浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容:
- gOMP的算法流程
- gOMP的MATLAB实现
- 一维信号的实验与结果
- 稀疏度K与重构成功概率关系的实验与结果
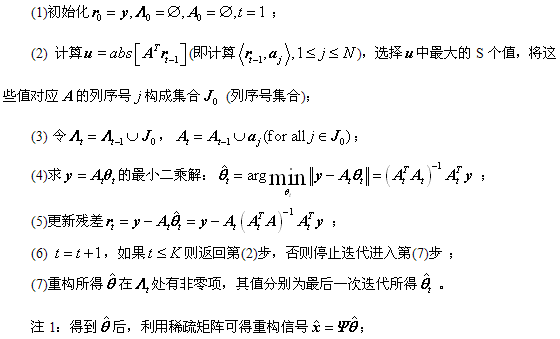
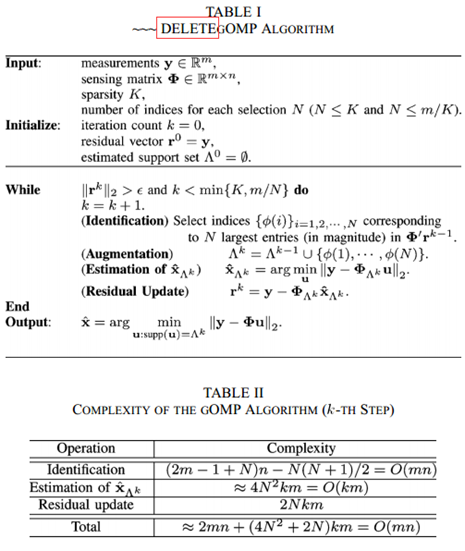
一、gOMP的算法流程
广义正交匹配追踪(Generalized OMP, gOMP)算法可以看作为OMP算法的一种推广。OMP每次只选择与残差相关最大的一个,而gOMP则是简单地选择最大的S个。之所以这里表述为"简单地选择"是相比于ROMP之类算法的,不进行任何其它处理,只是选择最大的S个而已。
gOMP的算法流程:

二、gOMP的MATLAB实现(CS_gOMP.m)
function [ theta ] = CS_gOMP( y,A,K,S )
% CS_gOMP
% Detailed explanation goes here
% y = Phi * x
% x = Psi * theta
% y = Phi*Psi * theta
% 令 A = Phi*Psi, 则y=A*theta
% 现在已知y和A,求theta
% Reference: Jian Wang, Seokbeop Kwon, Byonghyo Shim. Generalized
% orthogonal matching pursuit, IEEE Transactions on Signal Processing,
% vol. , no. , pp. -, Dec. .
% Available at: http://islab.snu.ac.kr/paper/tsp_gOMP.pdf
if nargin <
S = round(max(K/, ));
end
[y_rows,y_columns] = size(y);
if y_rows<y_columns
y = y';%y should be a column vector
end
[M,N] = size(A);%传感矩阵A为M*N矩阵
theta = zeros(N,);%用来存储恢复的theta(列向量)
Pos_theta = [];%用来迭代过程中存储A被选择的列序号
r_n = y;%初始化残差(residual)为y
for ii=:K%迭代K次,K为稀疏度
product = A'*r_n;%传感矩阵A各列与残差的内积
[val,pos]=sort(abs(product),'descend');%降序排列
Sk = union(Pos_theta,pos(:S));%选出最大的S个
if length(Sk)==length(Pos_theta)
if ii ==
theta_ls = ;
end
break;
end
if length(Sk)>M
if ii ==
theta_ls = ;
end
break;
end
At = A(:,Sk);%将A的这几列组成矩阵At
%y=At*theta,以下求theta的最小二乘解(Least Square)
theta_ls = (At'*At)^(-1)*At'*y;%最小二乘解
%At*theta_ls是y在At)列空间上的正交投影
r_n = y - At*theta_ls;%更新残差
Pos_theta = Sk;
if norm(r_n)<1e-
break;%quit the iteration
end
end
theta(Pos_theta)=theta_ls;%恢复出的theta
end
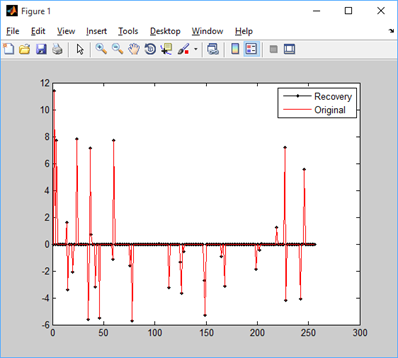
三、一维信号的实验与结果
%压缩感知重构算法测试
clear all;close all;clc;
M = ;%观测值个数
N = ;%信号x的长度
K = ;%信号x的稀疏度
Index_K = randperm(N);
x = zeros(N,);
x(Index_K(:K)) = *randn(K,);%x为K稀疏的,且位置是随机的
Psi = eye(N);%x本身是稀疏的,定义稀疏矩阵为单位阵x=Psi*theta
Phi = randn(M,N)/sqrt(M);%测量矩阵为高斯矩阵
A = Phi * Psi;%传感矩阵
y = Phi * x;%得到观测向量y %% 恢复重构信号x
tic
theta = CS_gOMP( y,A,K);
x_r = Psi * theta;% x=Psi * theta
toc %% 绘图
figure;
plot(x_r,'k.-');%绘出x的恢复信号
hold on;
plot(x,'r');%绘出原信号x
hold off;
legend('Recovery','Original')
fprintf('\n恢复残差:');
norm(x_r-x)%恢复残差
四、稀疏数K与重构成功概率关系的实验与结果
% 压缩感知重构算法测试CS_Reconstuction_KtoPercentagegOMP.m
% Reference: Jian Wang, Seokbeop Kwon, Byonghyo Shim. Generalized
% orthogonal matching pursuit, IEEE Transactions on Signal Processing,
% vol. , no. , pp. -, Dec. .
