三角网格上的寻路算法Part.2—A*算法
背景
继上一篇三角网格Dijkstra寻路算法之后,本篇将继续介绍一种更加智能,更具效率的寻路算法—A*算法,本文将首先介绍该算法的思想原理,再通过对比来说明二者之间的相同与不同之处,然后采用类似Dijkstra方式实现算法,算法利用了二叉堆数据结构,最后再通过一些小实验的效果展示其寻路效果。
搜索方法之启发式搜索
我们知道之所以Dijkstra算法并不高效,即使采用了好的数据结构优化,原因在于访问的节点数量太多。而A*相比于Dijkstra的优势就在于利用了更多的信息、访问更少的节点。为了方便理解A*,我们先抛开最短路径不谈,首先来介绍一下图的搜寻。我们知道在所有能被抽象为Graph的数据结构上搜索一个特定节点,我们可以采用遍历的方式。BFS(Breath-First)遍历和DFS(Depth-First)遍历,这是所有有数据结构基础的人都了解的基本图遍历方法,当然在搜索问题中,大可不必遍历所有节点,只需在遍历到终点时跳出即可。为了实现搜索节点,我们可以采用BFS和DFS这两种方式。在图G上,给定一个起点S和一个终点E,图的BFS搜索方法主要逻辑如下:
1 TravelSearch_BFS(G,S,E)
2 创建空队列容器Q
3 将S置为已访问并加入Q
4 While(Q不为空)
5 从Q中取出一个节点P
6 对P的所有邻居n
7 若n未被访问过
8 若n==E,则找到终点E,算法结束
9 将n置为已访问并加入Q
10 算法结束,未能找到终点E
DFS搜索方法(非递归式)主要逻辑如下:
1 TravelSearch_DFS(G,S,E)
2 创建空栈容器Q
3 将S置为已访问并加入Q
4 While(Q不为空)
5 从Q中取出一个节点P
6 对P的所有邻居n
7 若n未被访问过
8 若n==E,则找到终点E,算法结束
9 将n置为已访问并加入Q
10 算法结束,未能找到终点E
可以看出,DFS搜索和BFS搜索的关键区别在容器Q上,DFS采用LIFO的栈结构,而BFS则采用的是FIFO的队列结构。假如我们像下面这样做一个方格图,然后设置好起点和终点,规定好每个格子访问邻居的顺序为左→右→下→上的话,在这之上的DFS/BFS搜寻的演示动画已经寻路开销如下图所示:
 |
 |
| DFS(Depth-First)寻找终点E动画 | BFS(Breath-First)寻找终点E动画 |
可以看出仅仅是容器不一样,寻找终点访问的节点数也不一样。也就是说,容器Q的进出方式可以影响到搜寻的开销。所以我们不难想到,如果一个更加“聪明”的容器Q能够按某种优先级去弹出节点,我们就有可能更早的找到需要的节点,从而避免访问过多其他节点。事实上在方格图G上这样的一个“智能”一点的容器完全可以设计出来,只需充分利用一下方格图的特点。我们令起始方格为(1,4),终止方格为(6,10),我们根据对方格图的先验了解可以知道,起点与终点的坐标暗含了他们的位置信息,例如从S(1,4)搜寻E(6,10),显然从S出发向着“东南”方向搜寻,发现终点的可能性更大。我们根据每一个方格节点的坐标,能够求出到E的欧式距离。这样,我们完全可以设计一个与无脑的Depth-First和Breath-First不同的搜索方式,我们称其为“Best-First”。这个Best-First搜索的代码结构和BFS/DFS差不多,但关键的区别是从容器中弹出元素不再是LIFO或是FIFO方式,而是选择一个离E欧式距离更近的节点。选择离E距离更近的节点弹出的原因是我们经验上认为这样使搜索“离找到E更近了一步”。能够判断远近是方格图的特点决定的,因为不是任何无向带权图都有所谓“距离”或者“节点坐标”这样的概念。我们利用方格图的先验信息设计了这样一个Best-First智能搜寻算法。支持这个算法的容器Q我们可以设计为一个二叉堆之类的堆容器,这样可以支持高效取最值操作。这个Q每次Pop出的元素都是Q中离终点E最近的,算法逻辑可用下面的伪代码表示:
1 TravelSearch_BestFirst(G,S,E)
2 创建空堆容器Q
3 将S置为已访问并加入Q
4 While(Q不为空)
5 从Q中取出一个节点P(即P是Q中距离E最近的格子)
6 对P的所有邻居n
7 若n未被访问过
8 若n==E,则找到终点E,算法结束
9 将n置为已访问并加入Q
10 算法结束,未能找到终点E
让我们看看他的执行效果:
这一看我们设计的Best-First果然比DFS和BFS更直接了当,几乎是一路冲向终点,这样只遍历了很少的节点就找到终点。不过我们的方格图可没这么简单,一般来说是有点障碍物的,所以我们就设计一个有障碍物的方格图,用红叉方格表示,然后让这三种方法再去跑一遍,结果如下:
 |
 |
 |
| Depth-First | Breath-First | Best-First |
可以看出有障碍物的时候Best-First也能够巧妙的绕过去再冲向终点,也就是说,这个Best-First是一个方格图上寻路的好方法。一般都能比无脑DFS和BFS访问更少的节点。
