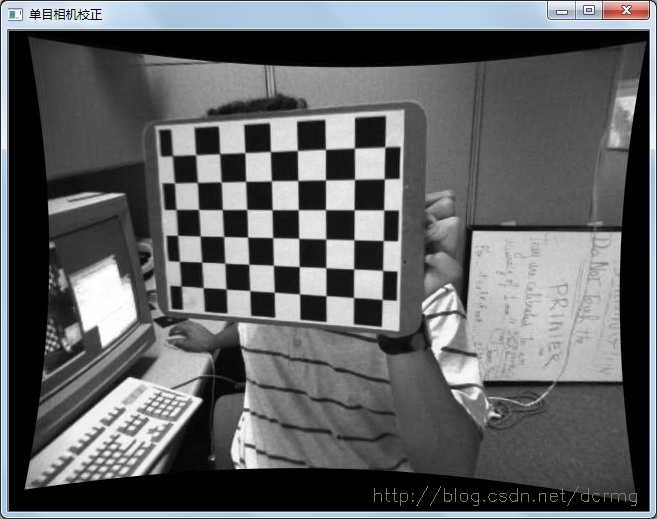
右相机单目校正:
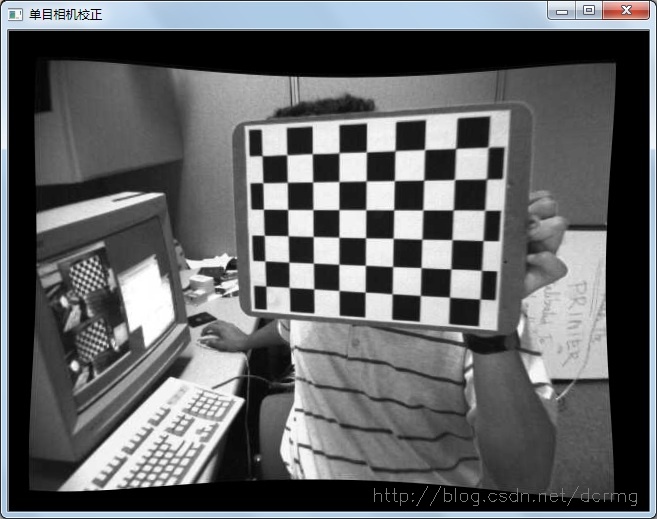
左相机单目校正:
左右相机双目立体校正:
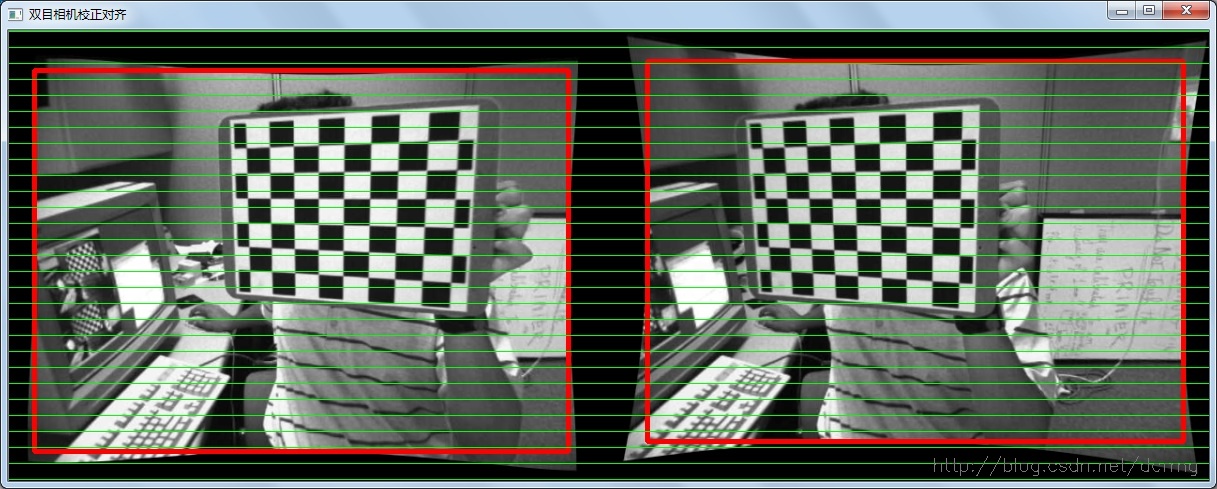
双目相机标定后,可以看到左右相机对应匹配点基本上已经水平对齐。
之后在该程序基础上运行stereo_match.cpp,求左右相机的视差。同样工程调试->命令参数里设置参数为:left01.jpg right01.jpg --algorithm=bm -i intrinsics.yml -e extrinsics.yml:
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/contrib/contrib.hpp"
#include <stdio.h>
using namespace cv;
static void saveXYZ(const char* filename, const Mat& mat)
{
const double max_z = 1.0e4;
FILE* fp = fopen(filename, "wt");
for(int y = 0; y < mat.rows; y++)
{
for(int x = 0; x < mat.cols; x++)
{
Vec3f point = mat.at<Vec3f>(y, x);
if(fabs(point[2] - max_z) < FLT_EPSILON || fabs(point[2]) > max_z) continue;
fprintf(fp, "%f %f %f\n", point[0], point[1], point[2]);
}
}
fclose(fp);
}
int main(int argc, char** argv)
{
const char* algorithm_opt = "--algorithm=";
const char* maxdisp_opt = "--max-disparity=";
const char* blocksize_opt = "--blocksize=";
const char* nodisplay_opt = "--no-display";
const char* scale_opt = "--scale=";
if(argc < 3)
{
return 0;
}
const char* img1_filename = 0;
const char* img2_filename = 0;
const char* intrinsic_filename = 0;
const char* extrinsic_filename = 0;
const char* disparity_filename = 0;
const char* point_cloud_filename = 0;
enum { STEREO_BM=0, STEREO_SGBM=1, STEREO_HH=2, STEREO_VAR=3 };
int alg = STEREO_SGBM;
int SADWindowSize = 0, numberOfDisparities = 0;
bool no_display = false;
float scale = 1.f;
StereoBM bm;
StereoSGBM sgbm;
StereoVar var;
for( int i = 1; i < argc; i++ )
{
if( argv[i][0] != '-' )
{
if( !img1_filename )
img1_filename = argv[i];
else
img2_filename = argv[i];
}
else if( strncmp(argv[i], algorithm_opt, strlen(algorithm_opt)) == 0 )
{
char* _alg = argv[i] + strlen(algorithm_opt);
alg = strcmp(_alg, "bm") == 0 ? STEREO_BM :
strcmp(_alg, "sgbm") == 0 ? STEREO_SGBM :
strcmp(_alg, "hh") == 0 ? STEREO_HH :
strcmp(_alg, "var") == 0 ? STEREO_VAR : -1;
if( alg < 0 )
{
printf("Command-line parameter error: Unknown stereo algorithm\n\n");
return -1;
}
}
else if( strncmp(argv[i], maxdisp_opt, strlen(maxdisp_opt)) == 0 )
{
if( sscanf( argv[i] + strlen(maxdisp_opt), "%d", &numberOfDisparities ) != 1 ||