% Available at: http://islab.snu.ac.kr/paper/tsp_gOMP.pdf clear all;close all;clc;
addpath(genpath('../../OMP/')) %% 参数配置初始化
CNT = ; %对于每组(K,M,N),重复迭代次数
N = ; %信号x的长度
Psi = eye(N); %x本身是稀疏的,定义稀疏矩阵为单位阵x=Psi*theta
M_set = []; %测量值集合
KIND = ['OMP ';'ROMP ';'StOMP ';'SP ';'CoSaMP ';...
'gOMP(s=3)';'gOMP(s=6)';'gOMP(s=9)'];
Percentage = zeros(N,length(M_set),size(KIND,)); %存储恢复成功概率 %% 主循环,遍历每组(K,M,N)
tic
for mm = :length(M_set)
M = M_set(mm); %本次测量值个数
K_set = ::; %信号x的稀疏度K没必要全部遍历,每隔5测试一个就可以了
%存储此测量值M下不同K的恢复成功概率
PercentageM = zeros(size(KIND,),length(K_set));
for kk = :length(K_set)
K = K_set(kk); %本次信号x的稀疏度K
P = zeros(,size(KIND,));
fprintf('M=%d,K=%d\n',M,K);
for cnt = :CNT %每个观测值个数均运行CNT次
Index_K = randperm(N);
x = zeros(N,);
x(Index_K(:K)) = *randn(K,); %x为K稀疏的,且位置是随机的
Phi = randn(M,N)/sqrt(M); %测量矩阵为高斯矩阵
A = Phi * Psi; %传感矩阵
y = Phi * x; %得到观测向量y
%()OMP
theta = CS_OMP(y,A,K); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
%()ROMP
theta = CS_ROMP(y,A,K); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
%()StOMP
theta = CS_StOMP(y,A); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
%()SP
theta = CS_SP(y,A,K); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
%()CoSaMP
theta = CS_CoSaMP(y,A,K); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
%()gOMP,S=
theta = CS_gOMP(y,A,K,); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
%()gOMP,S=
theta = CS_gOMP(y,A,K,); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
%()gOMP,S=
theta = CS_gOMP(y,A,K,); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P() = P() + ;
end
end
for iii = :size(KIND,)
PercentageM(iii,kk) = P(iii)/CNT*; %计算恢复概率
end
end
for jjj = :size(KIND,)
Percentage(:length(K_set),mm,jjj) = PercentageM(jjj,:);
end
end
toc
save KtoPercentage1000gOMP %运行一次不容易,把变量全部存储下来 %% 绘图
S = ['-ks';'-ko';'-yd';'-gv';'-b*';'-r.';'-rx';'-r+'];
figure;
for mm = :length(M_set)
M = M_set(mm);
K_set = ::;
L_Kset = length(K_set);
for ii = :size(KIND,)
plot(K_set,Percentage(:L_Kset,mm,ii),S(ii,:)); %绘出x的恢复信号
hold on;
end
end
hold off;
xlim([ ]);
legend('OMP','ROMP','StOMP','SP','CoSaMP',...
