unity, 相机空间 与 相机gameObject的局部空间
在unity里 相机空间 与 相机gameObject的局部空间 不重合。
Camera.worldToCameraMatrix的文档中有这样一句话:
Note that camera space matches OpenGL convention: camera's forward is the negative Z axis. This is different from Unity's convention, where forward is the positive Z axis.
意思是说unity中相机gameObject的蓝轴是相机空间的-Z。
为了确认,做了如下实验:
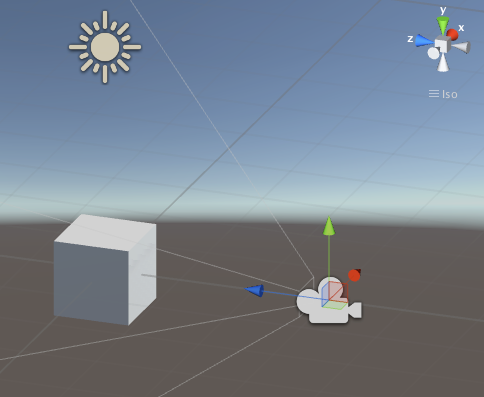
如图,立方体的坐标是(0,0,0),相机的坐标是(0,0,-3),我们要计算并输出立方体在相机空间的坐标。
做法是为立方体添加如下脚本:
using UnityEngine;
using System.Collections;
public class printPosInCameraSpace : MonoBehaviour {
public GameObject m_cameraRef;
// Use this for initialization
void Start () {
Matrix4x4 worldToCameraMat = m_cameraRef.GetComponent<Camera>().worldToCameraMatrix;
Vector3 thisPosInWorld = transform.position;
Vector3 thisPosInCamera = worldToCameraMat.MultiplyPoint (thisPosInWorld);
Debug.Log (thisPosInCamera);
}
}
并在编辑器中将camera赋给m_cameraRef.
然后运行脚本,得到输出结果为:(0,0,-3)。
这说明相机gameObject的蓝轴确实是相机空间-Z轴。
进一步实验:
将脚本改为:
using UnityEngine;
using System.Collections;
public class printPosInCameraGameObjectLocalSpace : MonoBehaviour {
public GameObject m_cameraRef;
// Use this for initialization
void Start () {
Matrix4x4 worldToCameraMat = m_cameraRef.transform.worldToLocalMatrix;
Vector3 thisPosInWorld = transform.position;
Vector3 thisPosInCamera = worldToCameraMat.MultiplyPoint (thisPosInWorld);
Debug.Log (thisPosInCamera);
}
}
输出结果为:(0,0,3)。
--结论:
相机空间 和 相机gameObject的局部空间 是不重合的。 图中这三个坐标轴表示的是 相机gameObject的局部空间。 而 相机空间 则Z轴方向与之相反。
图中这三个坐标轴表示的是 相机gameObject的局部空间。 而 相机空间 则Z轴方向与之相反。
Camera.worldToCameraMatrix是 世界空间to相机空间 矩阵。Camera.transform.worldToLocalMatrix是 世界空间to相机gameObject的局部空间 矩阵,两个矩阵是不一样的。
unity, 相机空间 与 相机gameObject的局部空间的更多相关文章
- 【Unity】2.8 相机(Camera)
分类:Unity.C#.VS2015 创建日期:2016-03-31 一.简介 Unity的相机用来向玩家呈现游戏世界.你在场景中始终至少有一个相机,但也可以有多个.多个相机可以带给您双人分屏效果或创 ...
- Android调用系统相机、自定义相机、处理大图片
Android调用系统相机和自定义相机实例 本博文主要是介绍了android上使用相机进行拍照并显示的两种方式,并且由于涉及到要把拍到的照片显示出来,该例子也会涉及到Android加载大图片时候的处理 ...
- 有关默认相机转VR相机
呃...15年开篇~ 去年想写一个有关默认相机转VR相机的脚本,当时没写完,今天不小心翻到并写完了,而且思路也和原来完全不一样了,增加了是否删除原相机与是否转换所选相机的选项. 由于国内VR版本比较混 ...
- 干货 | LIDAR、ToF相机、双目相机如何科学选择?
点击"计算机视觉life"关注,置顶更快接收消息! 本文阅读时间约5分钟 本文翻译自卡内基梅隆大学 Chris asteroid 三维视觉技术的选择 传感器参数及定义 LIDAR ...