根据以上的叙述,我们引入一种对搜索方法的分类:一种叫做Uniformed Search,也就是我们前面提到的无脑搜索BFS/DFS,而Dijkstra算法也属于这一类方法。这种Search的特点是无脑暴力,但有很强的通用性,假如对图没有任何先验知识,例如除了是否访问到之外完全不知道终点的其他信息的话,就只能使用这样的搜寻;另一种叫做Informed Search,又叫启发式(heuristic)搜索,即有先验知识的搜索,例如Best-First。其特点是对终点的位置可以有一些启发的信息,根据这些信息可以有倾向性的去筛选可能的路径。而A*算法,也就属于这一类方法。
| Uniform Search | Informed Search |
| BFS搜寻 | BestFirst搜寻 |
| DFS搜寻 | A*算法 |
| Dijkstra算法 |
在与Dijkstra算法的对比中理解A*算法
在大致了解所谓启发式搜寻之后,再来了解A*算法的寻路思路。在介绍之中,将会与Dijkstra算法紧密结合来进行讲解,毕竟这两个算法关系密切,并且在代码结构变量使用上上高度相似,可以说是亲如父子。假如没有充分了解Dijkstra算法,可以先参考博文“三角网格上的寻路算法Part.1—Dijkstra算法”。
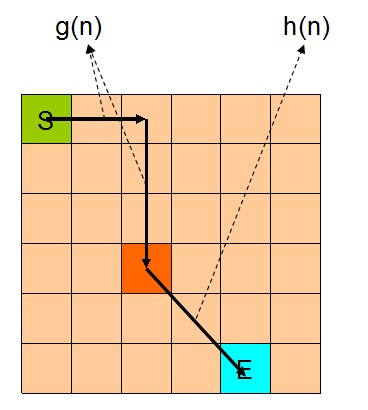
A*与Dijkstra算法最大的不同在于,它采用了启发式估价函数f(n)=g(n)+h(n)。这个g(n)有点类似于distance数组,代表当前节点到n的实际路径长度,而h(n)表示节点n到终点的估算路径长度。在算法实现的时候,f(n)和g(n)也是使用数组来表示,f数组中f[n]表示从S经过n到E的路径当前总估价,g数组中g[n]表示S到n的实际路径长度。而h(n)是和先验信息有关的函数。在我们上面举例的方格图中,h(n)的计算方式就是计算n到E的欧式距离,所以h(n)可以不采用数组,而是保留函数的形式,需要的时候直接计算:

我们知道Dijkstra算法中,distance数组是一个关键的变量。首先distance值的大小是从容器中取节点的标准,每次选择节点都是选择容器中distance值最小的节点。其次distance值还会在松弛操作中被更新为更小的值。也就是说Dijkstra算法是围绕着distance数组这个核心变量来运行的。而在A*算法中,核心变量则变为f数组,也就是说,A*算法中,我们的选择由distance最小变成了f最小。f数组成为容器的key,每次从容器中选择的是f值最小的节点。
A*算法设置有一个开启列表和关闭列表,节点状态可分为在关闭列表中、在开启列表中与尚未访问到,开启列表与Dijkstra算法中的容器Q类似,而关闭列表也与其相似,能使用bool数组来实现。对节点类别的划分也可以与Dijkstra算法中的A,B,C三类节点分法一一对上号。A*算法的逻辑结构与Dijkstra算法相似度很高,我们可以从下面伪代码的对比中看出:
Function_AStar(图Graph,起点S,终点E) |
Function_Dijkstra(图Graph,起点S,终点E) |
| A*算法伪代码 | 上篇博客中Dijkstra算法伪代码 |
涂颜色的代码就是A*和Dijkstra算法不同的地方,可以看出A*与Djikstra有着很多相同的点,例如对节点的分类,对容器Q的使用等。Dijkstra算法是层层向外扩展搜索,而A*算法虽然也是一步步向外搜索,但其扩展的方向更加有倾向性。而正是h函数赋予了A*算法这样的倾向性,一般来说h(n)会设计成在n越与E接近时越小,直到h(E)=0。在A*迭代的过程中,每个节点的f值会越来越与实际路径总长度接近,而g值则起到类似Dijkstra算法中distance的作用。
其他的讨论
关于A*算法正确性证明,博主也曾经想通过类似于Dijkstra算法那样简单的方式去证明,不过似乎是行不通的,经过一番搜索之后,发现一些有益的资源:
论文:Generalized Best-First Search Strategies and the Optimality of A*
尤其是形式化的证明可以从初始论文中找到,证明过程比较复杂,至于你看没看懂,反正我是没有看懂 ╮(╯▽╰)╭,呵呵~
关于A*算法伪代码中有一些比较权威的版本,例如维基百科的版本:
function A*(start,goal)
closedset := the empty set //已经被估算的节点集合
openset := set containing the initial node //将要被估算的节点集合
came_from := empty map
g_score[start] := 0 //g(n)
h_score[start] := heuristic_estimate_of_distance(start, goal) //h(n)
f_score[start] := h_score[start] //f(n)=h(n)+g(n),由于g(n)=0,所以……
while openset is not empty //当将被估算的节点存在时,执行
x := the node in openset having the lowest f_score[] value //取x为将被估算的节点中f(x)最小的
if x = goal //若x为终点,执行
return reconstruct_path(came_from,goal) //返回到x的最佳路径
remove x from openset //将x节点从将被估算的节点中删除
