nodelet的应用
1.创建一个包,如example_pkg
catkin_create_pkg example_pkg2.创建MyNodeletClass.h文件
cd ~/catkin_ws/src/example_pkg/
mkdir -p include/example_pkg
touch include/example_pkg/MyNodeletClass.h
vim include/example_pkg/MyNodeletClass.h
其内容为
#include <nodelet/nodelet.h>
namespace example_pkg
{
class MyNodeletClass : public nodelet::Nodelet
{
public:
virtual void onInit();
};
} 3.创建MyNodeletClass.cpp文件
cd ~/catkin_ws/src/example_pkg/
mkdir src
touch src/MyNodeletClass.cpp
vim src/MyNodeletClass.cpp
其内容为
// this should really be in the implementation (.cpp file)
#include <ros/ros.h>
#include <pluginlib/class_list_macros.h>
#include <example_pkg/MyNodeletClass.h> namespace example_pkg
{
void MyNodeletClass::onInit()
{
NODELET_DEBUG("Initializing nodelet...");
ROS_INFO("Nodelet is Ok for test!!");
}
} // watch the capitalization carefully
PLUGINLIB_DECLARE_CLASS(example_pkg, MyNodeletClass, example_pkg::MyNodeletClass, nodelet::Nodelet)
成功则输出"Nodelet is Ok for test!!"
4.创建nodelet_plugins.xml文件
cd ~/catkin_ws/src/example_pkg/
mkdir plugins
touch plugins/nodelet_plugins.xml
vim plugins/nodelet_plugins.xml
其内容为
<library path="lib/libexample_pkg">
<class name="example_pkg/MyNodeletClass" type="example_pkg::MyNodeletClass" base_class_type="nodelet::Nodelet">
<description>
This is my nodelet.
</description>
</class>
</library>5.修改package.xml文件,增加:
cd ~/catkin_ws/src/example_pkg/
vim package.xml
其内容为
<buildtool_depend>catkin</buildtool_depend>
<build_depend>nodelet</build_depend>
<build_depend>roscpp</build_depend>
<run_depend>nodelet</run_depend>
<run_depend>roscpp</run_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
<nodelet plugin="${prefix}/plugins/nodelet_plugins.xml" />
</export>
6.修改CMakeLists.txt
cd ~/catkin_ws/src/example_pkg
vim CMakeLists.txt
其内容为## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
include
${catkin_INCLUDE_DIRS}
${Boost_INCLUDE_DIRS}
)
## Declare a C++ library
add_library(${PROJECT_NAME} src/MyNodeletClass.cpp)
add_dependencies(${PROJECT_NAME}
${${PROJECT_NAME}_EXPORTED_TARGETS}
${catkin_EXPORTED_TARGETS}
)
target_link_libraries(${PROJECT_NAME}
${catkin_LIBRARIES}
)6.创建mynodelet.launch文件
d ~/catkin_ws/src/example_pkg/
mkdir launch
touch launch/mynodelet.launch
vim launch/mynodelet.launch
其内容为
<launch>
<node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager" output="screen"/>
<node pkg="nodelet" type="nodelet" name="MyNodeletClass" args="load example_pkg/MyNodeletClass standalone_nodelet" output="screen">
</node>
</launch>6.编译
cd ~/catkin_ws/
catkin_make
rospack profile7.运行
- 新终端,运行roscore
$ roscore
- 新终端,运行launch
$ rosluanch examples_pkg mynodelet.launch
参考:
http://www.ncnynl.com/archives/201702/1326.html
http://blog.csdn.net/zhangrelay/article/details/62048915
http://rosclub.cn/post-164.html
http://blog.csdn.net/yiranhaiziqi/article/details/53308657
http://www.lai18.com/content/2386868.html
例子
http://blog.csdn.net/zyh821351004/article/details/52143309
创建包nodelet_test,依赖项nodelet roscpp std_msgs

CMakeLists.txt
- cmake_minimum_required(VERSION 2.8.3)
- project(nodelet_test_pkg)
- find_package(catkin REQUIRED COMPONENTS nodelet roscpp std_msgs)#
- ## Setup include directories
- include_directories(${catkin_INCLUDE_DIRS})
- catkin_package(
- )
- add_library(nodelet_test plus.cpp)
- target_link_libraries(nodelet_test ${catkin_LIBRARIES})
package.xml
- <package>
- <name>nodelet_test_pkg</name>
- <version>0.0.0</version>
- <description>Nodelet test.</description>
- <maintainer email="huasheng_zyh@163.com">kint zhao</maintainer>
- <license>BSD</license>
- <buildtool_depend>catkin</buildtool_depend>
- <build_depend>nodelet</build_depend>
- <build_depend>roscpp</build_depend>
- <build_depend>std_msgs</build_depend>
- <run_depend>nodelet</run_depend>
- <run_depend>roscpp</run_depend>
- <run_depend>std_msgs</run_depend>
- <export>
- <nodelet plugin="${prefix}/nodelet_test_plugin.xml"/>
- </export>
- </package>
plugin
- <library path="lib/libnodelet_test_lib">
- <class name="nodelet_ns/Plus" type="nodelet_ns::Plus" base_class_type="nodelet::Nodelet">
- <description>
- A node to add a value and republish.
