卷积神经网络用于视觉识别Convolutional Neural Networks for Visual Recognition
Table of Contents:
- Architecture Overview
- ConvNet Layers
- ConvNet Architectures
- Layer Patterns
- Layer Sizing Patterns
- Case Studies (LeNet / AlexNet / ZFNet / GoogLeNet / VGGNet)
- Computational Considerations
- Additional References
Convolutional Neural Networks (CNNs / ConvNets)
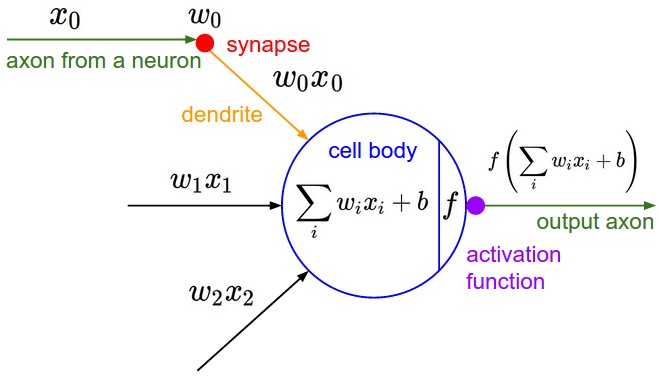
Convolutional Neural Networks are very similar to ordinary Neural Networks from the previous chapter: They are made up of neurons that have learnable weights and biases. Each neuron receives some inputs, performs a dot product and optionally follows it with a non-linearity. The whole network still express a single differentiable score function: From the raw image pixels on one end to class scores at the other. And they still have a loss function (e.g. SVM/Softmax) on the last (fully-connected) layer and all the tips/tricks we developed for learning regular Neural Networks still apply.
So what does change? ConvNet architectures make the explicit assumption that the inputs are images, which allows us to encode certain properties into the architecture. These then make the forward function more efficient to implement and vastly reduces the amount of parameters in the network.
Architecture Overview
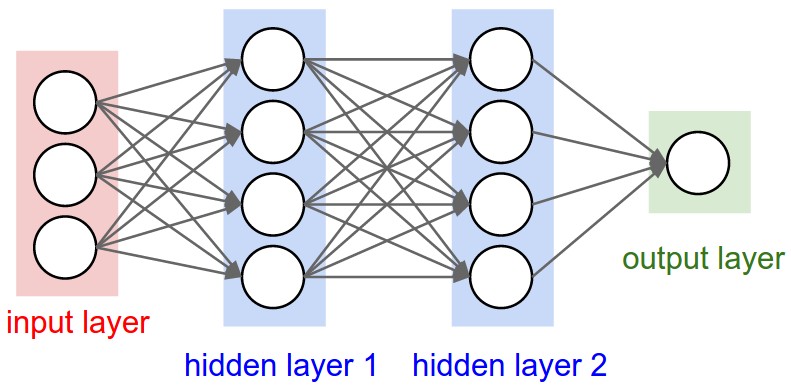
Recall: Regular Neural Nets. As we saw in the previous chapter, Neural Networks receive an input (a single vector), and transform it through a series of hidden layers. Each hidden layer is made up of a set of neurons, where each neuron is fully connected to all neurons in the previous layer, and where neurons in a single layer function completely independently and do not share any connections. The last fully-connected layer is called the "output layer" and in classification settings it represents the class scores.
Regular Neural Nets don't scale well to full images. In CIFAR-10, images are only of size 32x32x3 (32 wide, 32 high, 3 color channels), so a single fully-connected neuron in a first hidden layer of a regular Neural Network would have 32*32*3 = 3072 weights. This amount still seems manageable, but clearly this fully-connected structure does not scale to larger images. For example, an image of more respectible size, e.g. 200x200x3, would lead to neurons that have 200*200*3 = 120,000 weights. Moreover, we would almost certainly want to have several such neurons, so the parameters would add up quickly! Clearly, this full connectivity is wasteful and the huge number of parameters would quickly lead to overfitting.
3D volumes of neurons. Convolutional Neural Networks take advantage of the fact that the input consists of images and they constrain the architecture in a more sensible way. In particular, unlike a regular Neural Network, the layers of a ConvNet have neurons arranged in 3 dimensions: width, height, depth. (Note that the word depth here refers to the third dimension of an activation volume, not to the depth of a full Neural Network, which can refer to the total number of layers in a network.) For example, the input images in CIFAR-10 are an input volume of activations, and the volume has dimensions 32x32x3 (width, height, depth respectively). As we will soon see, the neurons in a layer will only be connected to a small region of the layer before it, instead of all of the neurons in a fully-connected manner. Moreover, the final output layer would for CIFAR-10 have dimensions 1x1x10, because by the end of the ConvNet architecture we will reduce the full image into a single vector of class scores, arranged along the depth dimension. Here is a visualization:
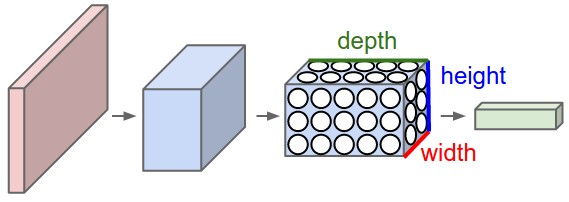
A ConvNet is made up of Layers. Every Layer has a simple API: It transforms an input 3D volume to an output 3D volume with some differentiable function that may or may not have parameters.
Layers used to build ConvNets
As we described above, every layer of a ConvNet transforms one volume of activations to another through a differentiable function. We use three main types of layers to build ConvNet architectures: Convolutional Layer,Pooling Layer, and Fully-Connected Layer (exactly as seen in regular Neural Networks). We will stack these layers to form a full ConvNet architecture.
