18-ESP8266 SDK开发基础入门篇--TCP 服务器 RTOS版,串口透传,TCP客户端控制LED
https://www.cnblogs.com/yangfengwu/p/11112015.html
先规定一下协议
aa 55 02 01 F1 4C 控制LED点亮 F1 4C为CRC高位和低位
aa 55 02 00 30 8C 控制LED熄灭 30 8C为CRC高位和低位
aa 55 03 占空比(四字节 高位在前,低位在后) CRC校验高位,CRC校验低位
预留一个问题 我用客户端发送 aa 55 11 00 00 01 F4 WIFI接收到是 F4 01 00 00 00 01 F4
aa 55 10 XX XX XX 却没有问题 , 大家都没有遇到过这种情况吗???求解答
我认为是编码问题
但是我尝试了

好几个编码都会有问题,而且我用了手头的所有调试助手都是有问题..所以PWM先不做了,先做控制LED点亮和熄灭
改一下协议
00 01 70 C0 控制LED点亮 70 C0 为CRC高位和低位
00 00 B0 01 控制LED熄灭 B0 01 为CRC高位和低位
首先修改一个小小小bug ,其实这节咱用不到,只不过测试的时候发现的问题...
现在实现一个功能 透传(TCP客户端发送的数据,TCP服务器接收以后直接转发到串口;串口接收的数据TCP服务器直接发给TCP客户端)
首先说一下哈,咱的发送也用一个任务来执行
不过呢这个发送任务一定要在什么时候创建呢???
客户端连接以后为这个客户端创建一个发送任务

主要是避免,发送任务里面的变量别一进来其实是不存在的.......所以有了客户端连接再创建这个任务

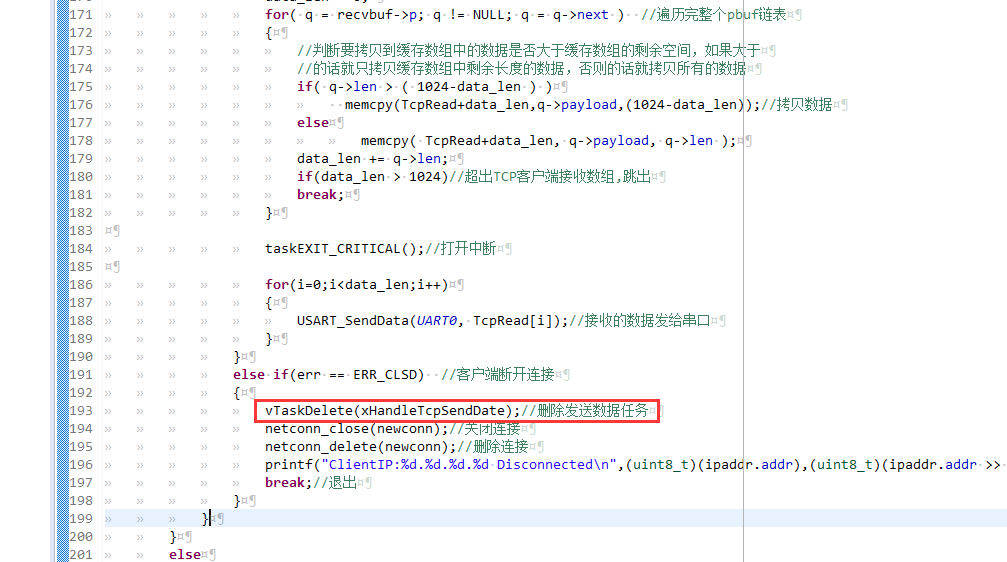
然后呢 ,还要解决一个问题,,假设客户端掉线了,咱是不是应该删除掉那个发送任务哈
所以
其实创建任务的时候最后一个变量,可以填这个变量

然后删除这个任务就是
其实和上一版程序没啥大区别,也就是上面的区别
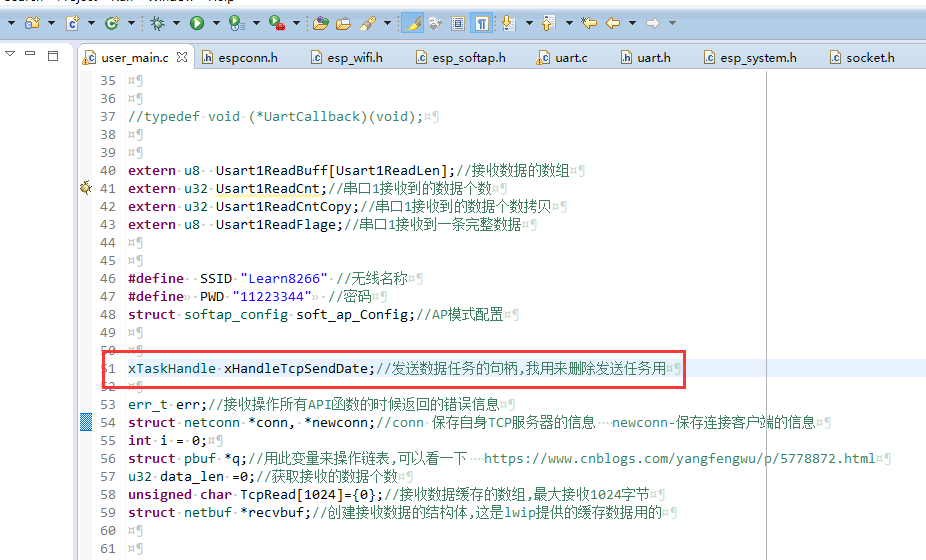
还有一个是,我把以前局部的变量设置成全局的了

对了其实
这两个一定是全局,因为我发送的时候用得到

其实其它的就没有什么了...(前提你把我前面的文章都学了)
/*
* ESPRSSIF MIT License
*
* Copyright (c) 2015 <ESPRESSIF SYSTEMS (SHANGHAI) PTE LTD>
*
* Permission is hereby granted for use on ESPRESSIF SYSTEMS ESP8266 only, in which case,
* it is free of charge, to any person obtaining a copy of this software and associated
* documentation files (the "Software"), to deal in the Software without restriction, including
* without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense,
