【文献07】基于MPC的WMR点镇定-极坐标系下和轨迹跟踪
参考:
Kuhne F , Lages W , Silva J D . Point stabilization of mobile robots with nonlinear model predictive control[J]. 2005.
Point Stabilization for Wheeled Mobile Robots Using Model Predictive Control
Gu D , Hu H . Receding Horizon tracking control of wheeled mobile robots[J]. IEEE Transactions on Control Systems Technology, 2006, 14(4):743-749.
https://drive.wps.cn/mine/28717934032
【1】Kuhne F , Lages W , Silva J D . Point stabilization of mobile robots with nonlinear model predictive control[J]. 2005.
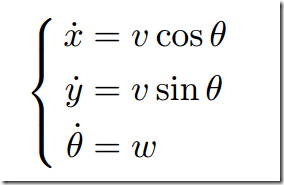
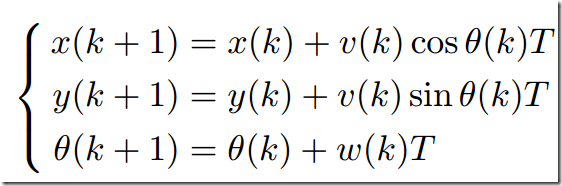
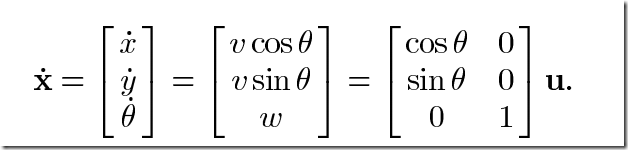
运动学模型

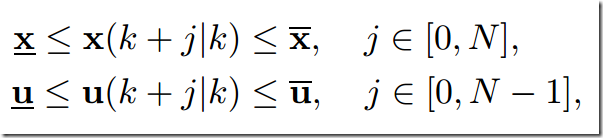