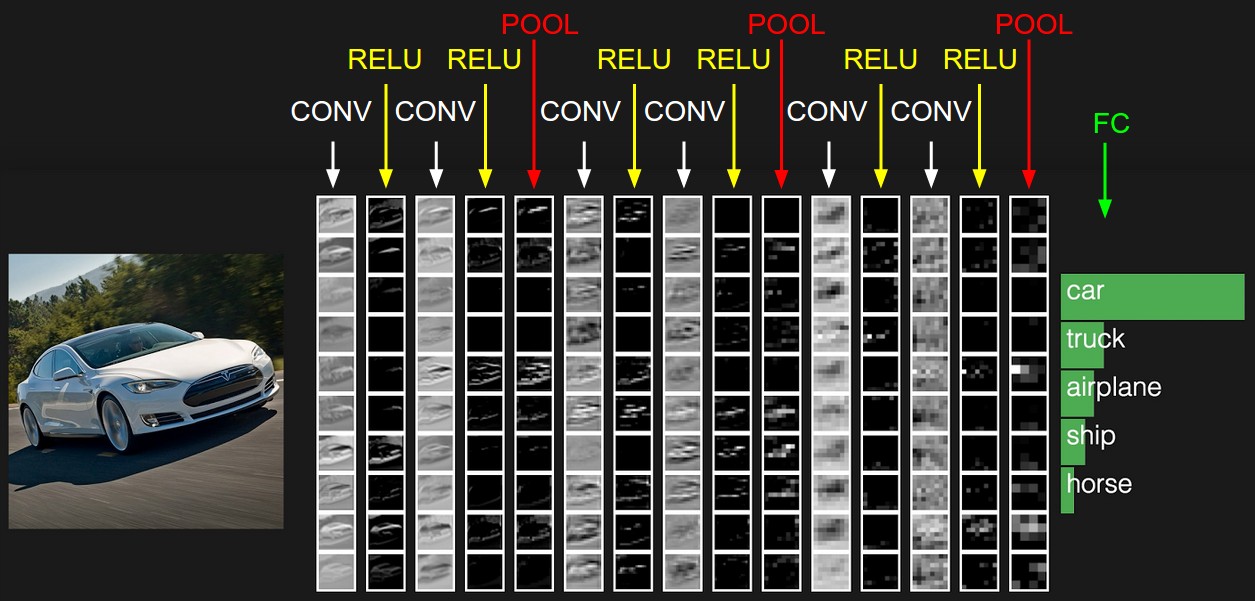
Example Architecture: Overview. We will go into more details below, but a simple ConvNet for CIFAR-10 classification could have the architecture [INPUT - CONV - RELU - POOL - FC]. In more detail:
- INPUT [32x32x3] will hold the raw pixel values of the image, in this case an image of width 32, height 32, and with three color channels R,G,B.
- CONV layer will compute the output of neurons that are connected to local regions in the input, each computing a dot product between their weights and the region they are connected to in the input volume. This may result in volume such as [32x32x12].
- RELU layer will apply an elementwise activation function, such as the max(0,x)max(0,x) thresholding at zero. This leaves the size of the volume unchanged ([32x32x12]).
- POOL layer will perform a downsampling operation along the spatial dimensions (width, height), resulting in volume such as [16x16x12].
- FC (i.e. fully-connected) layer will compute the class scores, resulting in volume of size [1x1x10], where each of the 10 numbers correspond to a class score, such as among the 10 categories of CIFAR-10. As with ordinary Neural Networks and as the name implies, each neuron in this layer will be connected to all the numbers in the previous volume.
In this way, ConvNets transform the original image layer by layer from the original pixel values to the final class scores. Note that some layers contain parameters and other don't. In particular, the CONV/FC layers perform transformations that are a function of not only the activations in the input volume, but also of the parameters (the weights and biases of the neurons). On the other hand, the RELU/POOL layers will implement a fixed function. The parameters in the CONV/FC layers will be trained with gradient descent so that the class scores that the ConvNet computes are consistent with the labels in the training set for each image.
In summary:
- A ConvNet architecture is a list of Layers that transform the image volume into an output volume (e.g. holding the class scores)
- There are a few distinct types of Layers (e.g. CONV/FC/RELU/POOL are by far the most popular)
- Each Layer accepts an input 3D volume and transforms it to an output 3D volume through a differentiable function
- Each Layer may or may not have parameters (e.g. CONV/FC do, RELU/POOL don't)
- Each Layer may or may not have additional hyperparameters (e.g. CONV/FC/POOL do, RELU doesn't)
We now describe the individual layers and the details of their hyperparameters and their connectivities.
Convolutional Layer
The Conv layer is the core building block of a Convolutional Network, and its output volume can be interpreted as holding neurons arranged in a 3D volume. We now discuss the details of the neuron connectivities, their arrangement in space, and their parameter sharing scheme.
Overview and Intuition. The CONV layer's parameters consist of a set of learnable filters. Every filter is small spatially (along width and height), but extends through the full depth of the input volume. During the forward pass, we slide (more precisely, convolve) each filter across the width and height of the input volume, producing a 2-dimensional activation map of that filter. As we slide the filter, across the input, we are computing the dot product between the entries of the filter and the input. Intuitively, the network will learn filters that activate when they see some specific type of feature at some spatial position in the input. Stacking these activation maps for all filters along the depth dimension forms the full output volume. Every entry in the output volume can thus also be interpreted as an output of a neuron that looks at only a small region in the input and shares parameters with neurons in the same activation map (since these numbers all result from applying the same filter). We now dive into the details of this process.
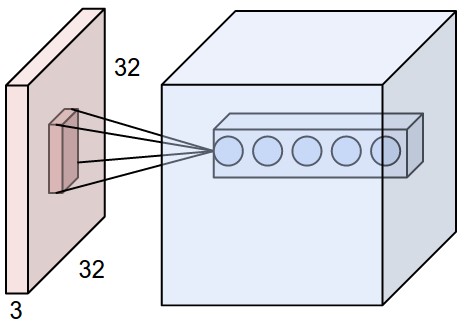
Local Connectivity. When dealing with high-dimensional inputs such as images, as we saw above it is impractical to connect neurons to all neurons in the previous volume. Instead, we will connect each neuron to only a local region of the input volume. The spatial extent of this connectivity is a hyperparameter called the receptive field of the neuron. The extent of the connectivity along the depth axis is always equal to the depth of the input volume. It is important to note this asymmetry in how we treat the spatial dimensions (width and height) and the depth dimension: The connections are local in space (along width and height), but always full along the entire depth of the input volume.
Example 1. For example, suppose that the input volume has size [32x32x3], (e.g. an RGB CIFAR-10 image). If the receptive field is of size 5x5, then each neuron in the Conv Layer will have weights to a [5x5x3] region in the input volume, for a total of 5*5*3 = 75 weights. Notice that the extent of the connectivity along the depth axis must be 3, since this is the depth of the input volume.
Example 2. Suppose an input volume had size [16x16x20]. Then using an example receptive field size of 3x3, every neuron in the Conv Layer would now have a total of 3*3*20 = 180 connections to the input volume. Notice that, again, the connectivity is local in space (e.g. 3x3), but full along the input depth (20).