* and/or sell copies of the Software, and to permit persons to whom the Software is furnished
* to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all copies or
* substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
*/ #include "esp_common.h"
#include "gpio.h"
#include "uart.h"
#include "esp_timer.h"
#include "hw_timer.h"
#include "pwm.h"
#include "data_dispose.h"
#include "espconn.h"
#include "esp_wifi.h"
#include "lwip/api.h" //typedef void (*UartCallback)(void); extern u8 Usart1ReadBuff[Usart1ReadLen];//接收数据的数组
extern u32 Usart1ReadCnt;//串口1接收到的数据个数
extern u32 Usart1ReadCntCopy;//串口1接收到的数据个数拷贝
extern u8 Usart1ReadFlage;//串口1接收到一条完整数据 #define SSID "Learn8266" //无线名称
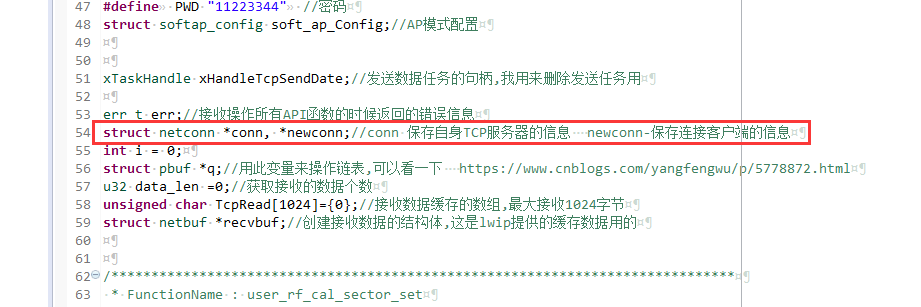
#define PWD "11223344" //密码
struct softap_config soft_ap_Config;//AP模式配置 xTaskHandle xHandleTcpSendDate;//发送数据任务的句柄,我用来删除发送任务用 err_t err;//接收操作所有API函数的时候返回的错误信息
struct netconn *conn, *newconn;//conn 保存自身TCP服务器的信息 newconn-保存连接客户端的信息
int i = ;
struct pbuf *q;//用此变量来操作链表,可以看一下 https://www.cnblogs.com/yangfengwu/p/5778872.html
u32 data_len =;//获取接收的数据个数
unsigned char TcpRead[]={};//接收数据缓存的数组,最大接收1024字节
struct netbuf *recvbuf;//创建接收数据的结构体,这是lwip提供的缓存数据用的 /******************************************************************************
* FunctionName : user_rf_cal_sector_set
* Description : SDK just reversed 4 sectors, used for rf init data and paramters.