numberOfDisparities < 1 || numberOfDisparities % 16 != 0 )
{
printf("Command-line parameter error: The max disparity (--maxdisparity=<...>) must be a positive integer divisible by 16\n");
return -1;
}
}
else if( strncmp(argv[i], blocksize_opt, strlen(blocksize_opt)) == 0 )
{
if( sscanf( argv[i] + strlen(blocksize_opt), "%d", &SADWindowSize ) != 1 ||
SADWindowSize < 1 || SADWindowSize % 2 != 1 )
{
printf("Command-line parameter error: The block size (--blocksize=<...>) must be a positive odd number\n");
return -1;
}
}
else if( strncmp(argv[i], scale_opt, strlen(scale_opt)) == 0 )
{
if( sscanf( argv[i] + strlen(scale_opt), "%f", &scale ) != 1 || scale < 0 )
{
printf("Command-line parameter error: The scale factor (--scale=<...>) must be a positive floating-point number\n");
return -1;
}
}
else if( strcmp(argv[i], nodisplay_opt) == 0 )
no_display = true;
else if( strcmp(argv[i], "-i" ) == 0 )
intrinsic_filename = argv[++i];
else if( strcmp(argv[i], "-e" ) == 0 )
extrinsic_filename = argv[++i];
else if( strcmp(argv[i], "-o" ) == 0 )
disparity_filename = argv[++i];
else if( strcmp(argv[i], "-p" ) == 0 )
point_cloud_filename = argv[++i];
else
{
printf("Command-line parameter error: unknown option %s\n", argv[i]);
return -1;
}
}
if( !img1_filename || !img2_filename )
{
printf("Command-line parameter error: both left and right images must be specified\n");
return -1;
}
if( (intrinsic_filename != 0) ^ (extrinsic_filename != 0) )
{
printf("Command-line parameter error: either both intrinsic and extrinsic parameters must be specified, or none of them (when the stereo pair is already rectified)\n");
return -1;
}
if( extrinsic_filename == 0 && point_cloud_filename )
{
printf("Command-line parameter error: extrinsic and intrinsic parameters must be specified to compute the point cloud\n");
return -1;
}
int color_mode = alg == STEREO_BM ? 0 : -1;
Mat img1 = imread(img1_filename, color_mode);
Mat img2 = imread(img2_filename, color_mode);
if (img1.empty())
{
printf("Command-line parameter error: could not load the first input image file\n");
return -1;
}
if (img2.empty())
{
printf("Command-line parameter error: could not load the second input image file\n");
return -1;
}
if (scale != 1.f)
{
Mat temp1, temp2;