add x to closedset //将x节点插入已经被估算的节点
foreach y in neighbor_nodes(x) //对于节点x附近的任意节点y,执行
if y in closedset //若y已被估值,跳过
continue
tentative_g_score := g_score[x] + dist_between(x,y) //从起点到节点y的距离 if y not in openset //若y不是将被估算的节点
add y to openset //将y插入将被估算的节点中
tentative_is_better := true
elseif tentative_g_score < g_score[y] //如果y的估值小于y的实际距离
tentative_is_better := true //暂时判断为更好
else
tentative_is_better := false //否则判断为更差
if tentative_is_better = true //如果判断为更好
came_from[y] := x //将y设为x的子节点
g_score[y] := tentative_g_score
h_score[y] := heuristic_estimate_of_distance(y, goal)
f_score[y] := g_score[y] + h_score[y]
return failure
仔细分析不难得出这份伪代码的逻辑和本文的是一样的。不过需要指出,从网上搜索A*算法会有各种各样的版本,不过笔者发现所有的版本其逻辑可以归结为两类,其区别是对在关闭列表中节点的处理,例如下面的版本:
1:Put the start node, s, on a list called OPEN of unexpanded nodes
2:if |OPEN| = 0 then
3: Exit—no solution exists
4:Remove a node n from OPEN, at which f = g + h is minimum and place it on a list called CLOSED
5:if n is a goal node then
6: Exit with solution
7:Expand node n, generating all its successors with pointers back to n
8:for all successor n0of n do
9: Calculate f(n0)
10: if n0/ ∈ OPEN AND n0/ ∈ CLOSED then
11: Add n0to OPEN
12: Assign the newly computed f(n0) to node n0
13: else
14: If new f(n0) value is smaller than the previous value, then update with the new value (and predecessor)
15: If n0 was in CLOSED, move it back to OPEN
16:Go to (2)
总之就是部分版本对于close列表中的节点还会进行更新处理并重新加入开启列表,而另一部分版本是continue即什么都不做。咋一看这两者逻辑截然不同,那是不是有对于不对呢?其实这一区别主要和h函数有关。需要强调的是,A*算法的计算过程很大程度依赖于h函数的设计,一般来说h函数总会设计成h(n)<=Real(n),即n到E的实际距离。这样A*算法总会找到最短路径,这是存在证明的,论文里也提到过。假如h函数是一致单调的,例如对于两个节点n和m,若h(n)<h(m)能推出Real(n)<Real(m),则两个版本的伪代码是全部等价的。否则只有第二个版本是完备的,也就是需要重新加符合条件的closed节点入Open。Amitp在他的一篇关于A*的长篇文章中也指出这个h函数在consistant和admissible的时候,两份伪代码等价。通常我们将A*运用在实际模型的寻路上,例如三角网或者方格图,这些模型都是在欧式几何空间中很直观的模型,很多点和线都是具有实际几何意义的。在这类模型上,我们都知道两点之间线段最短的公理,因而采用欧式距离作为估计是很合理的。
有很多关于A*的很详细的细节讨论可以从amitp的博客上获取,尤其是一些小应用很好玩,有兴趣的人可以尝试一下,这里贴出其中一个flash,不能运行的话可以刷新一下,注意这个起点需要鼠标拖动与终点分离。
实现代码
A*算法的实现和上篇Dijkstra算法的实现是在同一个工程项目里,其测试用例都是用算法去求三角网格测地线。AbstractGraph,Mesh以及读取文件的类型可以参考上一篇博文。本文主要的关键是A*的逻辑。这里的类GeodeticCalculator_AStar是算法的执行主逻辑类,其中容器采用和Dijkstra算法一模一样的堆,这个堆唯一的不同就是key由从distance数组获取改为从f数组获取。
Dijkstra算法与A*算法通用的二叉堆容器实现的代码:
#ifndef ASTAROPENSET_H
#define ASTAROPENSET_H
#include <vector>
#include <math.h>