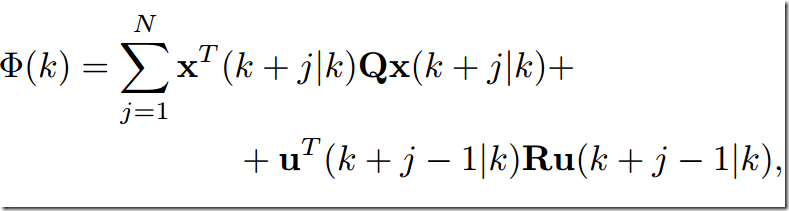
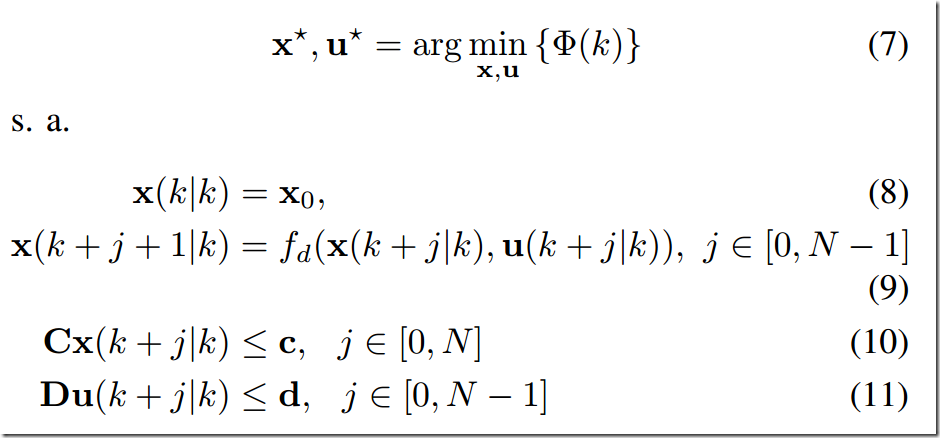
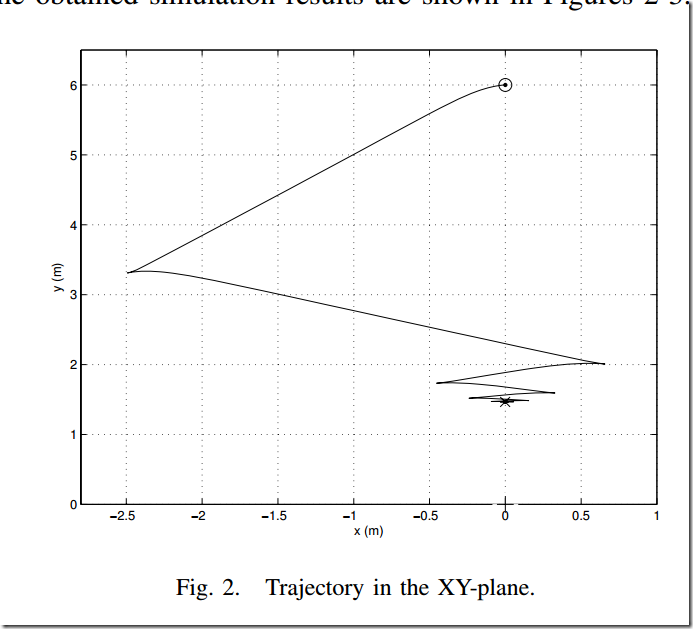
MPC控制-无终端项
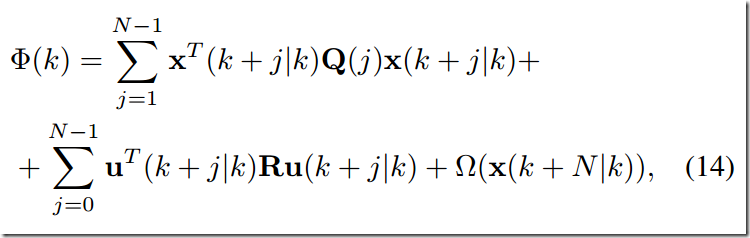
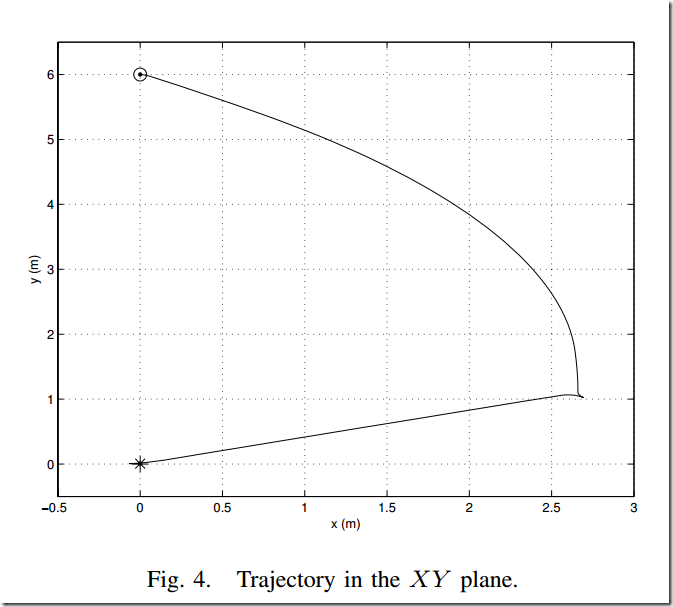
MPC控制-加入终端项
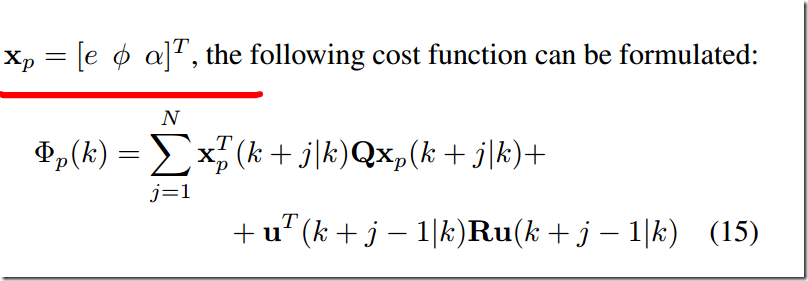
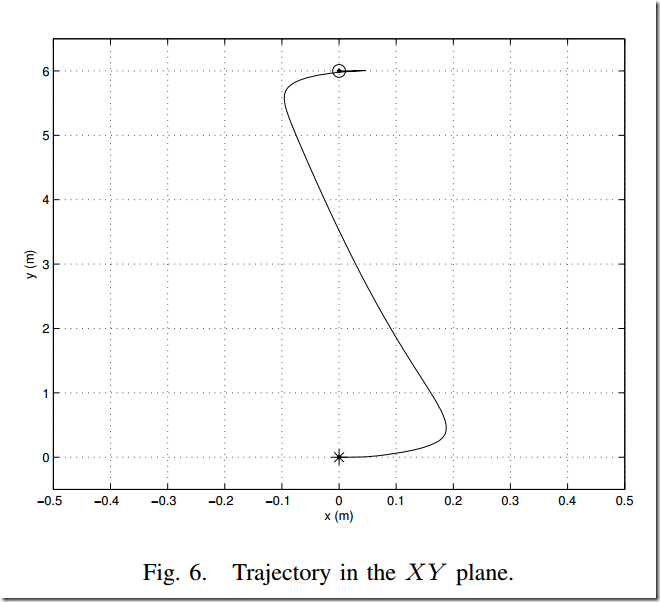