Spatial arrangement. We have explained the connectivity of each neuron in the Conv Layer to the input volume, but we haven't yet discussed how many neurons there are in the output volume or how they are arranged. Three hyperparameters control the size of the output volume: the depth, stride and zero-padding. We discuss these next:
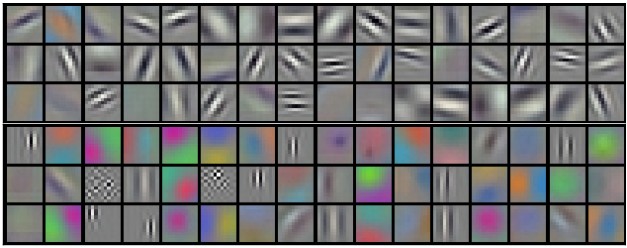
- First, the depth of the output volume is a hyperparameter that we can pick; It controls the number of neurons in the Conv layer that connect to the same region of the input volume. This is analogous to a regular Neural Network, where we had multiple neurons in a hidden layer all looking at the exact same input. As we will see, all of these neurons will learn to activate for different features in the input. For example, if the first Convolutional Layer takes as input the raw image, then different neurons along the depth dimension may activate in presence of various oriented edged, or blobs of color. We will refer to a set of neurons that are all looking at the same region of the input as a depth column.
- Second, we must specify the stride with which we allocate depth columns around the spatial dimensions (width and height). When the stride is 1, then we will allocate a new depth column of neurons to spatial positions only 1 spatial unit apart. This will lead to heavily overlapping receptive fields between the columns, and also to large output volumes. Conversely, if we use higher strides then the receptive fields will overlap less and the resulting output volume will have smaller dimensions spatially.
- As we will soon see, sometimes it will be convenient to pad the input with zeros spatially on the border of the input volume. The size of this zero-padding is a hyperparameter. The nice feature of zero padding is that it will allow us to control the spatial size of the output volumes. In particular, we will sometimes want to exactly preserve the spatial size of the input volume.
We can compute the spatial size of the output volume as a function of the input volume size (WW), the receptive field size of the Conv Layer neurons (FF), the stride with which they are applied (SS), and the amount of zero padding used (PP) on the border. You can convince yourself that the correct formula for calculating how many neurons "fit" is given by (W−F+2P)/S+1(W−F+2P)/S+1. If this number is not an integer, then the strides are set incorrectly and the neurons cannot be tiled so that they "fit" across the input volume neatly, in a symmetric way. An example might help to get intuitions for this formula:

The neuron weights are in this example [1,0,-1] (shown on very right), and its bias is zero. These weights are shared across all yellow neurons (see parameter sharing below).
Use of zero-padding. In the example above on left, note that the input dimension was 5 and the output dimension was equal: also 5. This worked out so because our receptive fields were 3 and we used zero padding of 1. If there was no zero-padding used, then the output volume would have had spatial dimension of only 3, because that it is how many neurons would have "fit" across the original input. In general, setting zero padding to be P=(F−1)/2P=(F−1)/2when the stride is S=1S=1 ensures that the input volume and output volume will have the same size spatially. It is very common to use zero-padding in this way and we will discuss the full reasons when we talk more about ConvNet architectures.
Constraints on strides. Note that the spatial arrangement hyperparameters have mutual constraints. For example, when the input has size W=10W=10, no zero-padding is used P=0P=0, and the filter size is F=3F=3, then it would be impossible to use stride S=2S=2, since (W−F+2P)/S+1=(10−3+0)/2+1=4.5(W−F+2P)/S+1=(10−3+0)/2+1=4.5, i.e. not an integer, indicating that the neurons don't "fit" neatly and symmetrically across the input. Therefore, this setting of the hyperparameters is considered to be invalid, and a ConvNet library would likely throw an exception. As we will see in the ConvNet architectures section, sizing the ConvNets appropriately so that all the dimensions "work out" can be a real headache, which the use of zero-padding and some design guidelines will significantly alleviate.
Real-world example. The Krizhevsky et al. architecture that won the ImageNet challenge in 2012 accepted images of size [227x227x3]. On the first Convolutional Layer, it used neurons with receptive field size F=11F=11, stride S=4S=4and no zero padding P=0P=0. Since (227 - 11)/4 + 1 = 55, and since the Conv layer had a depth of K=96K=96, the Conv layer output volume had size [55x55x96]. Each of the 55*55*96 neurons in this volume was connected to a region of size [11x11x3] in the input volume. Moreover, all 96 neurons in each depth column are connected to the same [11x11x3] region of the input, but of course with different weights.
Parameter Sharing. Parameter sharing scheme is used in Convolutional Layers to control the number of parameters. Using the real-world example above, we see that there are 55*55*96 = 290,400 neurons in the first Conv Layer, and each has 11*11*3 = 363 weights and 1 bias. Together, this adds up to 290400 * 364 = 105,705,600 parameters on the first layer of the ConvNet alone. Clearly, this number is very high.
It turns out that we can dramatically reduce the number of parameters by making one reasonable assumption: That if one patch feature is useful to compute at some spatial position (x,y), then it should also be useful to compute at a different position (x2,y2). In other words, denoting a single 2-dimensional slice of depth as a depth slice (e.g. a volume of size [55x55x96] has 96 depth slices, each of size [55x55]), we are going to constrain the neurons in each depth slice to use the same weights and bias. With this parameter sharing scheme, the first Conv Layer in our example would now have only 96 unique set of weights (one for each depth slice), for a total of 96*11*11*3 = 34,848 unique weights, or 34,944 parameters (+96 biases). Alternatively, all 55*55 neurons in each depth slice will now be using the same parameters. In practice during backpropagation, every neuron in the volume will compute the gradient for its weights, but these gradients will be added up across each depth slice and only update a single set of weights per slice.
Notice that if all neurons in a single depth slice are using the same weight vector, then the forward pass of the CONV layer can in each depth slice be computed as a convolution of the neuron's weights with the input volume (Hence the name: Convolutional Layer). Therefore, it is common to refer to the sets of weights as a filter (or a kernel), which is convolved with the input. The result of this convolution is an activation map (e.g. of size [55x55]), and the set of activation maps for each different filter are stacked together along the depth dimension to produce the output volume (e.g. [55x55x96]).
Note that sometimes the parameter sharing assumption may not make sense. This is especially the case when the input images to a ConvNet have some specific centered structure, where we should expect, for example, that completely different features should be learned on one side of the image than another. One practical example is when the input are faces that have been centered in the image. You might expect that different eye-specific or hair-specific features could (and should) be learned in different spatial locations. In that case it is common to relax the parameter sharing scheme, and instead simply call the layer a Locally-Connected Layer.
Numpy examples. To make the discussion above more concrete, lets express the same ideas but in code and with a specific example. Suppose that the input volume is a numpy array X. Then:
- A depth column at position
(x,y)would be the activationsX[x,y,:]. - A depth slice, or equivalently an activation map at depth
dwould be the activationsX[:,:,d].