#include "DijkstraSet.h"
class AStarSet_Heap:DijkstraSet
{
private:
std::vector<int> heapArray;
std::vector<float> *f_key;
std::vector<int> indexInHeap;// stores the index to heapArray for each vertexIndex, -1 if not exist
public:
AStarSet_Heap(int maxsize,std::vector<float> *key)
{
this->f_key=key;
this->indexInHeap.resize(maxsize,-1);
}
~AStarSet_Heap(){f_key=0;}
void Add(int pindex)
{
this->heapArray.push_back(pindex);
indexInHeap[pindex]=heapArray.size()-1;
ShiftUp(heapArray.size()-1);
}
int ExtractMin()
{
if(heapArray.size()==0)
return -1;
int pindex=heapArray[0];
Swap(0,heapArray.size()-1);
heapArray.pop_back();
ShiftDown(0);
indexInHeap[pindex]=-1;
return pindex;
}
bool IsEmpty()
{
return heapArray.size()==0;
}
void DecreaseKey(int pindex)
{
ShiftUp(indexInHeap[pindex]);
}
private:
int GetParent(int index)
{
return (index-1)/2;
}
int GetLeftChild(int index)
{
return 2*index+1;
}
int GetRightChild(int index)
{
return 2*index+2;
}
bool IsLessThan(int index0,int index1)
{
return (*f_key)[heapArray[index0]]<(*f_key)[heapArray[index1]];
}
void ShiftUp(int i)
{
if (i == 0)
return;
else
{
int parent = GetParent(i);
if (IsLessThan(i,parent))
{
Swap(i, parent);
ShiftUp(parent);
}
}
}
void ShiftDown(int i)
{
if (i >= heapArray.size()) return;
int min = i;
int lc = GetLeftChild(i);
int rc = GetRightChild(i);
if (lc < heapArray.size() && IsLessThan(lc,min))
min = lc;
if (rc < heapArray.size() && IsLessThan(rc,min))
min = rc;
if (min != i)
{
Swap(i, min);
ShiftDown(min);
}
}
void Swap(int i, int j)
{
int temp = heapArray[i];
heapArray[i] = heapArray[j];
heapArray[j] = temp;
indexInHeap[heapArray[i]]=i;//record new position
indexInHeap[heapArray[j]]=j;//record new position
}
}; #endif
算法主体:
#ifndef GEODETICCALCULATOR_ASTAR_H
#define GEODETICCALCULATOR_ASTAR_H
#include <vector>
#include <math.h>
#include "Mesh.h"
#include "AStarOpenSet.h"
class GeodeticCalculator_AStar
{
private:
AbstractGraph& graph;
int startIndex;
int endIndex;
std::vector<float> gMap;//current s-distances for each node
std::vector<float> fMap;//current f-distances for each node
std::vector<int> previus;//previus vertex on each vertex's s-path AStarSet_Heap* set_Open;//current involved vertices, every vertex in set has a path to start point with distance<MAX_DIS but may not be s-distance.