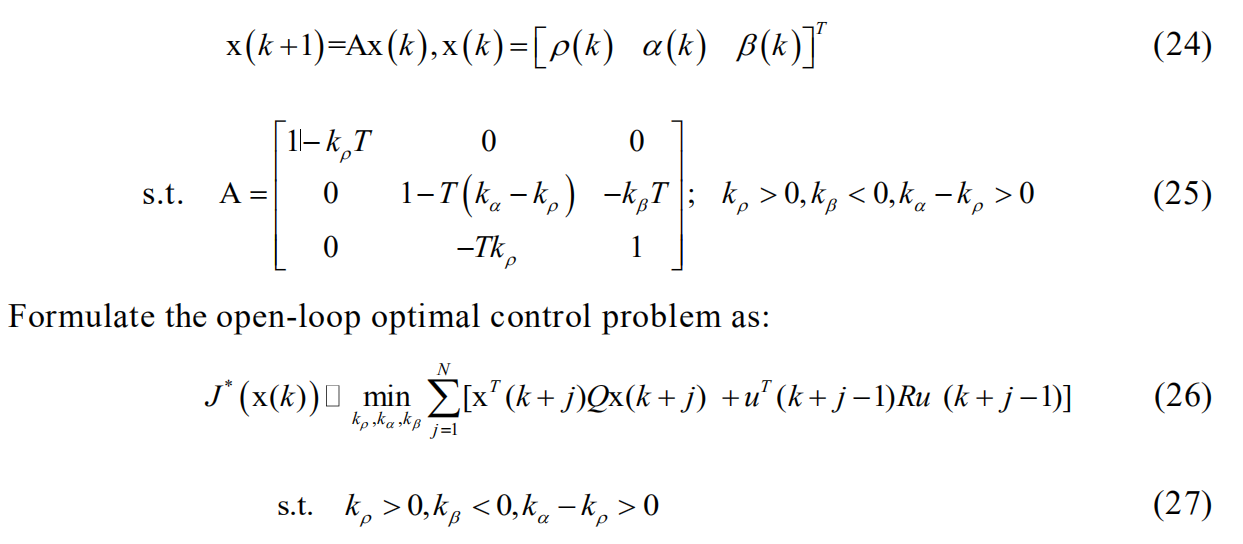
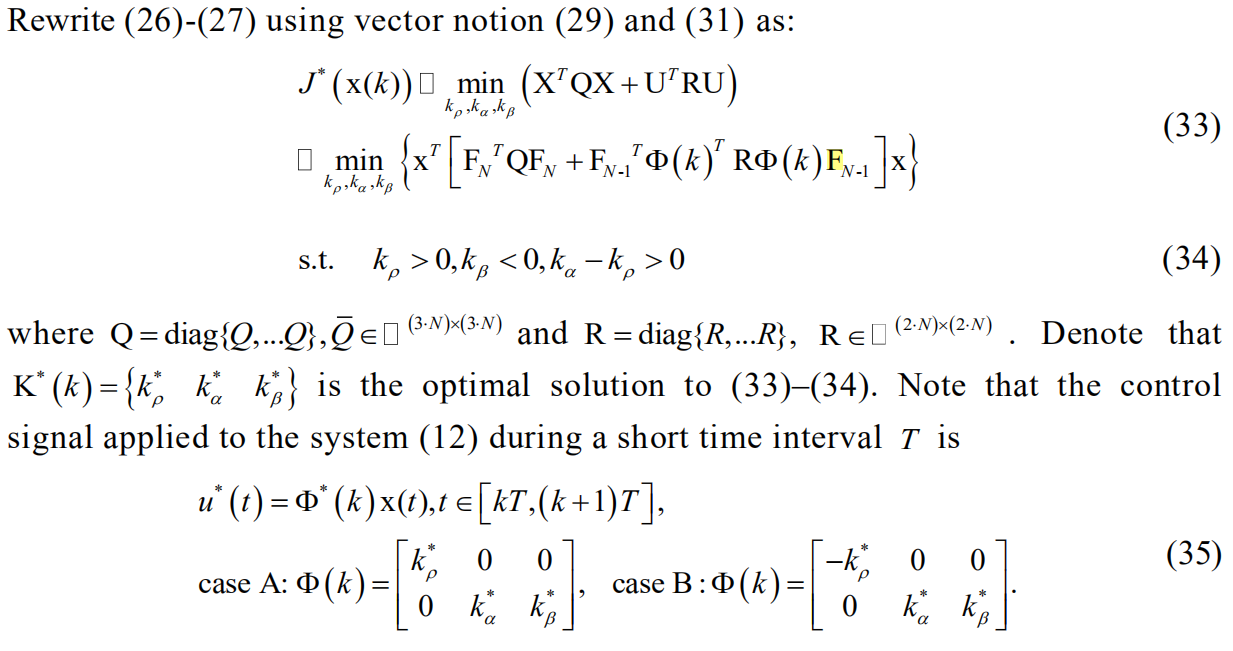
MPC控制-极坐标系下

【2】Point Stabilization for Wheeled Mobile Robots Using Mode Predictive Control

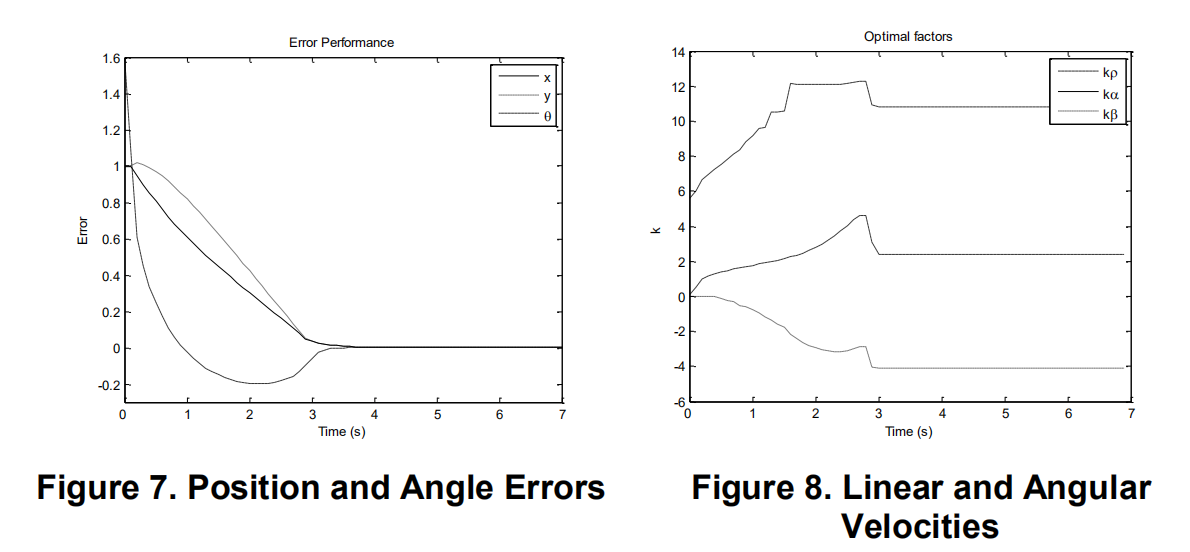
【3】Gu D , Hu H . Receding Horizon tracking control of wheeled mobile robots[J]. IEEE Transactions on Control Systems Technology, 2006, 14(4):743-749.