Conv Layer Example. Suppose that the input volume X has shape X.shape: (11,11,4). Suppose further that we use no zero padding (P=0P=0), that the filter size is F=5F=5, and that the stride is S=2S=2. The output volume would therefore have spatial size (11-5)/2+1 = 4, giving a volume with width and height of 4. The activation map in the output volume (call it V), would then look as follows (only some of the elements are computed in this example):
V[0,0,0] = np.sum(X[:5,:5,:] * W0) + b0V[1,0,0] = np.sum(X[2:7,:5,:] * W0) + b0V[2,0,0] = np.sum(X[4:9,:5,:] * W0) + b0V[3,0,0] = np.sum(X[6:11,:5,:] * W0) + b0
Remember that in numpy, the operation * above denotes elementwise multiplication between the arrays. Notice also that the weight vector W0 is the weight vector of that neuron and b0 is the bias. Here, W0 is assumed to be of shape W0.shape: (5,5,4), since the filter size is 5 and the depth of the input volume is 4. Notice that at each point, we are computing the dot product as seen before in ordinary neural networks. Also, we see that we are using the same weight and bias (due to parameter sharing), and where the dimensions along the width are increasing in steps of 2 (i.e. the stride). To construct a second activation map in the output volume, we would have:
V[0,0,1] = np.sum(X[:5,:5,:] * W1) + b1V[1,0,1] = np.sum(X[2:7,:5,:] * W1) + b1V[2,0,1] = np.sum(X[4:9,:5,:] * W1) + b1V[3,0,1] = np.sum(X[6:11,:5,:] * W1) + b1V[0,1,1] = np.sum(X[:5,2:7,:] * W1) + b1(example of going along y)V[2,3,1] = np.sum(X[4:9,6:11,:] * W1) + b1(or along both)
where we see that we are indexing into the second depth dimension in V (at index 1) because we are computing the second activation map, and that a different set of parameters (W1) is now used. In the example above, we are for brevity leaving out some of the other operatations the Conv Layer would perform to fill the other parts of the output array V. Additionally, recall that these activation maps are often followed elementwise through an activation function such as ReLU, but this is not shown here.
Summary. To summarize, the Conv Layer:
- Accepts a volume of size W1×H1×D1W1×H1×D1
- Requires four hyperparameters:
- Number of filters KK,
- their spatial extent FF,
- the stride SS,
- the amount of zero padding PP.
- Produces a volume of size W2×H2×D2W2×H2×D2 where:
- W2=(W1−F+2P)/S+1W2=(W1−F+2P)/S+1
- H2=(H1−F+2P)/S+1H2=(H1−F+2P)/S+1 (i.e. width and height are computed equally by symmetry)
- D2=KD2=K
- With parameter sharing, it introduces F⋅F⋅D1F⋅F⋅D1 weights per filter, for a total of (F⋅F⋅D1)⋅K(F⋅F⋅D1)⋅K weights and KK biases.
- In the output volume, the dd-th depth slice (of size W2×H2W2×H2) is the result of performing a valid convolution of the dd-th filter over the input volume with a stride of SS, and then offset by dd-th bias.
A common setting of the hyperparameters is F=3,S=1,P=1F=3,S=1,P=1. However, there are common conventions and rules of thumb that motivate these hyperparameters. See the ConvNet architectures section below.
Convolution Demo. Below is a running demo of a CONV layer. Since 3D volumes are hard to visualize, all the volumes (the input volume (in blue), the weight volumes (in red), the output volume (in green)) are visualized with each depth slice stacked in rows. The input volume is of size W1=5,H1=5,D1=3W1=5,H1=5,D1=3, and the CONV layer parameters are K=2,F=3,S=2,P=1K=2,F=3,S=2,P=1. That is, we have two filters of size 3×33×3, and they are applied with a stride of 2. Therefore, the output volume size has spatial size (5 - 3 + 2)/2 + 1 = 3. Moreover, notice that a padding of P=1P=1 is applied to the input volume, making the outer border of the input volume zero. The visualization below iterates over the output activations (green), and shows that each element is computed by elementwise multiplying the highlighted input (blue) with the filter (red), summing it up, and then offsetting the result by the bias.
Implementation as Matrix Multiplication. Note that the convolution operation essentially performs dot products between the filters and local regions of the input. A common implementation pattern of the CONV layer is to take advantage of this fact and formulate the forward pass of a convolutional layer as one big matrix multiply as follows:
- The local regions in the input image are stretched out into columns in an operation commonly called im2col. For example, if the input is [227x227x3] and it is to be convolved with 11x11x3 filters at stride 4, then we would take [11x11x3] blocks of pixels in the input and stretch each block into a column vector of size 11*11*3 = 363. Iterating this process in the input at stride of 4 gives (227-11)/4+1 = 55 locations along both width and height, leading to an output matrix
X_colof im2col of size [363 x 3025], where every column is a stretched out receptive field and there are 55*55 = 3025 of them in total. Note that since the receptive fields overlap, every number in the input volume may be duplicated in multiple distinct columns. - The weights of the CONV layer are similarly stretched out into rows. For example, if there are 96 filters of size [11x11x3] this would give a matrix
W_rowof size [96 x 363]. - The result of a convolution is now equivalent to performing one large matrix multiply
np.dot(W_row, X_col), which evaluates the dot product between every filter and every receptive field location. In our example, the output of this operation would be [96 x 3025], giving the output of the dot product of each filter at each location. - The result must finally be reshaped back to its proper output dimension [55x55x96].
This approach has the downside that it can use a lot of memory, since some values in the input volume are replicated multiple times in X_col. However, the benefit is that there are many very efficient implementations of Matrix Multiplication that we can take advantage of (for example, in the commonly used BLAS API). Morever, the same im2col idea can be reused to perform the pooling operation, which we discuss next.
Backpropagation. The backward pass for a convolution operation (for both the data and the weights) is also a convolution (but with spatially-flipped filters). This is easy to derive in the 1-dimensional case with a toy example (not expanded on for now).