int method = scale < 1 ? INTER_AREA : INTER_CUBIC;
resize(img1, temp1, Size(), scale, scale, method);
img1 = temp1;
resize(img2, temp2, Size(), scale, scale, method);
img2 = temp2;
}
Size img_size = img1.size();
Rect roi1, roi2;
Mat Q;
if( intrinsic_filename )
{
// reading intrinsic parameters
FileStorage fs(intrinsic_filename, CV_STORAGE_READ);
if(!fs.isOpened())
{
printf("Failed to open file %s\n", intrinsic_filename);
return -1;
}
Mat M1, D1, M2, D2;
fs["M1"] >> M1;
fs["D1"] >> D1;
fs["M2"] >> M2;
fs["D2"] >> D2;
M1 *= scale;
M2 *= scale;
fs.open(extrinsic_filename, CV_STORAGE_READ);
if(!fs.isOpened())
{
printf("Failed to open file %s\n", extrinsic_filename);
return -1;
}
Mat R, T, R1, P1, R2, P2;
fs["R"] >> R;
fs["T"] >> T;
stereoRectify( M1, D1, M2, D2, img_size, R, T, R1, R2, P1, P2, Q, CALIB_ZERO_DISPARITY, -1, img_size, &roi1, &roi2 );
Mat map11, map12, map21, map22;
initUndistortRectifyMap(M1, D1, R1, P1, img_size, CV_16SC2, map11, map12);
initUndistortRectifyMap(M2, D2, R2, P2, img_size, CV_16SC2, map21, map22);
Mat img1r, img2r;
remap(img1, img1r, map11, map12, INTER_LINEAR);
remap(img2, img2r, map21, map22, INTER_LINEAR);
img1 = img1r;
img2 = img2r;
}
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((img_size.width/8) + 15) & -16;
bm.state->roi1 = roi1;
bm.state->roi2 = roi2;
bm.state->preFilterCap = 31;
bm.state->SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 9;
bm.state->minDisparity = 0;
bm.state->numberOfDisparities = numberOfDisparities;
bm.state->textureThreshold = 10;
bm.state->uniquenessRatio = 15;
bm.state->speckleWindowSize = 100;
bm.state->speckleRange = 32;
bm.state->disp12MaxDiff = 1;
sgbm.preFilterCap = 63;
sgbm.SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 3;
int cn = img1.channels();
sgbm.P1 = 8*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
sgbm.P2 = 32*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
sgbm.minDisparity = 0;
sgbm.numberOfDisparities = numberOfDisparities;
sgbm.uniquenessRatio = 10;
sgbm.speckleWindowSize = bm.state->speckleWindowSize;
sgbm.speckleRange = bm.state->speckleRange;
sgbm.disp12MaxDiff = 1;
sgbm.fullDP = alg == STEREO_HH;
var.levels = 3; // ignored with USE_AUTO_PARAMS
var.pyrScale = 0.5; // ignored with USE_AUTO_PARAMS