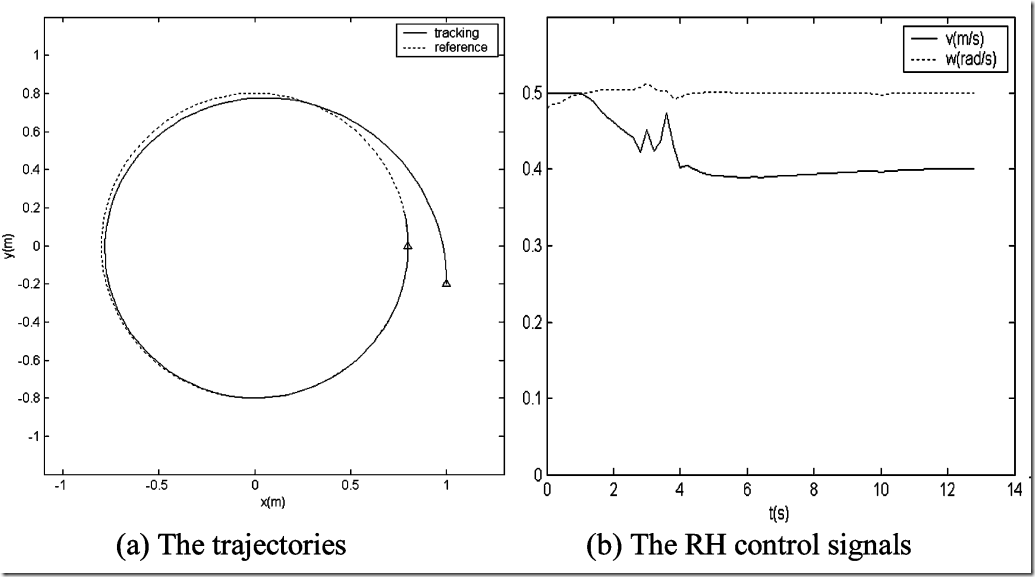
圆形仿真
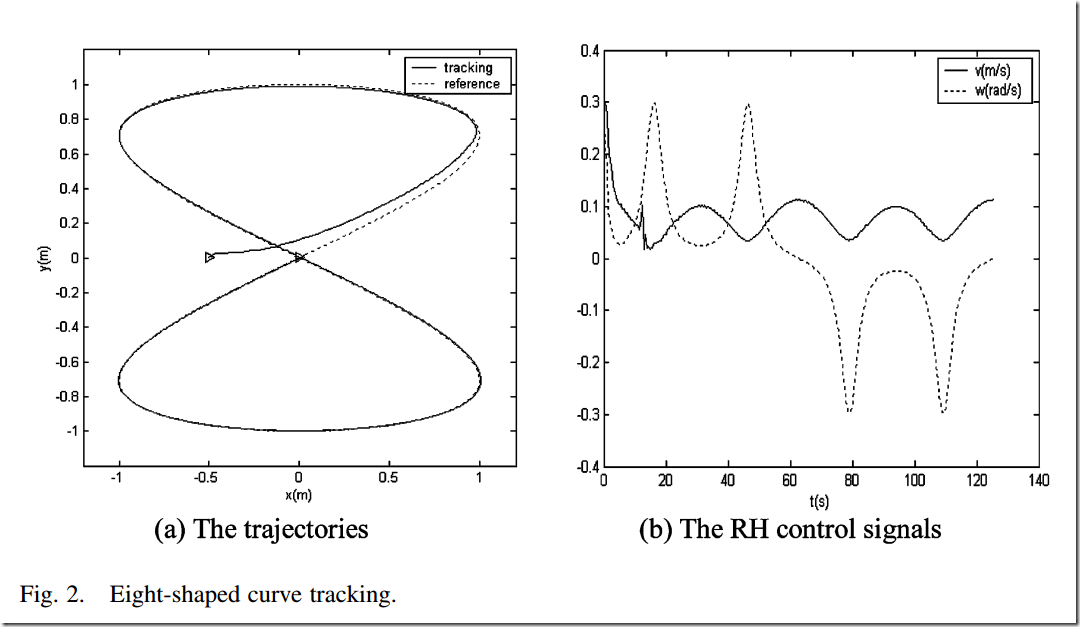
8字形
平行泊车

【文献07】基于MPC的WMR点镇定-极坐标系下和轨迹跟踪的更多相关文章
- 李飞飞团队最新论文:基于anchor关键点的类别级物体6D位姿跟踪
6-PACK: Category-level 6D Pose Tracker with Anchor-Based Keypoints 论文地址: 6-PACK: Category-level 6D P ...