Pooling Layer
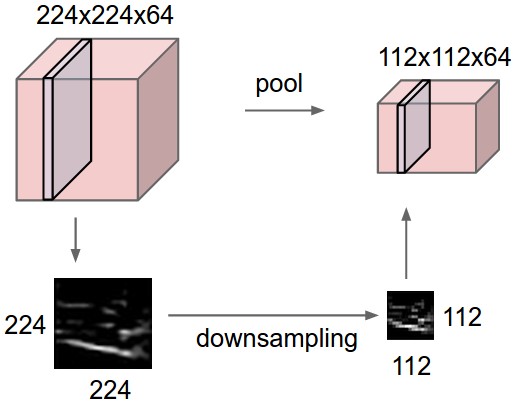
It is common to periodically insert a Pooling layer in-between successive Conv layers in a ConvNet architecture. Its function is to progressively reduce the spatial size of the representation to reduce the amount of parameters and computation in the network, and hence to also control overfitting. The Pooling Layer operates independently on every depth slice of the input and resizes it spatially, using the MAX operation. The most common form is a pooling layer with filters of size 2x2 applied with a stride of 2 downsamples every depth slice in the input by 2 along both width and height, discarding 75% of the activations. Every MAX operation would in this case be taking a max over 4 numbers (little 2x2 region in some depth slice). The depth dimension remains unchanged. More generally, the pooling layer:
- Accepts a volume of size W1×H1×D1W1×H1×D1
- Requires three hyperparameters:
- their spatial extent FF,
- the stride SS,
- Produces a volume of size W2×H2×D2W2×H2×D2 where:
- W2=(W1−F)/S+1W2=(W1−F)/S+1
- H2=(H1−F)/S+1H2=(H1−F)/S+1
- D2=D1D2=D1
- Introduces zero parameters since it computes a fixed function of the input
- Note that it is not common to use zero-padding for Pooling layers
It is worth noting that there are only two commonly seen variations of the max pooling layer found in practice: A pooling layer with F=3,S=2F=3,S=2 (also called overlapping pooling), and more commonly F=2,S=2F=2,S=2. Pooling sizes with larger receptive fields are too destructive.
General pooling. In addition to max pooling, the pooling units can also perform other functions, such as average pooling or even L2-norm pooling. Average pooling was often used historically but has recently fallen out of favor compared to the max pooling operation, which has been shown to work better in practice.

Backpropagation. Recall from the backpropagation chapter that the backward pass for a max(x, y) operation has a simple interpretation as only routing the gradient to the input that had the highest value in the forward pass. Hence, during the forward pass of a pooling layer it is common to keep track of the index of the max activation (sometimes also called the switches) so that gradient routing is efficient during backpropagation.
Recent developments.
- Fractional Max-Pooling suggests a method for performing the pooling operation with filters smaller than 2x2. This is done by randomly generating pooling regions with a combination of 1x1, 1x2, 2x1 or 2x2 filters to tile the input activation map. The grids are generated randomly on each forward pass, and at test time the predictions can be averaged across several grids.
- Striving for Simplicity: The All Convolutional Net proposes to discard the pooling layer in favor of architecture that only consists of repeated CONV layers. To reduce the size of the representation they suggest using larger stride in CONV layer once in a while.
Due to the aggressive reduction in the size of the representation (which is helpful only for smaller datasets to control overfitting), the trend in the literature is towards discarding the pooling layer in modern ConvNets.
Normalization Layer
Many types of normalization layers have been proposed for use in ConvNet architectures, sometimes with the intentions of implementing inhibition schemes observed in the biological brain. However, these layers have recently fallen out of favor because in practice their contribution has been shown to be minimal, if any. For various types of normalizations, see the discussion in Alex Krizhevsky's cuda-convnet library API.
Fully-connected layer
Neurons in a fully connected layer have full connections to all activations in the previous layer, as seen in regular Neural Networks. Their activations can hence be computed with a matrix multiplication followed by a bias offset. See the Neural Network section of the notes for more information.
Converting FC layers to CONV layers
It is worth noting that the only difference between FC and CONV layers is that the neurons in the CONV layer are connected only to a local region in the input, and that many of the neurons in a CONV volume share parameters. However, the neurons in both layers still compute dot products, so their functional form is identical. Therefore, it turns out that it's possible to convert between FC and CONV layers:
- For any CONV layer there is an FC layer that implements the same forward function. The weight matrix would be a large matrix that is mostly zero except for at certian blocks (due to local connectivity) where the weights in many of the blocks are equal (due to parameter sharing).
- Conversely, any FC layer can be converted to a CONV layer. For example, an FC layer with K=4096K=4096 that is looking at some input volume of size 7×7×5127×7×512 can be equivalently expressed as a CONV layer with F=7,P=0,S=1,K=4096F=7,P=0,S=1,K=4096. In other words, we are setting the filter size to be exactly the size of the input volume, and hence the output will simply be 1×1×40961×1×4096 since only a single depth column "fits" across the input volume, giving identical result as the initial FC layer.
FC->CONV conversion. Of these two conversions, the ability to convert an FC layer to a CONV layer is particularly useful in practice. Consider a ConvNet architecture that takes a 224x224x3 image, and then uses a series of CONV layers and POOL layers to reduce the image to an activations volume of size 7x7x512 (in an AlexNet architecture that we'll see later, this is done by use of 5 pooling layers that downsample the input spatially by a factor of two each time, making the final spatial size 224/2/2/2/2/2 = 7). From there, an AlexNet uses two FC layers of size 4096 and finally the last FC layers with 1000 neurons that compute the class scores. We can convert each of these three FC layers to CONV layers as described above:
- Replace the first FC layer that looks at [7x7x512] volume with a CONV layer that uses filter size F=7F=7, giving output volume [1x1x4096].
- Replace the second FC layer with a CONV layer that uses filter size F=1F=1, giving output volume [1x1x4096]
- Replace the last FC layer similarly, with F=1F=1, giving final output [1x1x1000]
Each of these conversions could in practice involve manipulating (e.g. reshaping) the weight matrix WW in each FC layer into CONV layer filters. It turns out that this conversion allows us to "slide" the original ConvNet very efficiently across many spatial positions in a larger image, in a single forward pass.
For example, if 224x224 image gives a volume of size [7x7x512] - i.e. a reduction by 32, then forwarding an image of size 384x384 through the converted architecture would give the equivalent volume in size [12x12x512], since 384/32 = 12. Following through with the next 3 CONV layers that we just converted from FC layers would now give the final volume of size [6x6x1000], since (12 - 7)/1 + 1 = 6. Note that instead of a single vector of class scores of size [1x1x1000], we're now getting and entire 6x6 array of class scores across the 384x384 image.
Evaluating the original ConvNet (with FC layers) independently across 224x224 crops of the 384x384 image in strides of 32 pixels gives an identical result to forwarding the converted ConvNet one time.
Naturally, forwarding the converted ConvNet a single time is much more efficient than iterating the original ConvNet over all those 36 locations, since the 36 evaluations share computation. This trick is often used in practice to get better performance, where for example, it is common to resize an image to make it bigger, use a converted ConvNet to evaluate the class scores at many spatial positions and then average the class scores.