var.nIt = 25;
var.minDisp = -numberOfDisparities;
var.maxDisp = 0;
var.poly_n = 3;
var.poly_sigma = 0.0;
var.fi = 15.0f;
var.lambda = 0.03f;
var.penalization = var.PENALIZATION_TICHONOV; // ignored with USE_AUTO_PARAMS
var.cycle = var.CYCLE_V; // ignored with USE_AUTO_PARAMS
var.flags = var.USE_SMART_ID | var.USE_AUTO_PARAMS | var.USE_INITIAL_DISPARITY | var.USE_MEDIAN_FILTERING ;
Mat disp, disp8;
//Mat img1p, img2p, dispp;
//copyMakeBorder(img1, img1p, 0, 0, numberOfDisparities, 0, IPL_BORDER_REPLICATE);
//copyMakeBorder(img2, img2p, 0, 0, numberOfDisparities, 0, IPL_BORDER_REPLICATE);
int64 t = getTickCount();
if( alg == STEREO_BM )
bm(img1, img2, disp);
else if( alg == STEREO_VAR ) {
var(img1, img2, disp);
}
else if( alg == STEREO_SGBM || alg == STEREO_HH )
sgbm(img1, img2, disp);
t = getTickCount() - t;
printf("Time elapsed: %fms\n", t*1000/getTickFrequency());
//disp = dispp.colRange(numberOfDisparities, img1p.cols);
waitKey();
if( alg != STEREO_VAR )
disp.convertTo(disp8, CV_8U, 255/(numberOfDisparities*16.));
else
disp.convertTo(disp8, CV_8U);
if( !no_display )
{
namedWindow("左相机", 0);
imshow("左相机", img1);
namedWindow("右相机", 0);
imshow("右相机", img2);
imshow("左右相机视差图", disp8);
printf("press any key to continue...");
fflush(stdout);
waitKey();
printf("\n");
}
if(disparity_filename)
imwrite(disparity_filename, disp8);
if(point_cloud_filename)
{
printf("storing the point cloud...");
fflush(stdout);
Mat xyz;
reprojectImageTo3D(disp, xyz, Q, true);
saveXYZ(point_cloud_filename, xyz);
printf("\n");
}
return 0;
}
左右相机校正效果:
左右相机视差图:
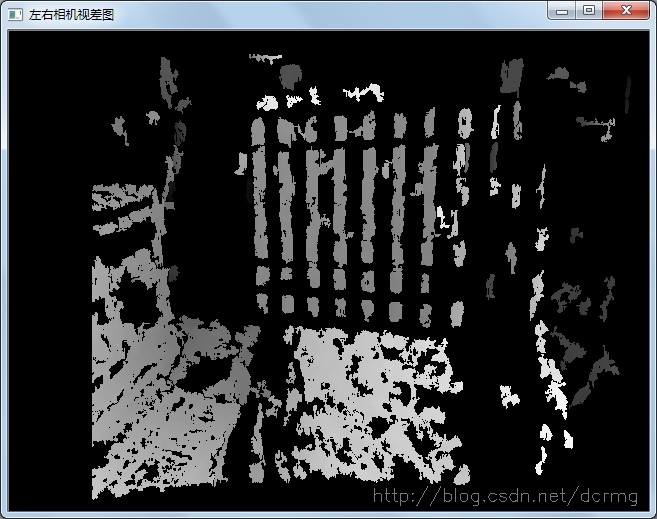
视差用亮度表示,越亮表示当前位置距离相机越远。
双目相机标定以及立体测距原理及OpenCV实现的更多相关文章
- Halocn双目相机标定
[Halcon]Halcon双目标定 相机标定(4)---基于halcon的双目立体视觉标定 双目立体视觉:四(双目标定matlab,图像校正,图像匹配,计算视差,disparity详解,) 双目测距 ...
- 【视频开发】【计算机视觉】相机标定(Camera calibration)原理、步骤
相机标定(Camera calibration)原理.步骤 author@jason_ql(lql0716) http://blog.csdn.net/lql0716 在图像测量过程以及机器视觉应用 ...
- 学习OpenCV双目测距原理及常见问题解答
学习OpenCV双目测距原理及常见问题解答 转自博客:https://blog.csdn.net/angle_cal/article/details/50800775 一. 整体思路和问题转化. 图 ...
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
相机标定 一.相机标定的目的 确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数. 二.通用摄像机模型 世界坐标系.摄像机坐标 ...