* We add this function to force users to set rf cal sector, since
* we don't know which sector is free in user's application.
* sector map for last several sectors : ABCCC
* A : rf cal
* B : rf init data
* C : sdk parameters
* Parameters : none
* Returns : rf cal sector
*******************************************************************************/
uint32 user_rf_cal_sector_set(void)
{
flash_size_map size_map = system_get_flash_size_map();
uint32 rf_cal_sec = ; switch (size_map) {
case FLASH_SIZE_4M_MAP_256_256:
rf_cal_sec = - ;
break; case FLASH_SIZE_8M_MAP_512_512:
rf_cal_sec = - ;
break; case FLASH_SIZE_16M_MAP_512_512:
case FLASH_SIZE_16M_MAP_1024_1024:
rf_cal_sec = - ;
break; case FLASH_SIZE_32M_MAP_512_512:
case FLASH_SIZE_32M_MAP_1024_1024:
rf_cal_sec = - ;
break; default:
rf_cal_sec = ;
break;
} return rf_cal_sec;
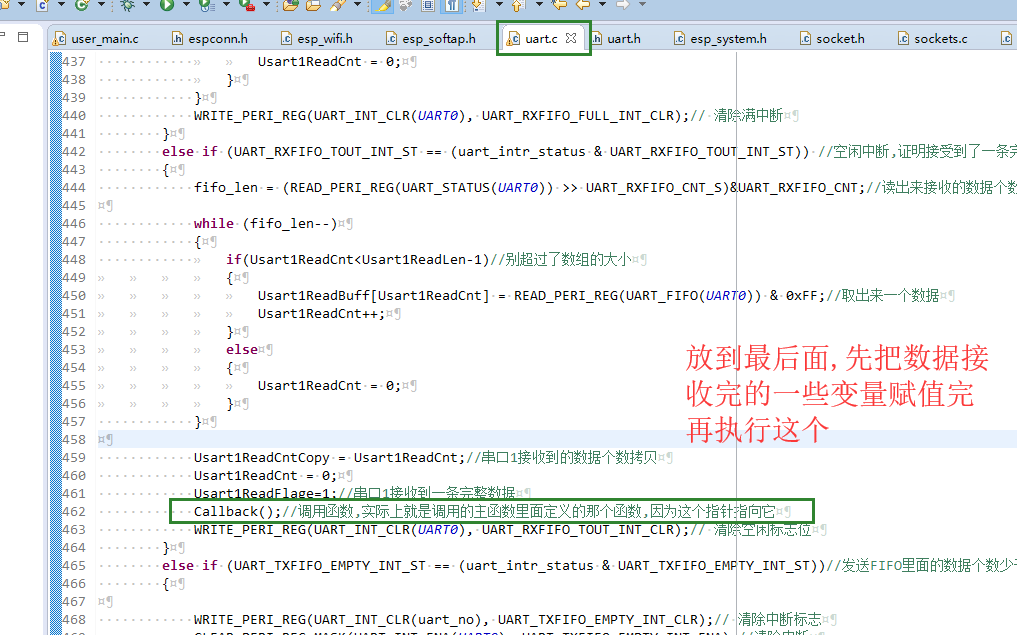
} //串口调用此函数就说明接收到了一条完整的数据,就可以去处理了
void UartReadCallback()//定义一个函数
{ } //发送数据任务
void TcpSendDateThread(void *date)
{
conn->send_timeout=;//设置发送超时时间,一定要加,否则任务就阻塞住了
while()
{
if(Usart1ReadFlage)//串口接收到一条完整的数据
{
Usart1ReadFlage = ;
err = netconn_write(newconn ,Usart1ReadBuff,Usart1ReadCntCopy ,NETCONN_COPY);//发送数据
if(err != ERR_OK)
{
//发送失败
}
}
vTaskDelay(/portTICK_RATE_MS);//如果没有数据要发送会执行这个,一定要加这个任务延时哈
}
vTaskDelete(NULL);
} void TcpServerThread(void *date)
{
static ip_addr_t ipaddr;//存储客户端的地址
static u16_t port;//存储客户端的端口号 conn = netconn_new(NETCONN_TCP);//创建一个TCP //注意哈,首先要明白你无论创建 TCP服务器或者客户端,或者UDP,你创建的时候必须设置下TCP服务器或者客户端,或者UDP的IP地址和端口号.