Lastly, what if we wanted to efficiently apply the original ConvNet over the image but at a stride smaller than 32 pixels? We could achieve this with multiple forward passes. For example, note that if we wanted to use a stride of 16 pixels we could do so by combining the volumes received by forwarding the converted ConvNet twice: First over the original image and second over the image but with the image shifted spatially by 16 pixels along both width and height.
- An IPython Notebook on Net Surgery shows how to perform the conversion in practice, in code (using Caffe)
ConvNet Architectures
We have seen that Convolutional Networks are commonly made up of only three layer types: CONV, POOL (we assume Max pool unless stated otherwise) and FC (short for fully-connected). We will also explicitly write the RELU activation function as a layer, which applies elementwise non-linearity. In this section we discuss how these are commonly stacked together to form entire ConvNets.
Layer Patterns
The most common form of a ConvNet architecture stacks a few CONV-RELU layers, follows them with POOL layers, and repeats this pattern until the image has been merged spatially to a small size. At some point, it is common to transition to fully-connected layers. The last fully-connected layer holds the output, such as the class scores. In other words, the most common ConvNet architecture follows the pattern:
INPUT -> [[CONV -> RELU]*N -> POOL?]*M -> [FC -> RELU]*K -> FC
where the * indicates repetition, and the POOL? indicates an optional pooling layer. Moreover, N >= 0 (and usuallyN <= 3), M >= 0, K >= 0 (and usually K < 3). For example, here are some common ConvNet architectures you may see that follow this pattern:
INPUT -> FC, implements a linear classifier. HereN = M = K = 0.INPUT -> CONV -> RELU -> FCINPUT -> [CONV -> RELU -> POOL]*2 -> FC -> RELU -> FC. Here we see that there is a single CONV layer between every POOL layer.INPUT -> [CONV -> RELU -> CONV -> RELU -> POOL]*3 -> [FC -> RELU]*2 -> FCHere we see two CONV layers stacked before every POOL layer. This is generally a good idea for larger and deeper networks, because multiple stacked CONV layers can develop more complex features of the input volume before the destructive pooling operation.
Prefer a stack of small filter CONV to one large receptive field CONV layer. Suppose that you stack three 3x3 CONV layers on top of each other (with non-linearities in between, of course). In this arrangement, each neuron on the first CONV layer has a 3x3 view of the input volume. A neuron on the second CONV layer has a 3x3 view of the first CONV layer, and hence by extension a 5x5 view of the input volume. Similarly, a neuron on the third CONV layer has a 3x3 view of the 2nd CONV layer, and hence a 7x7 view of the input volume. Suppose that instead of these three layers of 3x3 CONV, we only wanted to use a single CONV layer with 7x7 receptive fields. These neurons would have a receptive field size of the input volume that is identical in spatial extent (7x7), but with several disadvantages. First, the neurons would be computing a linear function over the input, while the three stacks of CONV layers contain non-linearities that make their features more expressive. Second, if we suppose that all the volumes have CC channels, then it can be seen that the single 7x7 CONV layer would contain C×(7×7×C)=49C2C×(7×7×C)=49C2 parameters, while the three 3x3 CONV layers would only contain 3×(C×(3×3×C))=27C23×(C×(3×3×C))=27C2 parameters. Intuitively, stacking CONV layers with tiny filters as opposed to having one CONV layer with big filters allows us to express more powerful features of the input, and with fewer parameters. As a practical disadvantage, we might need more memory to hold all the intermediate CONV layer results if we plan to do backpropagation.
Layer Sizing Patterns
Until now we've omitted mentions of common hyperparameters used in each of the layers in a ConvNet. We will first state the common rules of thumb for sizing the architectures and then follow the rules with a discussion of the notation:
The input layer (that contains the image) should be divisible by 2 many times. Common numbers include 32 (e.g. CIFAR-10), 64, 96 (e.g. STL-10), or 224 (e.g. common ImageNet ConvNets), 384, and 512.
The conv layers should be using small filters (e.g. 3x3 or at most 5x5), using a stride of S=1S=1, and crucially, padding the input volume with zeros in such way that the conv layer does not alter the spatial dimensions of the input. That is, when F=3F=3, then using P=1P=1 will retain the original size of the input. When F=5F=5, P=2P=2. For a general FF, it can be seen that P=(F−1)/2P=(F−1)/2 preserves the input size. If you must use bigger filter sizes (such as 7x7 or so), it is only common to see this on the very first conv layer that is looking at the input image.
The pool layers are in charge of downsampling the spatial dimensions of the input. The most common setting is to use max-pooling with 2x2 receptive fields (i.e. F=2F=2), and with a stride of 2 (i.e. S=2S=2). Note that this discards exactly 75% of the activations in an input volume (due to downsampling by 2 in both width and height). Another sligthly less common setting is to use 3x3 receptive fields with a stride of 2, but this makes. It is very uncommon to see receptive field sizes for max pooling that are larger than 3 because the pooling is then too lossy and agressive. This usually leads to worse performance.
Reducing sizing headaches. The scheme presented above is pleasing because all the CONV layers preserve the spatial size of their input, while the POOL layers alone are in charge of down-sampling the volumes spatially. In an alternative scheme where we use strides greater than 1 or don't zero-pad the input in CONV layers, we would have to very carefully keep track of the input volumes throughout the CNN architecture and make sure that all strides and filters "work out", and that the ConvNet architecture is nicely and symmetrically wired.
Why use stride of 1 in CONV? Smaller strides work better in practice. Additionally, as already mentioned stride 1 allows us to leave all spatial down-sampling to the POOL layers, with the CONV layers only transforming the input volume depth-wise.
Why use padding? In addition to the aforementioned benefit of keeping the spatial sizes constant after CONV, doing this actually improves performance. If the CONV layers were to not zero-pad the inputs and only perform valid convolutions, then the size of the volumes would reduce by a small amount after each CONV, and the information at the borders would be "washed away" too quickly.
Compromising based on memory constraints. In some cases (especially early in the ConvNet architectures), the amount of memory can build up very quickly with the rules of thumb presented above. For example, filtering a 224x224x3 image with three 3x3 CONV layers with 64 filters each and padding 1 would create three activation volumes of size [224x224x64]. This amounts to a total of about 10 million activations, or 72MB of memory (per image, for both activations and gradients). Since GPUs are often bottlenecked by memory, it may be necessary to compromise. In practice, people prefer to make the compromise at only the first CONV layer of the network. For example, one compromise might be to use a first CONV layer with filter sizes of 7x7 and stride of 2 (as seen in a ZF net). As another example, an AlexNet uses filer sizes of 11x11 and stride of 4.
