NOKOV动作捕捉系统使多场协同无人机自主建造成为可能
近年来,工业机器人的兴起使得建造的效率和安全性得以提升,但由于机器人由于大小与活动范围的限制,在大型建筑上难以施展拳脚。上海同济大学建筑系的无人机自主建造小组,正在进行以无人机取代工业机器人进行空中建造为目的,进行无人机自主建造系统的研究,系统由无人机空间位姿反馈和地面站轨迹控制两部分组成。该小组先在一定规模的场地中布置适用场景进行无人机飞行,通过无人机空间位姿的获取,设计地面站控制系统,之后便可将装置的尺度扩大到真实建造的尺度,进行建筑建造。
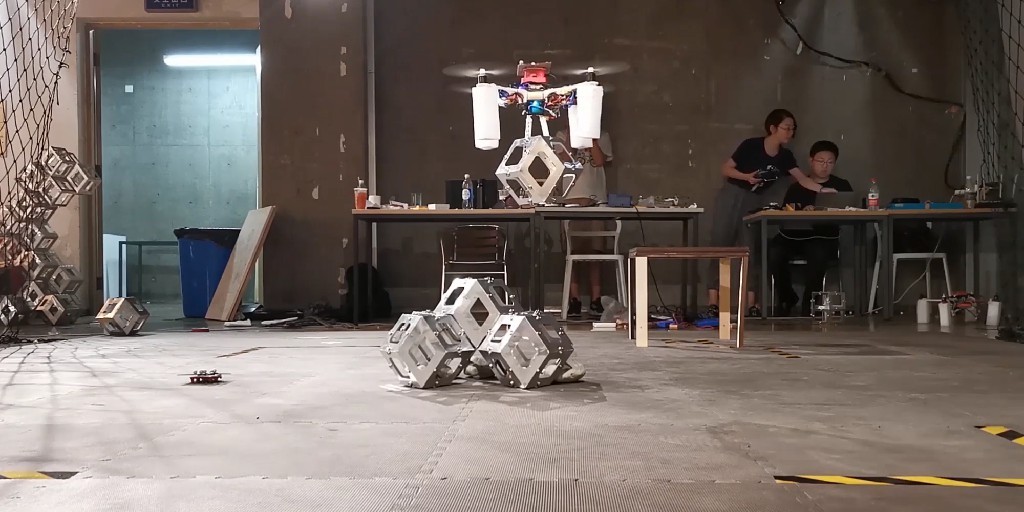
无人机空间位姿的获取,是通过NOKOV度量光学三维动作捕捉系统作为空间定位系统,主要依赖于其精确到亚毫米的高精度捕捉。在层高2.5m,工作区域面积约为5m*6m的环境下,该小组使用了8个动作捕捉镜头组成无人机室内定位系统。动作捕捉镜头通过捕捉固定在无人机上的特制反光标志点,以200Hz的频率记录无人机在空间中的位置信息。获取的数据通过特定算法,得到无人机的六自由度6DoF信息,包括三维空间XYZ坐标,偏航角Yaw,横滚角Roll以及俯仰角Pitch。
无人机定位数据(6DoF数据等)的数据,实时被控制系统中的飞控程序所获取,用自带的传感器数据进行LPE(Local Position Estimate)计算,用于实时更新无人机相对于全局坐标系的位置估计。之后再通过轨迹规划,协调多台无人机执行砌筑、搬运等任务时在多个航点间的移动方式,确保在操作过程中飞行器的安全以及砌筑顺序的正确。
在基于室内动作捕捉系统的无人机自主建造实时控制系统和可视化界面平台上,该小组现已完成了全部由无人机自主完成的搭建试验,向实现空中无人机自主建造的目标更近了一步。希望在将来,动作捕捉技术能够让无人机协同系统在更多的学科、行业发展中实现成本优化与效率提升,发挥巨大作用。
参考文献:[1]郭喆,陆明,王祥.基于无人机的离散结构自主建造技术初探[J].建筑技艺,2019(09):40-45.
NOKOV动作捕捉系统使多场协同无人机自主建造成为可能的更多相关文章
- 光荣与梦想 | XMove动作捕捉系统(一)
XMove是我和几个死党从2010年开始开发的一套人体动作捕捉系统,软硬件全部自行开发,投入了大量的精力,历经三年,发展四个版本. 今年春节回到老家,翻出了2011年春节时焊电路用过的松香和和硬盘角落 ...
- 光学动作捕捉系统中的反光标识点(Marker点)
动作捕捉系统本质上是一种定位系统,通常需要在目标物布置定位设备进行追踪.以红外光学为原理的动作捕捉系统,主要由由光学镜头.动作捕捉软件.反光标识点.POE交换机.和若干配件组成,其中反光标识点(Mar ...
- 真人动作捕捉系统 for Unity
真人动作捕捉 在Asset Store中浏览Mecanim相关的资源时,发现了这个 资源信息 Asset Store:https://www.assetstore.unity3d.com/#/cont ...