//网络之间通信嘛,这是必须的,只有你有IP和端口号了,别人才能和你通信
netconn_bind(conn,IP_ADDR_ANY,); //设置conn(TCP服务器) 的IP地址是自己网卡上的IP 设置TCP服务器通信的端口号是8888 (无论创建 TCP服务器或者客户端,或者UDP,都是必须的) netconn_listen(conn); //使用监听函数,说明是创建TCP服务器,只有作为服务器才是监听客户端连接嘛 //设置任务阻塞时间为10ms (注意哈,这个和vTaskDelay(10/portTICK_RATE_MS)类似,但是一定要用这个
//下面的netconn_accept(conn,&newconn);函数是完全阻塞的,,如果你不设置conn->recv_timeout 程序就停止在那里了,除非有客户端连接
conn->recv_timeout=;//任务延时5ms
while()
{
err = netconn_accept(conn,&newconn);//等待客户端连接,有客户机连接,或者超时了就会往下执行
if (err == ERR_OK)//只有客户机连接了,并且没有其它错误才会进入
{
netconn_getaddr(newconn,&ipaddr,&port,); //得到客户端的IP地址和端口号 最后一个参数 1获取本地IP地址,0获取远程IP地址
//打印客户端的IP地址
printf("ClientIP:%d.%d.%d.%d Connected\n",(uint8_t)(ipaddr.addr),(uint8_t)(ipaddr.addr >> ),(uint8_t)(ipaddr.addr >> ),(uint8_t)(ipaddr.addr >> ));
printf("Port:%d\n",port);//打印客户端的端口号 xTaskCreate(TcpSendDateThread, "TcpSendDateThread", , NULL, , &xHandleTcpSendDate);//创建发送数据任务 while()//一直在这个里面接收处理数据
{
err = netconn_recv(newconn,&recvbuf);//如果一直接受不到数据或者不是其它错误信息,不会往下执行
if(err== ERR_OK)//接收到客户端发过来的数据
{
taskENTER_CRITICAL();//关闭中断,禁止其它任务打断,防止读数据出现错误 data_len = ;
for( q = recvbuf->p; q != NULL; q = q->next ) //遍历完整个pbuf链表
{
//判断要拷贝到缓存数组中的数据是否大于缓存数组的剩余空间,如果大于
//的话就只拷贝缓存数组中剩余长度的数据,否则的话就拷贝所有的数据
if( q->len > ( -data_len ) )
memcpy(TcpRead+data_len,q->payload,(-data_len));//拷贝数据
else
memcpy( TcpRead+data_len, q->payload, q->len );
data_len += q->len;
if(data_len > )//超出TCP客户端接收数组,跳出
break;
} taskEXIT_CRITICAL();//打开中断 for(i=;i<data_len;i++)
{
USART_SendData(UART0, TcpRead[i]);//接收的数据发给串口
}
}
else if(err == ERR_CLSD) //客户端断开连接
{
vTaskDelete(xHandleTcpSendDate);//删除发送数据任务
netconn_close(newconn);//关闭连接
netconn_delete(newconn);//删除连接