Case studies
There are several architectures in the field of Convolutional Networks that have a name. The most common are:
- LeNet. The first successful applications of Convolutional Networks were developed by Yann LeCun in 1990's. Of these, the best known is the LeNet architecture that was used to read zip codes, digits, etc.
- AlexNet. The first work that popularized Convolutional Networks in Computer Vision was the AlexNet, developed by Alex Krizhevsky, Ilya Sutskever and Geoff Hinton. The AlexNet was submitted to the ImageNet ILSVRC challenge in 2012 and significantly outperformed the second runner-up (top 5 error of 16% compared to runner-up with 26% error). The Network had a similar architecture basic as LeNet, but was deeper, bigger, and featured Convolutional Layers stacked on top of each other (previously it was common to only have a single CONV layer immediately followed by a POOL layer).
- ZF Net. The ILSVRC 2013 winner was a Convolutional Network from Matthew Zeiler and Rob Fergus. It became known as the ZFNet (short for Zeiler & Fergus Net). It was an improvement on AlexNet by tweaking the architecture hyperparameters, in particular by expanding the size of the middle convolutional layers.
- GoogLeNet. The ILSVRC 2014 winner was a Convolutional Network from Szegedy et al. from Google. Its main contribution was the development of an Inception Module that dramatically reduced the number of parameters in the network (4M, compared to AlexNet with 60M). Additionally, this paper uses Average Pooling instead of Fully Connected layers at the top of the ConvNet, eliminating a large amount of parameters that do not seem to matter much.
- VGGNet. The runner-up in ILSVRC 2014 was the network from Karen Simonyan and Andrew Zisserman that became known as the VGGNet. Its main contribution was in showing that the depth of the network is a critical component for good performance. Their final best network contains 16 CONV/FC layers and, appealingly, features an extremely homogeneous architecture that only performs 3x3 convolutions and 2x2 pooling from the beginning to the end. It was later found that despite its slightly weaker classification performance, the VGG ConvNet features outperform those of GoogLeNet in multiple transfer learning tasks. Hence, the VGG network is currently the most preferred choice in the community when extracting CNN features from images. In particular, their pretrained model is available for plug and play use in Caffe. A downside of the VGGNet is that it is more expensive to evaluate and uses a lot more memory and parameters (140M).
- ResNet. Residual Network developed by Kaiming He et al. was the winner of ILSVRC 2015. It features an interesting architecture with special skip connections and features heavy use of batch normalization. The architecture is also missing fully connected layers at the end of the network. The reader is also referred to Kaiming's presentation (video, slides), and some recent experiments that reproduce these networks in Torch.
VGGNet in detail. Lets break down the VGGNet in more detail. The whole VGGNet is composed of CONV layers that perform 3x3 convolutions with stride 1 and pad 1, and of POOL layers that perform 2x2 max pooling with stride 2 (and no padding). We can write out the size of the representation at each step of the processing and keep track of both the representation size and the total number of weights:
INPUT: [224x224x3] memory: 224*224*3=150K weights: 0
CONV3-64: [224x224x64] memory: 224*224*64=3.2M weights: (3*3*3)*64 = 1,728
CONV3-64: [224x224x64] memory: 224*224*64=3.2M weights: (3*3*64)*64 = 36,864
POOL2: [112x112x64] memory: 112*112*64=800K weights: 0
CONV3-128: [112x112x128] memory: 112*112*128=1.6M weights: (3*3*64)*128 = 73,728
CONV3-128: [112x112x128] memory: 112*112*128=1.6M weights: (3*3*128)*128 = 147,456
POOL2: [56x56x128] memory: 56*56*128=400K weights: 0
CONV3-256: [56x56x256] memory: 56*56*256=800K weights: (3*3*128)*256 = 294,912
CONV3-256: [56x56x256] memory: 56*56*256=800K weights: (3*3*256)*256 = 589,824
CONV3-256: [56x56x256] memory: 56*56*256=800K weights: (3*3*256)*256 = 589,824
POOL2: [28x28x256] memory: 28*28*256=200K weights: 0
CONV3-512: [28x28x512] memory: 28*28*512=400K weights: (3*3*256)*512 = 1,179,648
CONV3-512: [28x28x512] memory: 28*28*512=400K weights: (3*3*512)*512 = 2,359,296
CONV3-512: [28x28x512] memory: 28*28*512=400K weights: (3*3*512)*512 = 2,359,296
POOL2: [14x14x512] memory: 14*14*512=100K weights: 0
CONV3-512: [14x14x512] memory: 14*14*512=100K weights: (3*3*512)*512 = 2,359,296
CONV3-512: [14x14x512] memory: 14*14*512=100K weights: (3*3*512)*512 = 2,359,296
CONV3-512: [14x14x512] memory: 14*14*512=100K weights: (3*3*512)*512 = 2,359,296
POOL2: [7x7x512] memory: 7*7*512=25K weights: 0
FC: [1x1x4096] memory: 4096 weights: 7*7*512*4096 = 102,760,448
FC: [1x1x4096] memory: 4096 weights: 4096*4096 = 16,777,216
FC: [1x1x1000] memory: 1000 weights: 4096*1000 = 4,096,000
TOTAL memory: 24M * 4 bytes ~= 93MB / image (only forward! ~*2 for bwd)
TOTAL params: 138M parameters
As is common with Convolutional Networks, notice that most of the memory is used in the early CONV layers, and that most of the parameters are in the last FC layers. In this particular case, the first FC layer contains 100M weights, out of a total of 140M.
Computational Considerations
The largest bottleneck to be aware of when constructing ConvNet architectures is the memory bottleneck. Many modern GPUs have a limit of 3/4/6GB memory, with the best GPUs having about 12GB of memory. There are three major sources of memory to keep track of:
- From the intermediate volume sizes: These are the raw number of activations at every layer of the ConvNet, and also their gradients (of equal size). Usually, most of the activations are on the earlier layers of a ConvNet (i.e. first Conv Layers). These are kept around because they are needed for backpropagation, but a clever implementation that runs a ConvNet only at test time could in principle reduce this by a huge amount, by only storing the current activations at any layer and discarding the previous activations on layers below.
- From the parameter sizes: These are the numbers that hold the network parameters, their gradients during backpropagation, and commonly also a step cache if the optimization is using momentum, Adagrad, or RMSProp. Therefore, the memory to store the parameter vector alone must usually be multiplied by a factor of at least 3 or so.