- 【GWAS文献】基于GWAS与群体进化分析挖掘大豆相关基因
Resequencing 302 wild and cultivated accessions identifies genes related to domestication and improv ...
- 《精通并发与Netty》学习笔记(07 - 基于Thrift实现Java与Python的RPC调用)
上节我们介绍了基于Thrift实现java与java的RPC调用,本节我们基于Thrift实现Java与Python的RPC调用 首先,修改data.thirft文件,将命名空间由java改为py n ...
- Spring框架学习07——基于传统代理类的AOP实现
在Spring中默认使用JDK动态代理实现AOP编程,使用org.springframework.aop.framework.ProxyFactoryBean创建代理是Spring AOP 实现的最基 ...
- 07.基于IDEA+Spring+Maven搭建测试项目--logback.xml配置
<?xml version="1.0" encoding="UTF-8"?> <configuration> <!-- 控制台日志 ...
- 基于MPC算法的车辆多目标自适应巡航控制系统研究_荆亚杰
- 基于单细胞测序数据构建细胞状态转换轨迹(cell trajectory)方法总结
细胞状态转换轨迹构建示意图(Trapnell et al. Nature Biotechnology, 2014) 在各种生物系统中,细胞都会展现出一系列的不同状态(如基因表达的动态变化等),这些状态 ...
- 吴裕雄--天生自然 神经网络人工智能项目:基于深度学习TENSORFLOW框架的图像分类与目标跟踪报告(续四)
2. 神经网络的搭建以及迁移学习的测试 7.项目总结 通过本次水果图片卷积池化全连接试验分类项目的实践,我对卷积.池化.全连接等相关的理论的理解更加全面和清晰了.试验主要采用python高级编程语言的 ...
- 【文献08】多移动机器人轨迹跟踪控制系统设计与实现-运动学ADRC控制
参考: 陈俊, 俞立, 滕游. 多移动机器人轨迹跟踪控制系统设计与实现[J]. 计算机测量与控制, 2017(7). https://drive.wps.cn/view/p/28819052019?f ...
随机推荐
- Oracle ROWNUM用法和分页查询总结
**************************************************************************************************** ...
- [No0000194]聊聊 Chrome DevTools 中你可能不知道的调试技巧
对于前端开发者来说,ChromeDevTools 绝对是不可或缺的调试工具,我们常用的调试方法包含一些console等,而ChromeDevTools 其实很强大,下面来聊聊一些你可能不知道的debu ...
- servlet转发重定向
1.request.getRequestDispacther("/test.jsp").forword(request,response); 转发 浏览器URL是一个地 ...
- 审核被拒:1. 1 Safety: Objectionable Content ;3. 1.1 Business: Payments - In-App Purchase ;4. 3 Design: Spam ;5. 1.1 Legal: Privacy - Data Collection and Storage
1. 1 Safety: Objectionable Content 有人民币符号—隐藏收费课程 3. 1.1 Business: Payments ...
- LeetCode 993 Cousins in Binary Tree 解题报告
题目要求 In a binary tree, the root node is at depth 0, and children of each depth k node are at depth k ...
- windows 10 超级优化,同时解决本地磁盘100%的问题
windows 10 超级优化,同时解决本地磁盘100%的问题 我的系统是笔记本I7处理器,配置了web服务器IIS 和一个数据库(mysql7),同时启用了虚拟机(表中已禁用),以及安装了offic ...
- python摸爬滚打之day26----网络编程之socket
1.网络通信原理 互联网的本质就是一系列的网络协议, 统称为互联网协议. 互联网协议的功能:定义计算机如何接入internet,以及接入internet的计算机通信的标准. 互联网协议按照功能不同分为 ...
- python基础之 面向对象
1.什么是面向对象? 在大学学习c#的时候接触面向对象,知道好像有什么方法,属性,人狗大战啥的.但是都忘记了,也不知道面向对象到底是个啥! 在python中一切都是对象,linux中一切都是文件(突然 ...
- MFC 的资源文件 就是那个后缀名是 .rc的那个
参考: http://blog.csdn.net/zgrjkflmkyc/article/details/16897881 http://www.oschina.net/question/565065 ...
- hashlib、hmac
#hashlib import hashlib#md5m = hashlib.md5()m.update(b"Hello")print(m.hexdigest()) #hexdig ...