【论文阅读】ICRA2022: Panoptic Multi-TSDFs: a Flexible Representation for Online Multi-resolution Volumetric Mapping and Long-term Dynamic Scene Consistency
Type: ICRA
Year: 2022
tag: SLAM
1. Motivation
为了和环境内其他机器人进行交互,access to volumetric and semantic maps是很重要的。而对于长时间段,环境多少都会发生变化,而构建地图时我们也应当考虑到这点
提出了一种针对变换环境的 novel representation panoptic multi-TSDFs for multi-resolution volumetric mapping
背景介绍
volumetric representations:
- occupancy
- Truncated Signed Distance Fields (TSDF)
但是这类fixed grid结构使得这一类方法耗memory 而且对于变化的东西 渲染也不灵活变化,本篇工作主要是 invert this paradigm and explore how semantic information can be leveraged to improve the modeling of geometry and achieve temporal consistency,也就是如何利用语音信息进行改进 几何建模 并 实现时空上的连续性
- [11, 12] spatially consistent volumetric mapping
- [5, 6, 13] moving object reconstruction
Contribution
- 提出了全景 multi-TSDF 作为可调整的volumetric map representation,这样能满足capture long-term object-level scene changes
- 提出了能使 全景 multi-TSDF 在 online operation 对 temporally consistent mapping
- 相关实验及开源
2. Method
本工作并不是优化 segmantic labeling,而是 explore high-level information 以便能实现 多分辨率三维重建和temporal consistency
2.1 框架
输入是RGBD相机上的彩色图像和深度图像,由此来预测我们的语义信息,此处主要使用了[33]的语义输出,所以文章整体的重点并不是在如何构建语义地图,而是从别的模块拿取这一信息
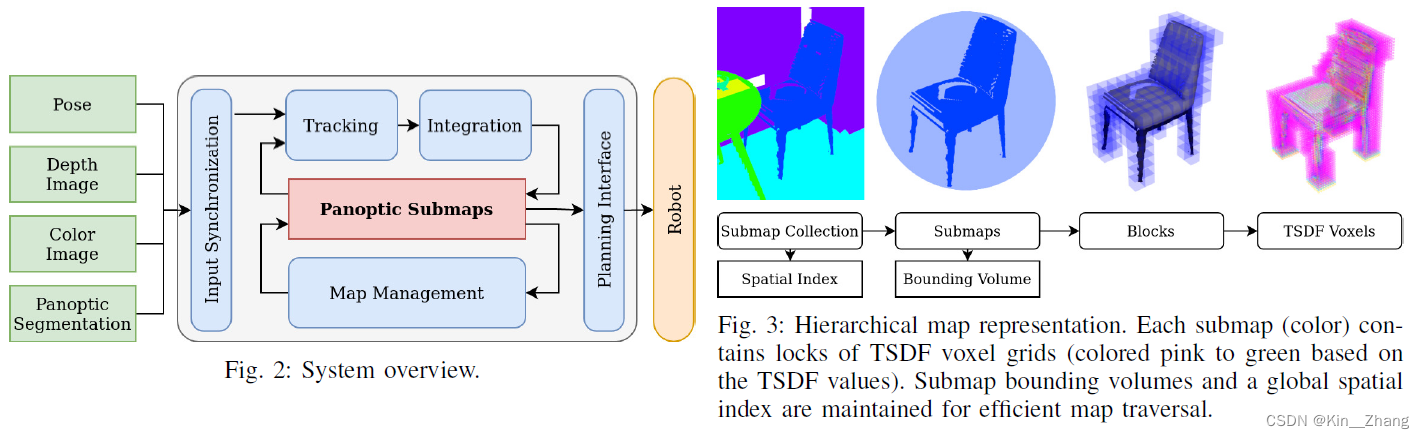
2.2 地图表示
主要是使用object作为最小的单位,然后整个world就是 a collection of panoptic entities, structured as submaps,所以我们将分为三类:objects, background, free space,每一个submaps包含有这个entity的信息,比如类别或是free space ,为了是实现每个submap的temporal consistency,我们将其分为active和inactive的,其中
- active 表明 现在正在被跟踪、建立
- inactive则是 过去的观测 observations
为了表示几何,我们选取TSDF grids[2]进行表示,同时TSDF可以融合多帧观测;被object占据的空间会分成blocks,只有blocks才包含有surface information
对于traversal submap,则是将object在blocks上用一个球进行扩展;每个block都包含有 a dense grid of voxels 去存储TSDF值
2.3 Label Tracking
首先是使用了marching cubes [34] 对每个submap的iso-surface进行计算,随后将view frustum上的点投影到图像平面中
对于点的深度有tolerance \(\xi_d=\nu\) 其中v表明TSDF的voxel size,当此深度被认为是有效的时候,填充此patch为v,注意input segment以IoU进行筛选
在label tracking和更新时,submaps为被跟踪t=3帧来确保它被kept,如果submaps在t=5帧间没有被检测,则视为deactivated
2.4 Integration 集成
TSDF的更新权重 [2],其中fx, fy为相机的参数,z(v)为v voxel的深度值
\]
对应函数:
float ProjectiveIntegrator::computeWeight(const Point& p_C,
const float voxel_size,
const float truncation_distance,
const float sdf) const {
// This approximates the number of rays that would hit this voxel.