- 3dmax 物体的真正局部空间原点
假设在3dmax中创建一个 长x宽x高=1cm x 1cm x 1cm 的单位立方体,则默认局部坐标系原点在底面中心,进入 “层次”面板->轴->调整轴,按下“仅影响轴”,再点“居中到对象 ...
- cocos2dx 3.3将坐标由父空间转化到局部空间
设在node的父空间内有一点p,要求其转化到node局部空间后的坐标p_local,代码如下: node->getNodeToParentTransform();//in order node- ...
- OpenGL 的空间变换(下):空间变换
通过本文的上篇 OpenGL 的空间变换(上):矩阵在空间几何中的应用 ,我们了解到矩阵的基础概念.并且掌握了矩阵在空间几何中的应用.接下来,我们将结合矩阵来了解 OpenGL 的空间变换. 在使用 ...
- 有一台机器,上面有m个储存空间。然后有n个请求,第i个请求计算时需要占 R[i]个空间,储存计算结果则需要占据O[i]个空间(据O[i]个空间(其中O[i]<R[i])。问怎么安排这n个请求的顺序,使
有一台机器,上面有m个储存空间.然后有n个请求,第i个请求计算时需要占 R[i]个空间,储存计算结果则需要占据O[i]个空间(据O[i]个空间(其中O[i]<R[i]).问怎么安排这n个请求的顺 ...
- [原][数学][C++][osg]空间向量OA到转到空间向量OB、以及四元素Q1转到Q2的函数
注意:Oa其实在OK的延长线上,上图只是为了好看才把Oa和OK分开了 算法需求如图所示: 已知空间向量OA和空间向量OB 我想算出OA向OB按某角度或者某时间移动 变成空间向量Oa的算法 先说废话:我 ...
随机推荐
- [转] NSMapTable 不只是一个能放weak指针的 NSDictionary
NSMapTable 不只是一个能放weak指针的 NSDictionary NSMapTable是早在Mac OS X 10.5(Leopard)的引入集合类.乍一看,这似乎是作为一个替换NSDic ...
- 《Hadoop应用开发技术详解》
<Hadoop应用开发技术详解> 基本信息 作者: 刘刚 丛书名: 大数据技术丛书 出版社:机械工业出版社 ISBN:9787111452447 上架时间:2014-1-10 出版日期:2 ...
- C99规范
. 增加restrict指针 C99中增加了公适用于指针的restrict类型修饰符,它是初始访问指针所指对象的惟一途径,因此只有借助restrict指针表达式才能访问对象.restrict指针指针主 ...
- TCP常用网络和木马使用端口对照表,常用和不常用端口一览表
[开始-运行- CMD , 输入 netstat -an 然后回车就可以查看端口] 端口: 服务:Reserved 说明:通常用于分析操作系统.这一方法能够工作是因为在一些系统中“”是无效端口,当你试 ...
- iOS:三种数据库的小总结
三种数据库总结:sqlite.FMDB.CoreData 1.sqlite数据库(C语言)需要方法和属性: (1)数据类型: –INTEGER 有符号的整数类型 –REAL 浮点类型 –TEXT ...
- Powerdesigner数据库建模--概念模型--ER图
目标: 本文主要介绍PowerDesigner中概念数据模型 CDM的基本概念. 一.概念数据模型概述 数据模型是现实世界中数据特征的抽象.数据模型应该满足三个方面的要求: 1)能够比较真实地模拟现实 ...
- 第三章 线程安全的DateFormat工具类
1.使用threadLocal包装DateFormat(太复杂,不推荐) 2.使用org.apache.commons.lang3.time.DateFormatUtils下的方法(推荐) DateF ...
- 9个实用的Javascript代码高亮脚本
代码高亮很有用,特别是在需要在网站或者blog中显示自己编写的代码的时候,或者给其他人查看或调试语法错误的时候.我们可以将代码高亮,以便阅读者可以十分方便的读取代码块,增加用户阅读代码的良好体验. 目 ...
- SQL OUTER JOIN
When we want to select out all the record from two table, no matter it's present at second table or ...
- http响应报文,如果响应的内容比较大,客户端怎么样判断接收完了呢?
1. http协议有正文大小说明的content-length 2. 或者分块传输chunked的话 读到0\r\n\r\n 就是读完了 ---------------------------- ...