std::vector<bool> flagMap_Close;//indicates if the s-path is found std::vector<bool> visited;//record visited vertices;
std::vector<int> resultPath;//result path from start to end
public:
GeodeticCalculator_AStar(AbstractGraph& g,int vstIndex,int vedIndex):graph(g),startIndex(vstIndex),endIndex(vedIndex)
{
set_Open=0;
}
~GeodeticCalculator_AStar()
{
if(set_Open!=0) delete set_Open;
}
//core functions
bool Execute()//main function execute AStar, return true if the end point is reached,false if path to end not exist
{
visited.resize(graph.GetNodeCount(),false);
gMap.resize(graph.GetNodeCount(),MAX_DIS);
fMap.resize(graph.GetNodeCount(),MAX_DIS);
previus.resize(graph.GetNodeCount(),-1);
flagMap_Close.resize(graph.GetNodeCount(),false);
this->set_Open=new AStarSet_Heap(graph.GetNodeCount(),&fMap);
set_Open->Add(startIndex);
gMap[startIndex]=0;
fMap[startIndex]=GetH(startIndex);
while(!set_Open->IsEmpty())
{
int pindex=set_Open->ExtractMin();// vertex with index "pindex" found its s-path
flagMap_Close[pindex]=true;//mark it
if(pindex==endIndex)
return true;
UpdateNeighborMinDistance(pindex);// update its neighbor's s-distance
}
return false;
}
private:
//core functions
float GetH(int p1)
{
return graph.GetEvaDistance(p1,endIndex);
}//calculate h[p1] when needed, not necessary to create an array to store
void UpdateNeighborMinDistance(int pindex)
{
std::vector<int>& neightbourlist=graph.GetNeighbourList(pindex);
for(size_t i=0;i<neightbourlist.size();i++ )