- VUP虚拟直播与光学动作捕捉技术
虚拟直播将虚拟场景.虚拟形象实时显示在观众面前,虚拟场景与人物替代了原有的耗费较大搭建成本的实景场景与真人出镜,为观众带来全新的视觉体验,同时新技术降低了原有场景搭建成本,是近些年继AI.VR.动作捕 ...
- 自述创业史 | XMove动作感应系统(二)
XMove是沙漠君和几个死党从2010年开始开发的一套人体动作捕捉系统,软硬件全部自行开发,投入了大量的精力,历经三年,发展四个版本.文章分上下篇,本文为下篇,前三代的故事在<光荣与梦想| XM ...
- AI动作捕捉技术,会让制造业大幅度降低成本吗?
现代动作捕捉系统应该是起源于100多年前的动画工业,通过一种叫做"动态遮罩或影像描摹"的技术,动画师们可以获得流畅的.栩栩如生的动作:后来到了20世纪80年代,动画师们设计出带有活 ...
- 短期连载 第1回 万代南梦宫工作室动画的流派 BNS动作捕捉汐留工作室的采访
原文链接:http://cgworld.jp/interview/201607-bandainamco.html 因开发了[偶像大师],[铁拳],[XX传说]系列等各种游戏而被广为人知的万代南 ...
- Saiku嵌入系统使用时传参数访问saiku(十六)
Saiku嵌入系统使用时传参数访问saiku Saiku通过iframe嵌入其他系统使用时,我们可以设定参数信息,然后根据url中参数对结果进行筛选哦. 这里我们实现的是根据日期字段进行范围查询,UR ...
- 人体动作捕捉格式之BVH
BVH简介 BVH是BioVision公司推出的一种人体动作捕捉文件格式.这种文件以节点为核心元素,记录连续数帧内人体骨架的运动. BVH=? 研究一个东西的时候我比较喜欢先研究它的名字.BVH可以认 ...
- 推荐系统入门:作为Rank系统的推荐系统(协同过滤)
知乎:如何学习推荐系统? 知乎:协同过滤和基于内容的推荐有什么区别? 案例:推荐系统实战? 数据准备:实现推荐栏位:重构接口:后续优化. 简书:实现实时推荐系统的三种方式?基于聚类和协同过滤:基于S ...
随机推荐
- RTMP协议学习——从握手到播放
从客户端发起播放请求,到rtrmp视频流开始播放,大致经过了握手->建立连接->创建流->播放这几步比较重要的步骤.下面我将结合wireshark的抓包,对其中的每个流程进行分析和学 ...
- salesforce零基础学习(一百三十四)State And Country/Territory Picklists启用后的趣事
本篇参考: https://help.salesforce.com/s/articleView?id=sf.admin_state_country_picklists_overview.htm& ...
- Istio 网格的出口定义者:深入了解 Egress Gateway
本文分享自华为云社区<Istio Egress 出口网关使用>,作者:k8s技术圈. 前面我们了解了位于服务网格内部的应用应如何访问网格外部的 HTTP 和 HTTPS 服务,知道如何通过 ...
- Excel表格函数公式出现溢出怎么办?
Excel是一款广泛使用的电子表格软件,它可以帮助我们进行各种计算.数据分析与处理等操作.在使用Excel时,我们通常需要使用到各种函数公式来完成不同的任务.然而,在使用函数公式时有时会出现" ...
- 汇报工作与众不同:在PPT中展示Datainside动态图表
题目要求了解在PPT中展示Datainside动态图表,下面是关于该主题的详细介绍. 内容可视化:概念与定义 内容可视化(Data Visualization)是将数据以图形或其他视觉形式呈现的过程, ...
- Netty源码学习7——netty是如何发送数据的
零丶引入 系列文章目录和关于我 经过<Netty源码学习4--服务端是处理新连接的&netty的reactor模式和<Netty源码学习5--服务端是如何读取数据的>,我们了 ...
- 神经网络入门篇:详解参数VS超参数(Parameters vs Hyperparameters)
参数 VS 超参数 什么是超参数? 比如算法中的learning rate \(a\)(学习率).iterations(梯度下降法循环的数量).\(L\)(隐藏层数目).\({{n}^{[l]}}\) ...
- React 中虚拟DOM是什么,为什么需要它?
注意:本节主要讲React中的虚拟DOM,但是虚拟DOM并不是React中特有的内容. 1. React 中虚拟 DOM是什么? 虚拟DOM是对真实DOM的描述,虚拟DOM是JS对象,实际上就是 JS ...
- ElasticSearch索引生命周期策略配置(ES TTL)
背景 有些索引数据作为临时数据存放,一段时间后我们希望索引可以自动过期删除,就是常说的TTL(Time To Live)机制 ElasticSearch索引数量过多会占用很多主分片和副本分片,最终导致 ...
- Tensorflow2.0使用Resnet18进行数据训练
在今年的3月7号,谷歌在 Tensorflow Developer Summit 2019 大会上发布 TensorFlow 2.0 Alpha 版,随后又发布了Beta版本. Resnet18结构 ...