- Camera Calibration 相机标定:原理简介(五)
5 基于2D标定物的标定方法 基于2D标定物的标定方法,原理与基于3D标定物相同,只是通过相机对一个平面进行成像,就可得到相机的标定参数,由于标定物为平面,本身所具有的约束条机,相对后者标定更为简单. ...
- Camera Calibration 相机标定:原理简介(四)
4 基于3D标定物的标定方法 使用基于3D标定物进行相机标定,是一种传统且常见的相机标定法.3D标定物在不同应用场景下不尽相同,摄影测量学中,使用的3D标定物种类最为繁杂,如图-1的室内控制场,由多条 ...
- Autoware 进行 Robosense-16 线雷达与 ZED 双目相机联合标定!
项目要标定雷达和相机,这里记录下我标定过程,用的速腾 Robosense - 16 线雷达和 ZED 双目相机. 一.编译安装 Autoware-1.10.0 我没有安装最新版本的 Autoware, ...
- Camera Calibration 相机标定:原理简介(三)
3 绝对圆锥曲线 在进一步了解相机标定前,有必要了解绝对圆锥曲线(Absolute Conic)这一概念. 对于一个3D空间的点x,其投影空间的坐标为:x~=[x1,x2,x3,x4]T.我们定义无穷 ...
- Camera Calibration 相机标定:原理简介(二)
2 针孔相机模型 常见的相机标定中,使用的相机多为针孔相机(Pinhole camera),也就是大家熟知的小孔成像理论.将其中涉及的坐标系之间的相互转换抽离出来,即为针孔相机模型的核心. 上图所示的 ...
随机推荐
- Geodatabase模型
原文 Geodatabase模型 地理数据模型是地理实体及其关系的形式化抽象和数学描述.随着数据库.面向对象等技术的发展,面向对象的地理数据模型成为大型空间数据库的首选方案,它克服了传统地理数据模型的 ...
- centos中的配置文件 分类: B3_LINUX 2015-04-03 22:21 184人阅读 评论(0) 收藏
/etc/profile:此文件为系统的每个用户设置环境信息,当用户第一次登录时,该文件被执行.并从/etc/profile.d目录的配置文件中搜集shell的设置. /etc/bashrc:为每一个 ...
- 数学之路-python计算实战(7)-机器视觉-图像产生加性零均值高斯噪声
图像产生加性零均值高斯噪声.在灰度图上加上噪声,加上噪声的方式是每一个点的灰度值加上一个噪声值.噪声值的产生方式为Box-Muller算法生成高斯噪声. 在计算机模拟中,常常须要生成正态分布的数值.最 ...
- arm Linux 如何自动检测并mount SD卡,以及如何得知已经mount
一.土八路做法: SD 卡一旦插入系统,内核会自动在/dev/下创建设备文件:sdcard. 但有时可能时用户在拨出卡前并没有umount的话,第二次插卡进去后系统创建的就不是sdcard设备文件了, ...
- mac os 虚拟机安装
https://blog.csdn.net/u011415782/article/details/78505422 感谢
- https://www.cyberciti.biz/faq/howto-change-rename-user-name-id/
https://www.cyberciti.biz/faq/howto-change-rename-user-name-id/
- 特征点提取之Harris角点提取法
1. 特征点提取的意义 2.角点 3. Harris角点检測的基本原理 4.Harris角点检測算法的步骤 5.Harris角点提取算法设计 <span style="font-siz ...
- javascript中定义事件的三种方式 分类: C1_HTML/JS/JQUERY 2014-08-07 10:27 634人阅读 评论(0) 收藏
在javascript中,可以为某个元素指定事件,指定的方式有以下三种: 1.在html中,使用onclick属性 2.在javascript中,使用onclick属性 3.在javascipt中,使 ...
- MVC 设置项目默认起始页和多级目录的路由配置
我们新建一个MVC的项目 默认的路由是这样的,但是由于一些需求,我们需要对Controllers按照一些规则分类. 比如说我们在Controllers下面建了一个School的文件夹,然后建了一个St ...
- MySQL复制格式小结
基于语句级的复制 binlog=statement 优点: (1)binlog文件较小. (2)日志是包含用户执行的原始SQL,方便统计和审计. (3)出现最早可binlog.兼容较好. (4)b ...