printf("ClientIP:%d.%d.%d.%d Disconnected\n",(uint8_t)(ipaddr.addr),(uint8_t)(ipaddr.addr >> ),(uint8_t)(ipaddr.addr >> ),(uint8_t)(ipaddr.addr >> ));
break;//退出
}
}
}
else
{
conn->recv_timeout=;//任务延时10ms
}
}
vTaskDelete(NULL);
} void LedThread(void *date)
{
while()
{
vTaskDelay(/portTICK_RATE_MS);
GPIO_OUTPUT_SET(,-GPIO_INPUT_GET());
}
vTaskDelete(NULL);
} /******************************************************************************
* FunctionName : user_init
* Description : entry of user application, init user function here
* Parameters : none
* Returns : none
*******************************************************************************/
void user_init(void)
{
GPIO_OUTPUT_SET(, );
GPIO_OUTPUT_SET(, );//让两个灯初始的状态一样,GOIO2是反接的,0的时候是亮
// GPIO_OUTPUT_SET(5, 0);
uart_init_new();
printf("SDK version:%s\n", system_get_sdk_version());
// printf("Ai-Thinker Technology Co. Ltd.\r\n%s %s\r\n", __DATE__, __TIME__);
// printf("Hello,World!\r\n");
// xTaskCreate(LedControl, "LedControl", 1024, NULL, 11, NULL);
wifi_set_opmode(STATIONAP_MODE);//配置WiFi的模式STATION + AP AP--连接WIFI自身的无线实现通信 STATION--wifi连接路由器,手机或者电脑也连接路由器,实现通信
soft_ap_Config.ssid_len = strlen(SSID);//热点名称长度,与你实际的名称长度一致就好
memcpy(soft_ap_Config.ssid,SSID,soft_ap_Config.ssid_len);//实际热点名称设置,可以根据你的需要来
memcpy(soft_ap_Config.password,PWD,strlen(PWD));//热点密码设置
soft_ap_Config.authmode = AUTH_WPA2_PSK;//加密模式
soft_ap_Config.channel = ;//信道,共支持1~13个信道
soft_ap_Config.max_connection = ;//最大连接数量,最大支持四个,默认四个 wifi_softap_set_config_current(&soft_ap_Config);//设置 Wi-Fi SoftAP 接口配置,不保存到 Flash
// wifi_softap_set_config(&soft_ap_Config);//设置 Wi-Fi SoftAP 接口配置,保存到 Flash //下面的函数大家点进去一看注释就明白了