float weight =
cam_config_->fx * cam_config_->fy * std::pow(voxel_size / p_C.z(), 2.f);
// Weight reduction with distance squared (according to sensor noise models).
if (!config_.use_constant_weight) {
weight /= std::pow(p_C.z(), 2.f);
}
// Apply weight drop-off if appropriate.
if (config_.use_weight_dropoff) {
const float dropoff_epsilon =
config_.weight_dropoff_epsilon > 0.f
? config_.weight_dropoff_epsilon
: config_.weight_dropoff_epsilon * -voxel_size;
if (sdf < -dropoff_epsilon) {
weight *=
(truncation_distance + sdf) / (truncation_distance - dropoff_epsilon);
weight = std::max(weight, 0.f);
}
}
return weight;
}
关于每个voxel上的概率更新
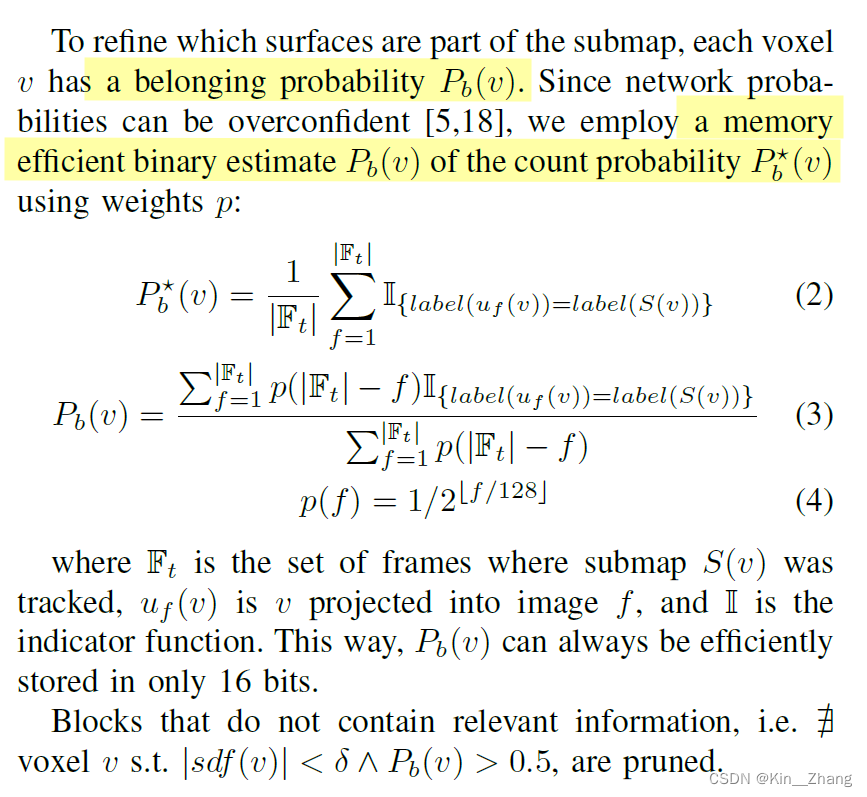
代码对应 count probability 公式(2)
float BinaryCountVoxel::getBelongingProbability() const {
return static_cast<float>(belongs_count) /
static_cast<float>(belongs_count + foreign_count);
}
void BinaryCountVoxel::incrementCount(const int id, const float weight) {
// ID 0 is used for belonging voxels.