- Every ConvNet implementation has to maintain miscellaneous memory, such as the image data batches, perhaps their augmented versions, etc.
Once you have a rough estimate of the total number of values (for activations, gradients, and misc), the number should be converted to size in GB. Take the number of values, multiply by 4 to get the raw number of bytes (since every floating point is 4 bytes, or maybe by 8 for double precision), and then divide by 1024 multiple times to get the amount of memory in KB, MB, and finally GB. If your network doesn't fit, a common heuristic to "make it fit" is to decrease the batch size, since most of the memory is usually consumed by the activations.
Visualizing and Understanding Convolutional Networks
In the next section of these notes we look at visualizing and understanding Convolutional Neural Networks.
Additional Resources
Additional resources related to implementation:
- DeepLearning.net tutorial walks through an implementation of a ConvNet in Theano
- cuda-convnet2 by Alex Krizhevsky is a ConvNet implementation that supports multiple GPUs
- ConvNetJS CIFAR-10 demo allows you to play with ConvNet architectures and see the results and computations in real time, in the browser.
- Caffe, one of the most popular ConvNet libraries.
- Example Torch 7 ConvNet that achieves 7% error on CIFAR-10 with a single model
- Ben Graham's Sparse ConvNet package, which Ben Graham used to great success to achieve less than 4% error on CIFAR-10.
from: http://cs231n.github.io/convolutional-networks/
卷积神经网络用于视觉识别Convolutional Neural Networks for Visual Recognition的更多相关文章
- Convolutional Neural Networks for Visual Recognition 8
Convolutional Neural Networks (CNNs / ConvNets) 前面做了如此漫长的铺垫,现在终于来到了课程的重点.Convolutional Neural Networ ...
- Convolutional Neural Networks for Visual Recognition 5
Setting up the data and the model 前面我们介绍了一个神经元的模型,通过一个激励函数将高维的输入域权值的点积转化为一个单一的输出,而神经网络就是将神经元排列到每一层,形 ...
- Convolutional Neural Networks for Visual Recognition 2
Linear Classification 在上一讲里,我们介绍了图像分类问题以及一个简单的分类模型K-NN模型,我们已经知道K-NN的模型有几个严重的缺陷,第一就是要保存训练集里的所有样本,这个比较 ...
- Convolutional Neural Networks for Visual Recognition 1
Introduction 这是斯坦福计算机视觉大牛李菲菲最新开设的一门关于deep learning在计算机视觉领域的相关应用的课程.这个课程重点介绍了deep learning里的一种比较流行的模型 ...
- Convolutional Neural Networks for Visual Recognition
http://cs231n.github.io/ 里面有很多相当好的文章 http://cs231n.github.io/convolutional-networks/ Table of Cont ...
- Convolutional Neural Networks for Visual Recognition 7
Two Simple Examples softmax classifier 后,我们介绍两个简单的例子,一个是线性分类器,一个是神经网络.由于网上的讲义给出的都是代码,我们这里用公式来进行推导.首先 ...
- cs231n spring 2017 lecture1 Introduction to Convolutional Neural Networks for Visual Recognition 听课笔记
1. 生物学家做实验发现脑皮层对简单的结构比如角.边有反应,而通过复杂的神经元传递,这些简单的结构最终帮助生物体有了更复杂的视觉系统.1970年David Marr提出的视觉处理流程遵循这样的原则,拿 ...
- cs231n spring 2017 lecture1 Introduction to Convolutional Neural Networks for Visual Recognition
1. 生物学家做实验发现脑皮层对简单的结构比如角.边有反应,而通过复杂的神经元传递,这些简单的结构最终帮助生物体有了更复杂的视觉系统.1970年David Marr提出的视觉处理流程遵循这样的原则,拿 ...
- 【论文笔记】Pyramidal Convolution: Rethinking Convolutional Neural Networks for Visual Recognition
地址:https://arxiv.org/pdf/2006.11538.pdf github:https://github.com/iduta/pyconv 目前的卷积神经网络普遍使用3×3的卷积神经 ...
随机推荐
- Python学习笔记之爬虫
爬虫调度端:启动爬虫,停止爬虫,监视爬虫运行情况 URL管理器:对将要爬取的和已经爬取过的URL进行管理:可取出带爬取的URL,将其传送给“网页下载器”网页下载器:将URL指定的网页下载,存储成一个字 ...
- POJ2104 K-th Number [整体二分]
题目传送门 K-th Number Time Limit: 20000MS Memory Limit: 65536K Total Submissions: 69053 Accepted: 24 ...
- ServletConfig对象和ServletContext对象
(1)ServletConfig:用来保存一个Servlet的配置信息的(比如 : name, class, url ... ) 这些配置信息没什么大用处,我们还可以在ServletConfig中保存 ...
- HTTP 缓存之ETag 和Cache-Control的使用方法介绍
什么是http缓存,有什么作用 通过网络获取内容既速度缓慢又开销巨大.较大的响应需要在客户端与服务器之间进行多次往返通信,这会延迟浏览器获得和处理内容的时间,还会增加访问者的流量费用.因此,缓存并重复 ...
- [leetcode sort]148. Sort List
Sort a linked list in O(n log n) time using constant space complexity. 以时间复杂度O(n log n)排序一个链表. 归并排序, ...
- 机器学习之路:python线性回归分类器 LogisticRegression SGDClassifier 进行良恶性肿瘤分类预测
使用python3 学习了线性回归的api 分别使用逻辑斯蒂回归 和 随机参数估计回归 对良恶性肿瘤进行预测 我把数据集下载到了本地,可以来我的git下载源代码和数据集:https://gith ...
- 洛谷.4512.[模板]多项式除法(NTT)
题目链接 多项式除法 & 取模 很神奇,记录一下. 只是主要部分,更详细的和其它内容看这吧. 给定一个\(n\)次多项式\(A(x)\)和\(m\)次多项式\(D(x)\),求\(deg(Q) ...
- hdu 1514 记忆化搜索
题意是给4堆(堆的高度小于等于40)有颜色(颜色的种类小于等于20)的物品,你有一个篮子最多能装5件物品,每次从这4堆物品里面任取一件物品放进篮子里,但是取每堆物品时,必须先取上面的物品,才能取下面的 ...
- nodejs环境使用jshint
一.概述jshint是检测JavaScript语法问题的工具,可以根据自己的需要配置检测规则. 二.安装npm install jshint -g一般全局安装就可以了,可以在任何目录下使用jshint ...
- python数据库操作——sqlite3模块
# -*- coding: utf-8 -*- ''' Version : Python27 Author : Spring God Date : 2012-4-26 ''' import sqlit ...