// espconn_init();//"espconn.h" 195行
// TcpServer.type = ESPCONN_TCP; //创建TCP
// TcpServer.state = ESPCONN_NONE; //一开始的状态
// TcpServer.proto.tcp = &esptcp; //设置TCP的IP和回调函数存储用
// TcpServer.proto.tcp->local_port = 8888;//监听的端口号
// espconn_regist_connectcb(&TcpServer, TcpServerListen);//注册
// espconn_accept(&TcpServer);//启动监听
UartCallbackRegister(UartReadCallback);//把 UartReadCallback 函数地址传过去,在串口里面调用 xTaskCreate(TcpServerThread, "TcpServerThread", , NULL, , NULL); xTaskCreate(LedThread, "LedThread", , NULL, , NULL);
}
测试

现在写控制灯亮灭的程序
00 01 70 C0 控制LED点亮 70 C0 为CRC高位和低位
00 00 B0 01 控制LED熄灭 B0 01 为CRC高位和低位
最简单的
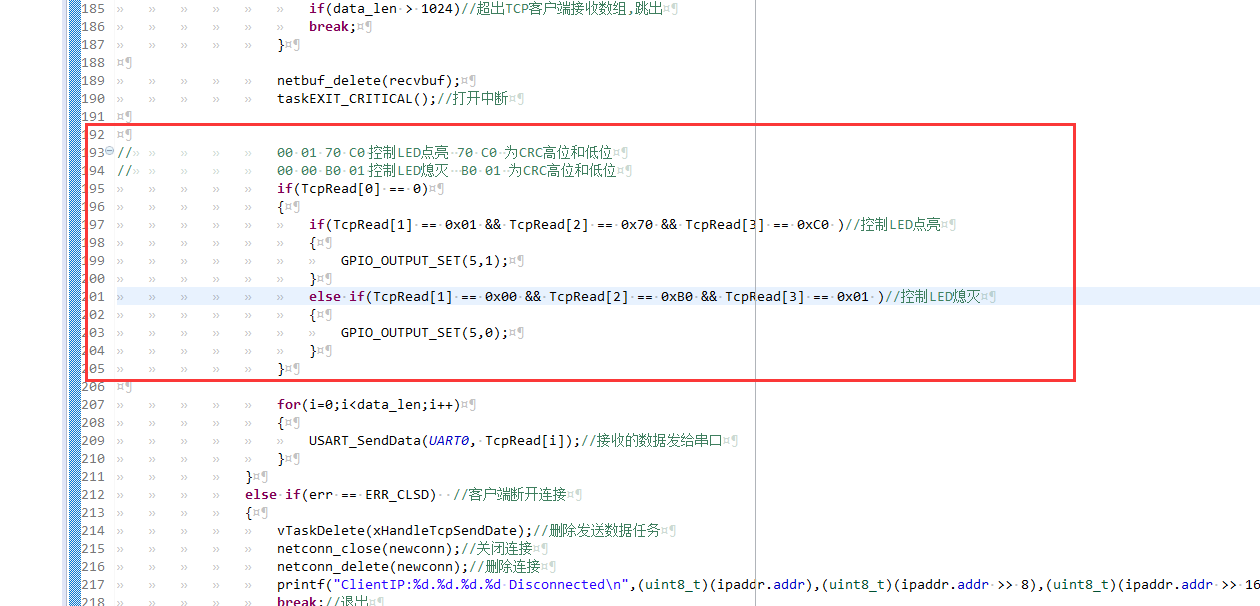
// 00 01 70 C0 控制LED点亮 70 C0 为CRC高位和低位
// 00 00 B0 01 控制LED熄灭 B0 01 为CRC高位和低位
if(TcpRead[] == )
{
if(TcpRead[] == 0x01 && TcpRead[] == 0x70 && TcpRead[] == 0xC0 )//控制LED点亮
{
GPIO_OUTPUT_SET(,);
}
else if(TcpRead[] == 0x00 && TcpRead[] == 0xB0 && TcpRead[] == 0x01 )//控制LED熄灭
{
GPIO_OUTPUT_SET(,);
}
}
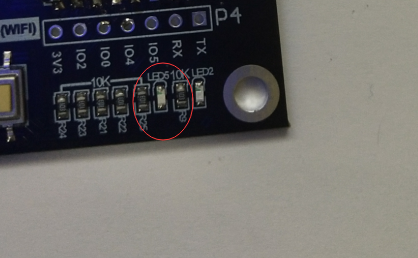
测试



好下节咱做C# TCP客户端,控制LED
说一下哈 那个CRC咱先不上菜...咱先简简单单的学
我给大家了一个计算工具
https://www.cnblogs.com/yangfengwu/p/11192594.html
18-ESP8266 SDK开发基础入门篇--TCP 服务器 RTOS版,串口透传,TCP客户端控制LED的更多相关文章
- 29-ESP8266 SDK开发基础入门篇--编写TCP 客户端程序(Lwip RAW模式,非RTOS版,精简入门)
https://www.cnblogs.com/yangfengwu/p/11456667.html 由于上一节的源码长时间以后会自动断开,所以再做这一版非RTOS版的,咱直接用lua源码里面别人写的 ...
- 24-ESP8266 SDK开发基础入门篇--Android TCP客户端.控制 Wi-Fi输出PWM的占空比,调节LED亮度
https://www.cnblogs.com/yangfengwu/p/11204436.html 刚才有人说需要点鸡汤.... 我想想哈;我还没问关于哪方面的鸡汤呢!!! 我所一直走的路线 第一: ...
- 16-ESP8266 SDK开发基础入门篇--TCP 服务器 非RTOS运行版,串口透传(串口回调函数处理版)
https://www.cnblogs.com/yangfengwu/p/11105466.html 其实官方给的RTOS的版本就是在原先非RTOS版本上增加的 https://www.cnblogs ...