if (id == 0u) {
belongs_count++;
} else {
foreign_count++;
}
}
2.4 Map Management
首先是关于inactive submaps会frozen 仅对他们状态进行更新 \(C(S) \in \{\text{persistent, unobserved, absent}\}\)
为了对比两个submaps,我们对每个iso-surface point的SDF和weight进行插值。
如果sdf小于一个值,则加入进更新和计算。
\]
结合TSDF权重,再给对应每个点权重的更新
float TsdfRegistrator::computeCombinedWeight(float w1, float w2) const {
if (w1 <= 0.f || w2 <= 0.f) {
return 0.f;
} else if (w1 >= config_.normalization_max_weight &&
w2 >= config_.normalization_max_weight) {
return 1.f;
} else {
return std::sqrt(std::min(w1 / config_.normalization_max_weight, 1.f) *
std::min(w2 / config_.normalization_max_weight, 1.f));
}
}
// Compute the weight to be used for counting.
if (config_.normalize_by_voxel_weight) {
weight = computeCombinedWeight(weight, point.weight);
total_weight += weight;
} else {
weight = 1.f;
}
为了在下游任务中使用,efficient queries are 是很重要的(迅速查询)。为了实现这一特性,对于我们的hierarchical map representation 我们仅考虑与查询点p相交的submaps和blocks
- 如果这个点是处于active submap,直接使用最高的分辨率
- 否则sdf(p) 则为到 any persistent submap 的最小距离
3. 实验及结果
首先是我们的方法在重建误差上最小,同时因为multi-resolution,能保持与其他方法在相同范围分辨率情况下的map size也更小
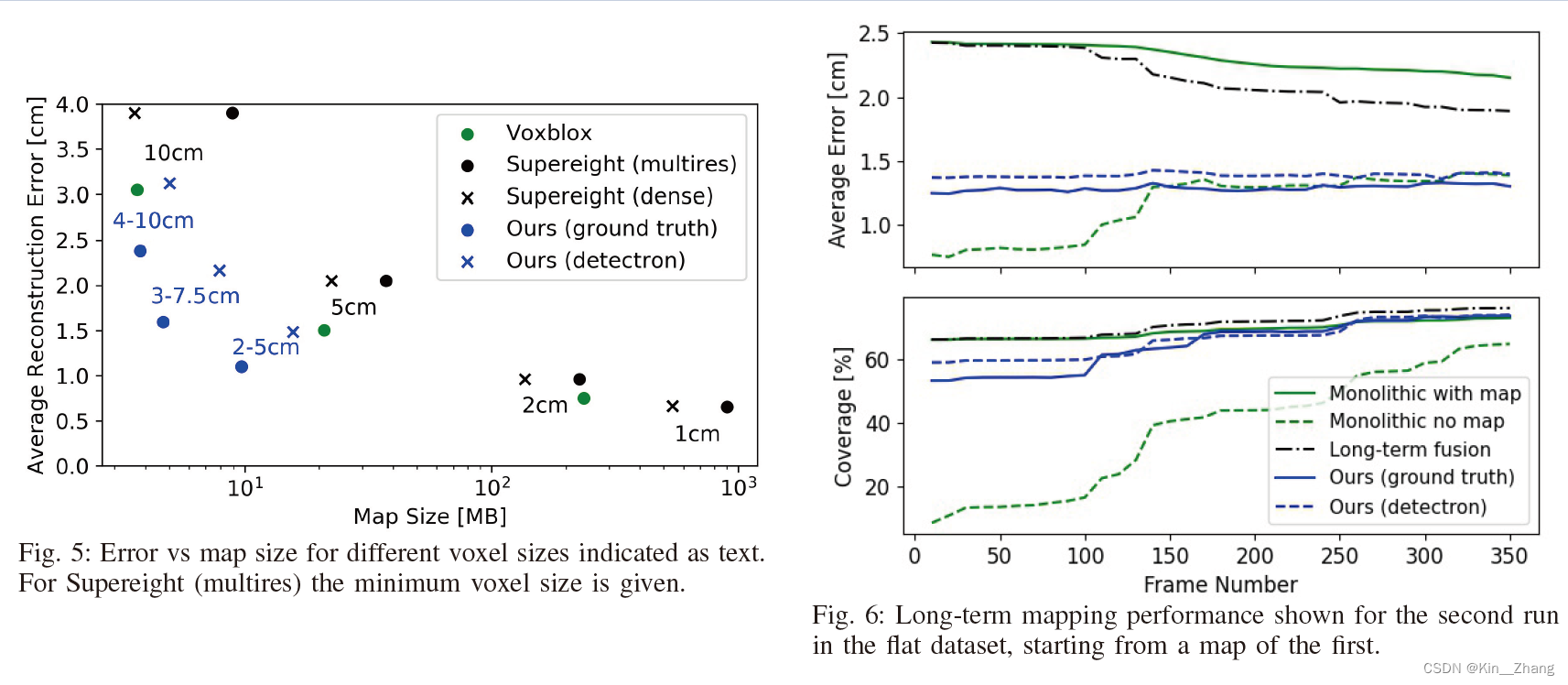
- monolithic map as in [3,8,9]
- Long-term fusion: [26] for volumetric maps (our implementation)
从图六折线图,可以看到一开始 Monolithic no map的误差还比较低,但会随时间而类似误差,其他with map和fusion等都会误差降低,由于semantic consistency的加入,我们的方法可以保持稳定误差范围内
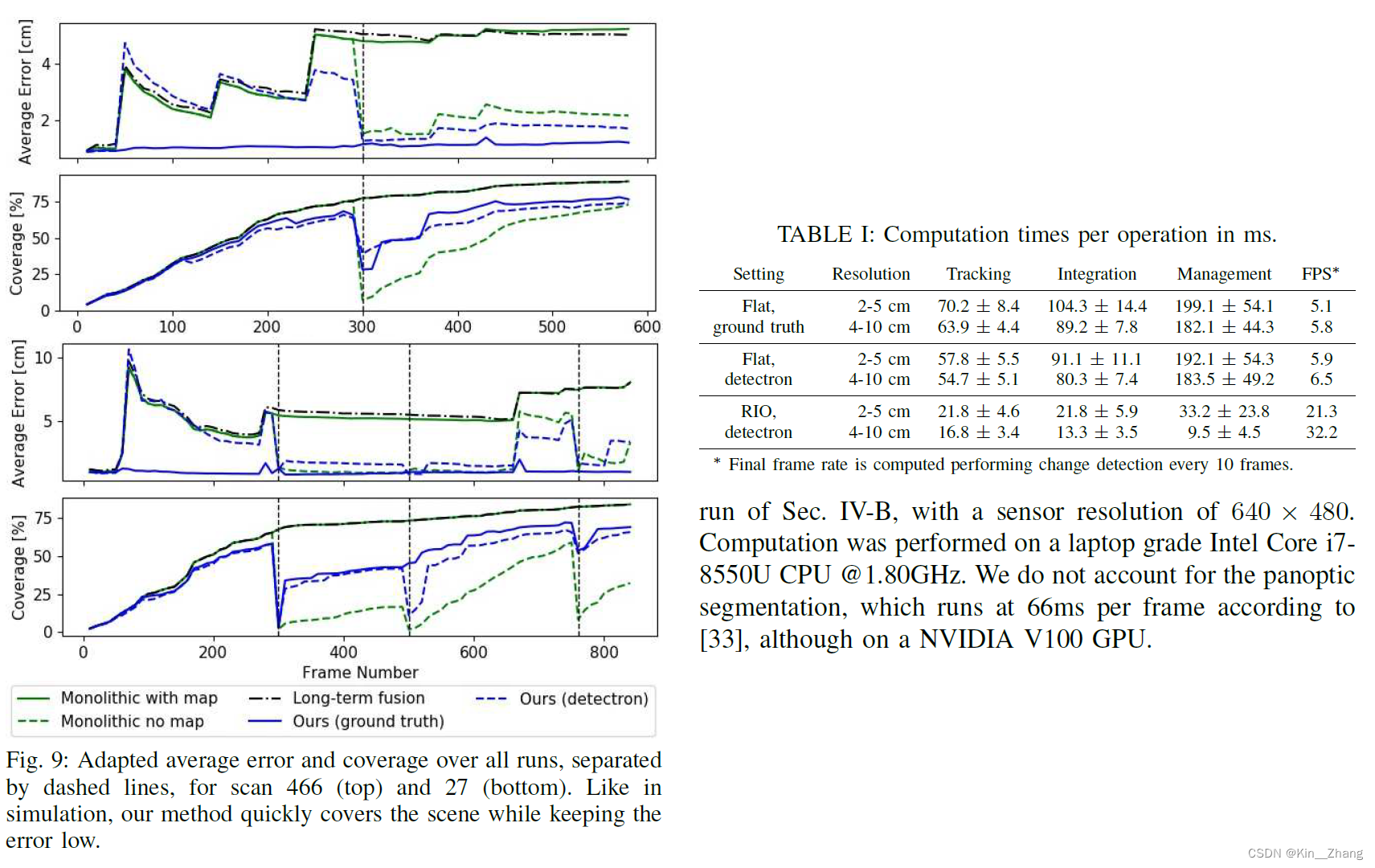
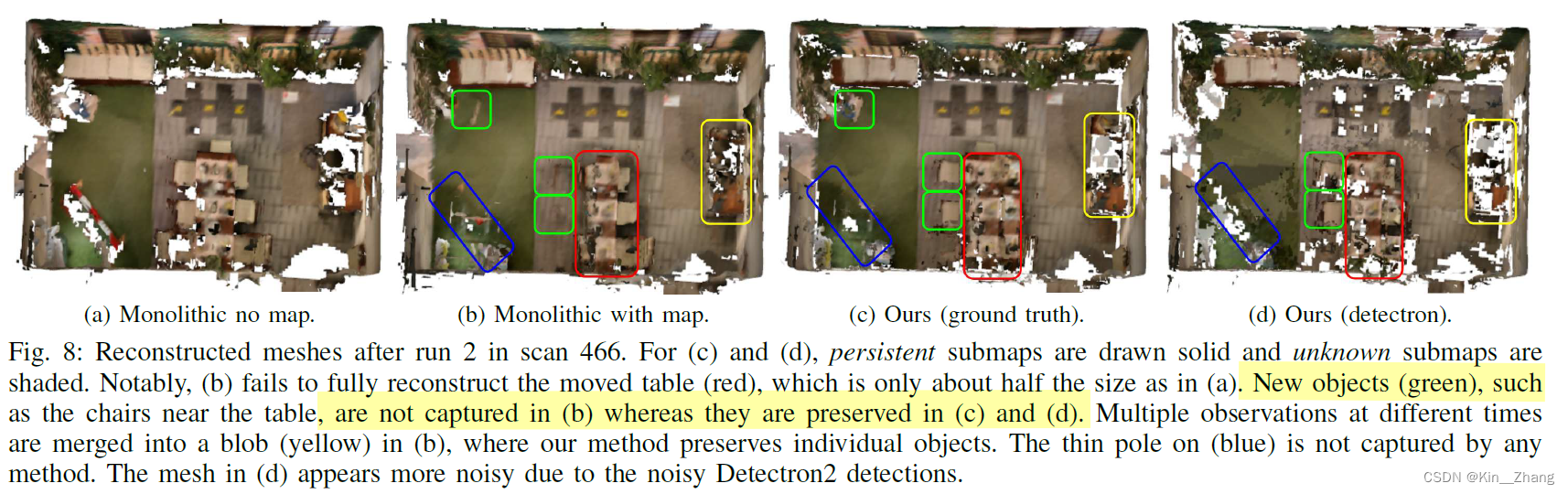
如上更多关于误差和计算时间的表格,下面为定性图:
4. Conclusion
主要是提出了全景的multi-TSDFs,是一种可以多分辨率volumetric mapping下新型的representation
我们提出的submap-based方法能实现 语义上在时间上的连续性,同样保证高分辨率的准确度
未来的工作可以在segmentation refinement 和 short-term dynamics,同时也可以 提升在变化环境下的重定位算法效果
碎碎念
第一次看mapping类,cpp代码真的是套娃(继承)起飞,感觉完全弄懂代码还需要点时间,不过大概就是以下几点:
- 得益于TSDFs 信息配合下一条,能有效降低map size
- 根据不同的物体进行不同的分辨率赋值
- 时间上 binary, count 概率,同时配合TSDF有权重更新,所以可以建出变化图形
- 一种 map 新型的表达方式
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
【论文阅读】ICRA2022: Panoptic Multi-TSDFs: a Flexible Representation for Online Multi-resolution Volumetric Mapping and Long-term Dynamic Scene Consistency的更多相关文章
- 【论文阅读】TextSnake: A Flexible Representation for Detecting Text of Arbitrary Shapes
TextSnake: A Flexible Representation for Detecting Text of Arbitrary Shapes ECCV2018 北京大学.face++ 思路: ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- 论文阅读笔记 - Mesos: A Platform for Fine-Grained ResourceSharing in the Data Center
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- 论文阅读笔记六:FCN:Fully Convolutional Networks for Semantic Segmentation(CVPR2015)
今天来看一看一个比较经典的语义分割网络,那就是FCN,全称如题,原英文论文网址:https://people.eecs.berkeley.edu/~jonlong/long_shelhamer_fcn ...