{
int neighbourindex=neightbourlist[i];
visited[neighbourindex]=true;//just for recording , not necessary
if (flagMap_Close[neighbourindex])//if Close Nodes,Type A
{
continue;
}
else
{
float gPassp = gMap[pindex] + graph.GetWeight(pindex, neighbourindex);
if (fMap[neighbourindex]==MAX_DIS)//if unvisited nodes ,Type C
{
//same operation as in Dijkstra except the assignment of fMap
gMap[neighbourindex] = gPassp;
fMap[neighbourindex]=gPassp + GetH(neighbourindex);
previus[neighbourindex] = pindex;
set_Open->Add(neighbourindex);
}
else
{
//same operation as in Dijkstra except the assignment of fMap
if (gPassp < gMap[neighbourindex])//Type B
{
gMap[neighbourindex] = gPassp;
fMap[neighbourindex]=gPassp + GetH(neighbourindex);
previus[neighbourindex] = pindex;
set_Open->DecreaseKey(neighbourindex);
}
}
}
}
}// for neighbors of pindex ,execute relaxation operation
public:
//extra functions
std::vector<int>& GetPath()
{
int cur=endIndex;
while(cur!=startIndex)
{
resultPath.push_back(cur);
cur=previus[cur];
}
resultPath.push_back(startIndex);
std::reverse(resultPath.begin(),resultPath.end());
return resultPath;
}// reconstruct path from prev[]
float PathLength()
{
return gMap[endIndex];
}//return the length of the path form result path
int VisitedNodeCount()
{
return (int)std::count(visited.begin(),visited.end(),true);
}//return the visited nodes count
std::vector<bool>& GetVisitedFlags()
{
return visited;