'gOMP(s=3)','gOMP(s=6)','gOMP(s=9)');
xlabel('Sparsity level K');
ylabel('The Probability of Exact Reconstruction');
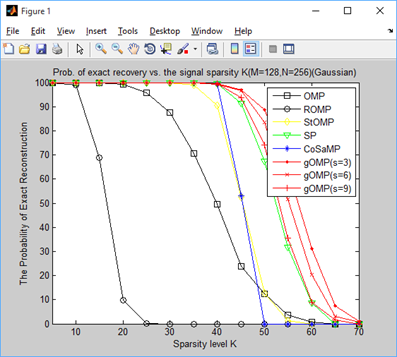
title('Prob. of exact recovery vs. the signal sparsity K(M=128,N=256)(Gaussian)');
结论:gOMP只是在OMP基础上修改了一下原子选择的个数,效果就好很多。
六、参考文章
http://blog.csdn.net/jbb0523/article/details/45693027
浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)的更多相关文章
- [转]压缩感知重构算法之分段正交匹配追踪(StOMP)
分段正交匹配追踪(StagewiseOMP)或者翻译为逐步正交匹配追踪,它是OMP另一种改进算法,每次迭代可以选择多个原子.此算法的输入参数中没有信号稀疏度K,因此相比于ROMP及CoSaMP有独到的 ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
- 浅谈压缩感知(二十二):压缩感知重构算法之正则化正交匹配追踪(ROMP)
主要内容: ROMP的算法流程 ROMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 一.ROMP的算法流程 正则化正交匹配追踪ROMP算法流程与OMP的最大不同之 ...
- 浅谈压缩感知(二十六):压缩感知重构算法之分段弱正交匹配追踪(SWOMP)
主要内容: SWOMP的算法流程 SWOMP的MATLAB实现 一维信号的实验与结果 门限参数a.测量数M与重构成功概率关系的实验与结果 SWOMP与StOMP性能比较 一.SWOMP的算法流程 分段 ...
- 浅谈压缩感知(二十一):压缩感知重构算法之正交匹配追踪(OMP)
主要内容: OMP的算法流程 OMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.OMP的算法流程 二.OMP的MATL ...
- 浅谈压缩感知(九):正交匹配追踪算法OMP
主要内容: OMP算法介绍 OMP的MATLAB实现 OMP中的数学知识 一.OMP算法介绍 来源:http://blog.csdn.net/scucj/article/details/7467955 ...
- VMware vSphere 服务器虚拟化之二十八 桌面虚拟化之安装View传输服务器
VMware vSphere 服务器虚拟化之二十八 桌面虚拟化之安装View传输服务器 View 传输服务器用于管理和简化数据中心与在最终用户本地系统上检出使用的 View 桌面之间的数据传输.必须安 ...
- (转载)Android项目实战(二十八):Zxing二维码实现及优化
Android项目实战(二十八):Zxing二维码实现及优化 前言: 多年之前接触过zxing实现二维码,没想到今日项目中再此使用竟然使用的还是zxing,百度之,竟是如此牛的玩意. 当然,项目中 ...
- Bootstrap <基础二十八>列表组
列表组.列表组件用于以列表形式呈现复杂的和自定义的内容.创建一个基本的列表组的步骤如下: 向元素 <ul> 添加 class .list-group. 向 <li> 添加 cl ...
随机推荐
- asp.net GDI+绘制折线
using System; using System.Collections.Generic; using System.Linq; using System.Web; using System.We ...
- 循序渐进Python3(三) -- 2 -- 内置函数
上一篇我们介绍了21个最常用到的函数,简单列一下,帮助回忆巩固: 1.abs 2.dict 3.float 4.help 5.input 6.int 7.len 8.list 9.max 10.min ...
- centos7 u盘启动路径设置
进入安装页面选择install centos7,按tab按键,设置路径如下 vmlinuz initrd=initrd.img inst.stage2=hd:/dev/sdb4 quiet
- golang使用interface来mock进行测试(来自dotGO2014)
源自于dotGO 2014的视频,讲述如何使用 interface 来mock 进行测试.. 可以FQ的同学自己观看,这里把重要的一些代码给截图搬到国内了 https://www.youtube.co ...
- CSS颜色名称和颜色值
aliceblue:艾利斯兰 #F0F8FF antiquewhite:古董白 #FAEBD7 aqua:浅绿色 #00FFFF aquamarine:碧绿色 #7FFFD4 azure:天蓝色 #F ...
- 咏南IOCP REST中间件
咏南IOCP REST中间件 让DELPHI7也能编写REST服务. 使用IOCP通信+UNIDAC数据库引擎. 客户端跨开发语言调用.
- delphi 10.1 berlin最新的开发框架:咏南中间件+咏南开发框架,购买后提供全部的源码
咏南中间件+咏南开发框架支持最新的delphi 10.1(berlin),老用户提供免费升级. 购买提供:中间件源码 附带福利(赠送): CS开发框架源码BS开发框架源码移动APP源码中间件集群源码二 ...
- poi管道流的导入导出
/** * 导入学生信息 * * @param classid * @param uploadFilePath * @return */ public boolean uploadStudentFil ...
- 使用事件等待句柄EventWaitHandler 实现生产者、消费者队列
using System; using System.Threading; using System.Collections.Generic; class ProducerConsumerQueue ...
- Mac上的抓包工具Charles
http://blog.csdn.net/jiangwei0910410003/article/details/41620363 $********************************** ...