- 论文阅读笔记 Improved Word Representation Learning with Sememes
论文阅读笔记 Improved Word Representation Learning with Sememes 一句话概括本文工作 使用词汇资源--知网--来提升词嵌入的表征能力,并提出了三种基于 ...
- 论文阅读:Prominent Object Detection and Recognition: A Saliency-based Pipeline
论文阅读:Prominent Object Detection and Recognition: A Saliency-based Pipeline 如上图所示,本文旨在解决一个问题:给定一张图像, ...
随机推荐
- C#使用MX Component实现三菱PLC软元件数据采集的完整步骤(仿真)
前言 本文介绍了如何使用三菱提供的MX Component插件实现对三菱PLC软元件数据的读写,记录了使用计算机仿真,模拟PLC,直至完成测试的详细流程,并重点介绍了在这个过程中的易错点,供参考. 用 ...
- ansible系列(24)--ansible的loop循环语句
目录 1. loop循环语句 1.1 使用循环批量安装软件 1.2 使用循环批量启动服务 1.3 使用循环批量创建用户 1.4 使用循环批量拷贝文件 1. loop循环语句 在写 playbook 的 ...
- 海康威视web插件安装后,谷歌浏览器还是不能看视频问题
首先要根据弹出的信息提示,下载并安装视频播放插件, 安装完成后重新打开谷歌浏览器,重新登录系统,如果还是不能看视频,请按下面的方法设置: 步骤1:谷歌浏览器,地址栏中输入:chrome://flags ...
- addEventListener添加事件监听
removeEventListener移除事件监听 window.addEventListener('mousedown', e => this.closeMenu(e)) window.add ...
- jeecg-boot中分页接口用自定义sql和实体实现
1.controller实现 @RequestMapping(value = "/list", method = RequestMethod.GET) public Result& ...
- Spring 对于事务上的应用的详细说明
1. Spring 对于事务上的应用的详细说明 @ 目录 1. Spring 对于事务上的应用的详细说明 每博一文案 2. 事务概述 3. 引入事务场景 3.1 第一步:准备数据库表 3.2 第二步: ...
- Google出品的NotebookLM 人工智能笔记本,一款基于RAG的personalized AI产品
Google推出了实验性的NotebookLM产品,一款基于RAG的个性化AI助手产品,基于用户提供的可信信息,通过RAG,帮助用户洞察和学习参考内容,然后借助AI整理笔记,转换为用户最终需要的大纲. ...
- Github打不开解决办法(最新有效)
Github打不开解决办法(最新有效) 1. 先看没解决之前的截图: 2. 解决方法(手动修改DNS): 2.1 以win11为例,第一步:打开 设置 - 网络和Internet,找到 高级网络 ...
- vue我自己的动态菜单思路
1.在router里把所有的路由都加上. 2.后端存储路由path和其他设计需要的信息. 3.登录后,后端返回菜单树,根据权限不同,返回的菜单不同,并且还要返回每个path代表的页面具有的权限数组.可 ...
- 使用Docker安装Odoo 17(非Docker Compose)
使用Docker安装Odoo 17(非Docker Compose) 前言 最近在学习Odoo,先是windows 安装企业版,多年不用windows的服务器操作系统,一看windows的ECS那么贵 ...