}//return the visited flags of the nodes
};
#endif
对比代码结构发现与Dijkstra算法简直不能再像,所以说先若是先了解了Dijkstra算法,那么只要做小的代码改动就能变成A*。
算法效果
因为我们始终强调A*改进了Djikstra算法的访问节点次数,所以我们可以使用两个模型的运行实际例子来说明。首先是计算测地线距离,上篇文章中我们就已经算出了Dijkstra的最短路径,其中访问过的节点都涂成绿色了,这次采用A*算法,可以看出A*算法比起Djikstra算法的确减少了节点的访问。
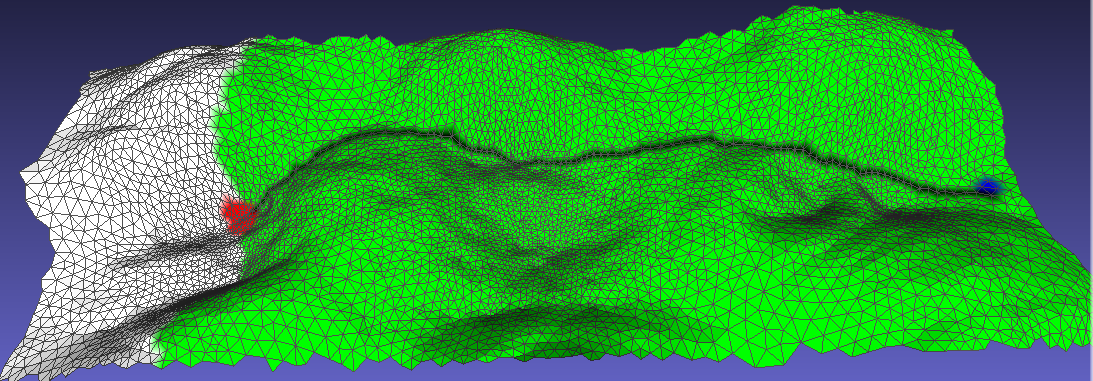 |
| Dijkstra算法寻找的测地线以及访问过的节点 |
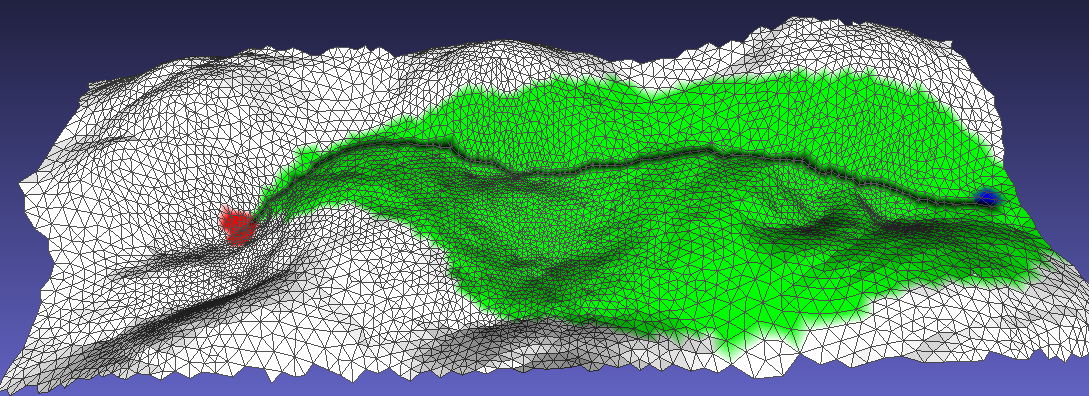 |
| A*算法寻找的测地线以及访问过的节点 |
我们再换一个方格图的模型如下,在这个模型上我们再做一些试验:
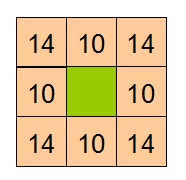 |
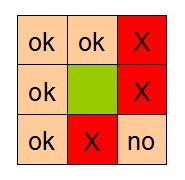 |
| 8个邻域其权值 | 邻接关系,ok表示邻接no表示不邻接X表示障碍物 |
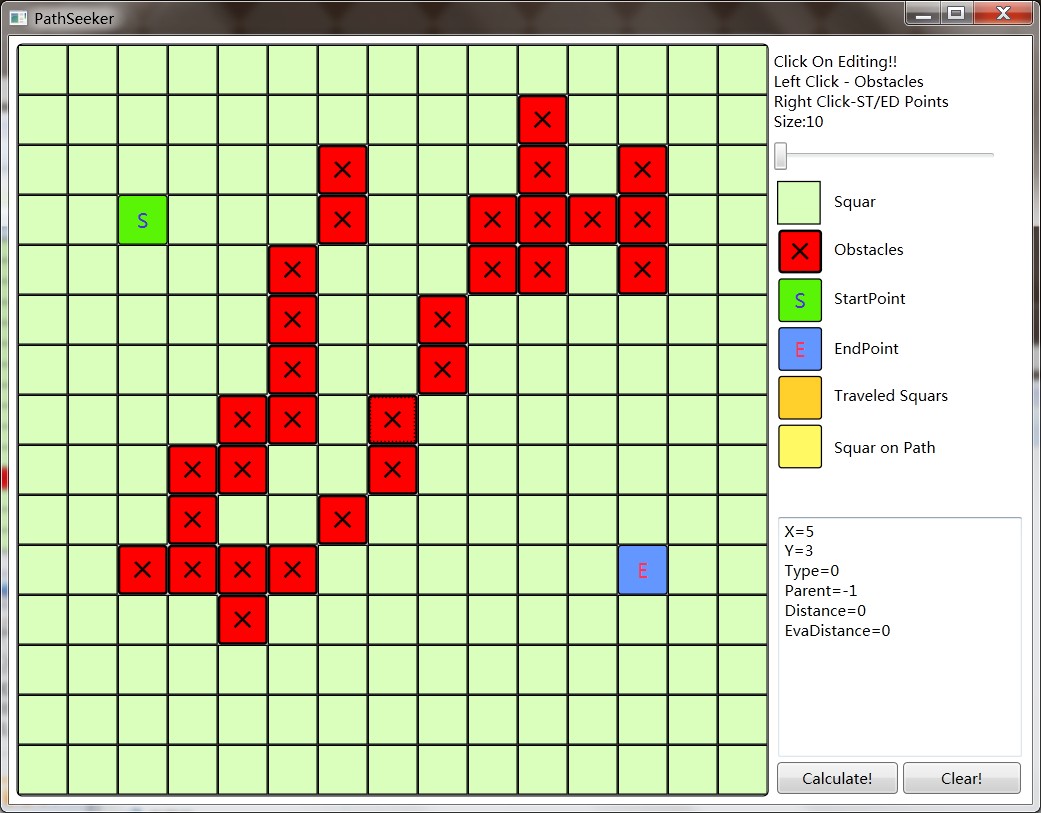
这个小软件PathSeeker是博主使用WPF写的一个算法可视化小工具,可以用鼠标设置方格图大小以及起点终点和障碍物,还能够选择BFS,Dijkstra算法,A*算法来计算路径和显示参数。
WPF小工具PathSeeker下载地址:https://files.cnblogs.com/chnhideyoshi/PathSeeker.rar
PathSeeker可以显示A*与Djikstra算法对每个访问到的节点所设置的distance值、g值、f值、h值等。方格寻路时能够寻找八邻域方格,八个领域方格的边权值不一样,而且不容许从角落穿出去。
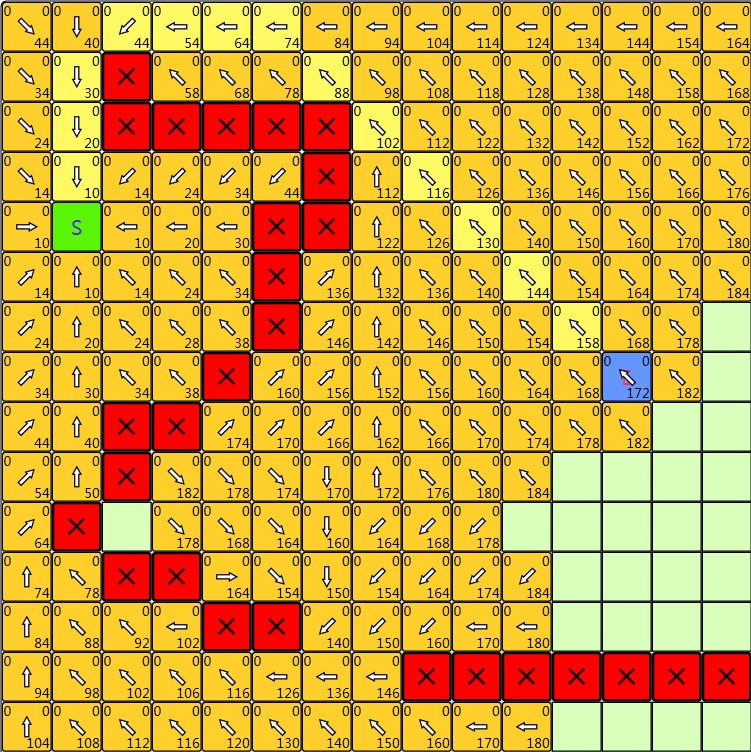 |
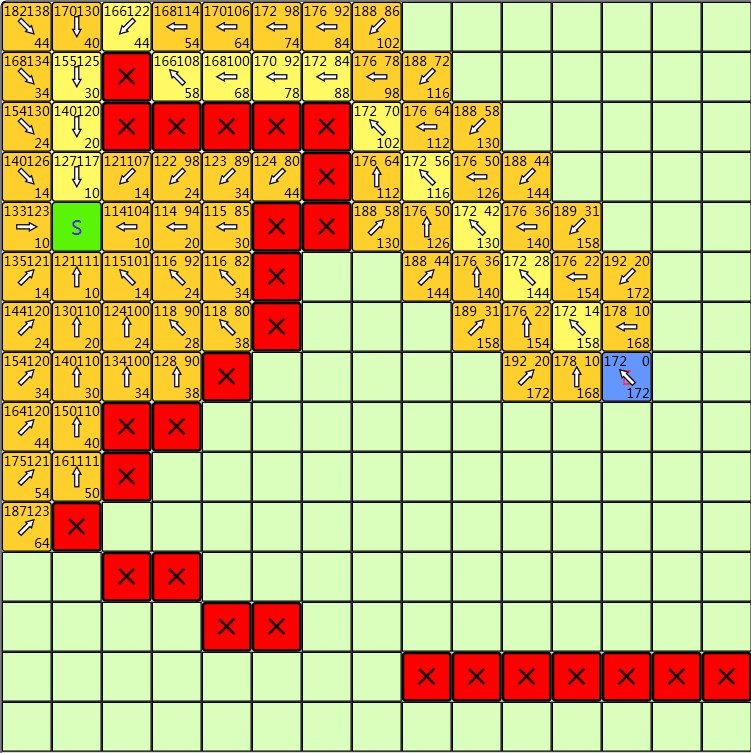 |
| Dijkstra算法寻路结果,方块右下角为distance值 | A*算法寻路结果,方块左上、右上和右下分别对应f值、h值和g值 |
从上述结果的确可以看出A*相对Dijkstra的改善,值得注意的是A*与Dijkstra都能找到最短,如果最短路径不止一条两个算法的最短路径不完全是一模一样的,但是路径长度会是一样的。
最后提供一下所有源代码的维护地址:
计算三角网近似测地线代码工程: https://github.com/chnhideyoshi/SeededGrow2d/tree/master/MeshGeodetic
PathSeeker代码工程:https://github.com/chnhideyoshi/SeededGrow2d/tree/master/PathSeeker
三角网格上的寻路算法Part.2—A*算法的更多相关文章
- 三角网格上的寻路算法Part.1—Dijkstra算法
背景 最近在研究中产生了这样的需求:在三角网格(Mesh)表示的地形图上给出两个点,求得这两个点之间的地面距离,这条距离又叫做"测地线距离(Geodesic)".计算三角网格模型表 ...