- 28-ESP8266 SDK开发基础入门篇--编写wifi模块TCP 客户端程序(官方API版,非RTOS版)
https://www.cnblogs.com/yangfengwu/p/11432795.html 注:这节实现的功能是WIFI模块作为TCP 客户端,连接咱的TCP服务器,然后实现透传 本来想着做 ...
- 22-ESP8266 SDK开发基础入门篇--编写Android TCP客户端 , 连接和断开
https://www.cnblogs.com/yangfengwu/p/11192618.html 有些很细致的东西参考这篇 https://www.cnblogs.com/yangfengwu ...
- 17-ESP8266 SDK开发基础入门篇--TCP服务器 RTOS版,小试牛刀
https://www.cnblogs.com/yangfengwu/p/11105466.html 现在开始写... lwip即可以用socket 的API 也可以用 netconn 的API实 ...
- 23-ESP8266 SDK开发基础入门篇--编写Android TCP客户端 , 加入消息处理
https://www.cnblogs.com/yangfengwu/p/11203546.html 先做接收消息 然后接着 public class MainActivity extends App ...
- 1-ESP8266 SDK开发基础入门篇--开发环境搭建
因为今天终于做好了自己的另一块工控板,所以我就开始写基础公开篇的内容,希望自己小小的努力能够帮到大家 自己做的另一块板子 https://www.cnblogs.com/yangfengwu/cate ...
- 25-ESP8266 SDK开发基础入门篇--控制WIFI连接路由器
https://www.cnblogs.com/yangfengwu/p/11324411.html 说个事情,现在SDK的版本已经出到3.0了,但是我还是使用2.0 如果只是为了学习研究 选择3 ...
随机推荐
- nginx静态文件不设置缓存
找到nginx安装目录下的nginx.conf文件,再nginx里面添加如下的内容 location / { add_header Cache-Control no-cache; add_header ...
- 【翻译】REST framework JWT Auth(django rest framework-jwt)
JWT认证的REST框架 原文链接 概述 这个包提供对Django REST framework的JSON Web Token 认证支持. 需要满足条件 Python (2.7, 3.3, 3.4, ...
- JS中的逻辑运算符&&、||
原文:JS中的逻辑运算符&&.|| 1.JS中的||符号: 运算方法: 只要"||"前面为false,不管"||"后面是true还是false, ...
- 阿里巴巴 Java 开发手册 (五) 集合处理
1. [强制]关于 hashCode 和 equals 的处理,遵循如下规则: 1) 只要重写 equals,就必须重写 hashCode. 2) 因为 Set 存储的是不重复的对象,依据 hashC ...
- SpringBoot启动原理详解
SpringBoot和Spring相比,有着不少优势,比如自动配置,jar直接运行等等.那么SpringBoot到底是怎么启动的呢? 下面是SpringBoot启动的入口: @SpringBootAp ...
- js中逻辑或的作用
var config = null; undefined var result = config||{}; undefined result {} var config = undefined; un ...
- day 06 预科
目录 if判断 if判断习题 for循环 for循环习题 微信机器人 if判断 # 一条狗朝你过来了,你会干吗? 判断: 如果狗是大长腿牵来的狗--->打招呼:如果是条疯狗,跑. # if:如果 ...
- django 的form登录 注册
#!/usr/bin/env python # -*- coding: utf8 -*- #__Author: "Skiler Hao" #date: 2017/3/30 15:4 ...
- CASE WHEN 函数
--Case函数: --有两种格式: -- 1.简单Case函数. -- 2.Case搜索函数. --1.简单Case函数: -- CASE [COLUMN_NAME] -- WHEN ['条件参数' ...
- python笔记--------一
作用域: 每个变量或函数都有自己的作用域. 每个函数都定义了一个命名空间,也称为作用域. 在最顶层有一个符号表会跟踪这一层所有的名称定义和和他们当前的绑定. 调用函数时,会建立一个新的符号表(常称为栈 ...