- 三角网格上的寻路算法Part.1—Dijkstra算法 等
http://www.cnblogs.com/chnhideyoshi/p/AStar.html
- unity A*寻路 (三)A*算法
这里我就不解释A*算法 如果你还不知道A*算法 网上有很多简单易懂的例子 我发几个我看过的链接 http://www.cnblogs.com/lipan/archive/2010/07/01/1769 ...
- 三角网格(Triangle Mesh)的理解
最简单的情形,多边形网格不过是一个多边形列表:三角网格就是全部由三角形组成的多边形网格.多边形和三角网格在图形学和建模中广泛使用,用来模拟复杂物体的表面,如建筑.车辆.人体,当然还有茶壶等.图14.1 ...
- bullet物理引擎与OpenGL结合 导入3D模型进行碰撞检测 以及画三角网格的坑
原文作者:aircraft 原文链接:https://www.cnblogs.com/DOMLX/p/11681069.html 一.初始化世界以及模型 /// 冲突配置包含内存的默认设置,冲突设置. ...
- 一步一步写算法(之prim算法 上)
原文:一步一步写算法(之prim算法 上) [ 声明:版权所有,欢迎转载,请勿用于商业用途. 联系信箱:feixiaoxing @163.com] 前面我们讨论了图的创建.添加.删除和保存等问题.今 ...
- 昇腾CANN论文上榜CVPR,全景图像生成算法交互性再增强!
摘要:近日,CVPR 2022放榜,基于CANN的AI论文<Interactive Image Synthesis with Panoptic Layout Generation>强势上榜 ...
- Python使用DDA算法和中点Bresenham算法画直线
title: "Python使用DDA算法和中点Bresenham算法画直线" date: 2018-06-11T19:28:02+08:00 tags: ["图形学&q ...
- 第三十节,目标检测算法之Fast R-CNN算法详解
Girshick, Ross. “Fast r-cnn.” Proceedings of the IEEE International Conference on Computer Vision. 2 ...
随机推荐
- vue 第三方图标库
"font-awesome": "^4.7.0", "dependencies": { "axios": "^ ...
- 【Java多线程】线程池-ThreadPoolExecutor
ThreadPoolExecutor提供了四个构造方法: 我们以最后一个构造方法(参数最多的那个),对其参数进行解释: public ThreadPoolExecutor(int corePoolSi ...
- Leetcode 78题-子集
LeetCode 78 网上已经又很多解这题的博客了,在这只是我自己的解题思路和自己的代码: 先贴上原题: 我的思路: 我做题的喜欢在本子或别处做写几个示例,以此来总结规律:下图就是我从空数组到数组长 ...
- 【力扣】649. Dota2 参议院
Dota2 的世界里有两个阵营:Radiant(天辉)和 Dire(夜魇) Dota2 参议院由来自两派的参议员组成.现在参议院希望对一个 Dota2 游戏里的改变作出决定.他们以一个基于轮为过程的投 ...
- C# 温故知新 第一篇 C# 与 .net 的关系
C# 与.net 的关系很多初学者或者未从事过.net 研发的编程人员 都不是很清楚,认为 C# 与.net 是一回事. 我们经常说java开发,C++开发,指的是两种开发语言:但是 经常看到 .ne ...
- 从Rest到Graphql
一.引言 ok,如图所示,我在去年曾经写过一篇文章<闲侃前后端分离的必要性>.嗯,我知道肯定很多人没看过.所以我做一个总结,其实啰里八嗦了一篇文章,就是想说一下现在的大型互联网项目一般是如 ...
- 复杂SQL案例:用户退款信息查询
供参考: select t3.course_id 课程id, t3.user_id 用户ID, u.user_full_name 姓名, -- u.phone, concat(u.company,' ...
- IDEA中springboot项目添加yml格式配置文件
1.先创建application.properties 文件,在resources文件夹,右键 new -> Resource Bundle 如下图所示,填写名称 2.生成如下图所示文件 3. ...
- 【LeetCode】面试题 01.07. 旋转矩阵
作者: 负雪明烛 id: fuxuemingzhu 个人博客:http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 两次翻转 日期 题目地址:https://leetco ...
- 【九度OJ】题目1173:查找 解题报告
[九度OJ]题目1173:查找 解题报告 标签(空格分隔): 九度OJ [LeetCode] http://ac.jobdu.com/problem.php?pid=1173 题目描述: 输入数组长度 ...