- </description>
- </class>
- </library>
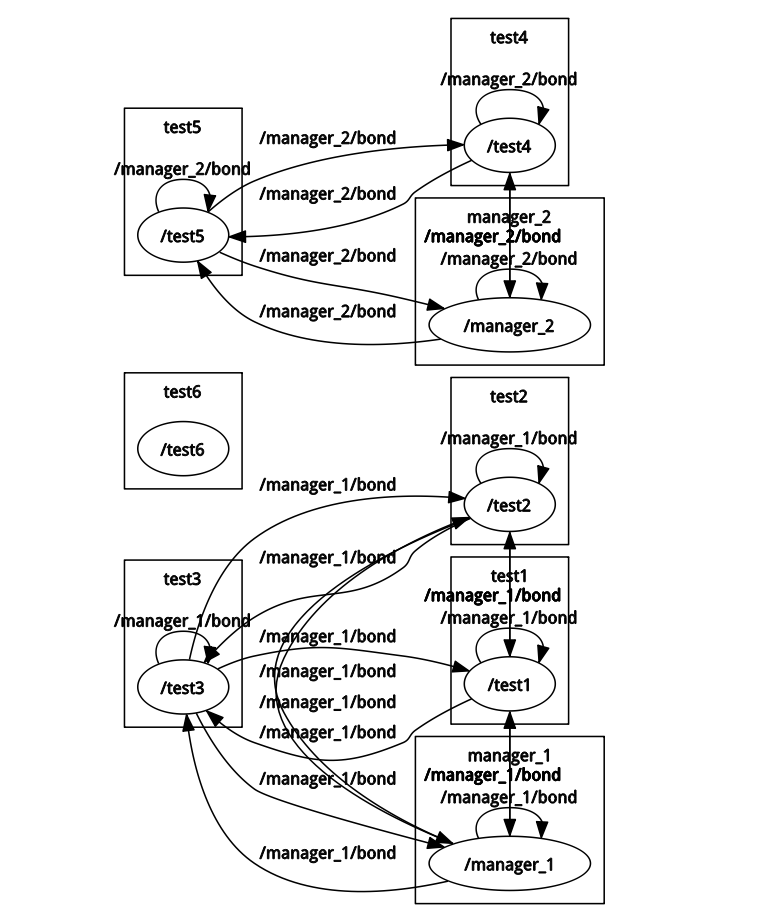
launch
- <launch>
- <node pkg="nodelet" type="nodelet" name="manager_1" args="manager" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test1" args="load nodelet_ns/Plus manager_1" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test2" args="load nodelet_ns/Plus manager_1" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test3" args="load nodelet_ns/Plus manager_1" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="manager_2" args="manager" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test4" args="load nodelet_ns/Plus manager_2" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test5" args="load nodelet_ns/Plus manager_2" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test6" args="standalone nodelet_ns/Plus " output="screen"/>
- </launch>
.cpp文件
- #include <pluginlib/class_list_macros.h>
- #include <nodelet/nodelet.h>
- #include <ros/ros.h>
- #include <std_msgs/Float64.h>
- #include <stdio.h>
- #include <math.h> //fabs
- namespace nodelet_ns
- {
- class Plus : public nodelet::Nodelet
- {
- public:
- Plus()
- : value_(0)
- {}
- private:
- virtual void onInit()
- {
- ros::NodeHandle& private_nh = getPrivateNodeHandle();
- private_nh.getParam("value", value_);
- pub = private_nh.advertise<std_msgs::Float64>("out", 10);
- sub = private_nh.subscribe("in", 10, &Plus::callback, this);
- }
- void callback(const std_msgs::Float64::ConstPtr& input)
- {
- std_msgs::Float64Ptr output(new std_msgs::Float64());
- output->data = input->data + value_;
- NODELET_DEBUG("Adding %f to get %f", value_, output->data);
- pub.publish(output);
- }
- ros::Publisher pub;
- ros::Subscriber sub;
- double value_;
- };
- PLUGINLIB_DECLARE_CLASS(nodelet_ns, Plus, nodelet_ns::Plus, nodelet::Nodelet);//*******
- }
nodelet的应用的更多相关文章
- ROS nodelet的使用
ROS是一种基于分布式网络通讯的操作系统,整个机器人控制系统是由一个Master主节点和若干个功能相对独立的Node子节点组成,这也是ROS系统最主要的特点就是分布式以及模块化的设计.在ROS通讯过程 ...
- ros nodelet 使用
ros nodelet能够加快高吞吐量程序运行速度比如点云 基本入门程序可以看 http://wiki.ros.org/nodelet/Tutorials/Porting%20nodes%20to%2 ...
- nodelet的理解
1.介绍 nodelet包可以为在相同进程中的多个算法之间实现零拷贝的传输方式. 这个包也提供了实现一个nodelet所需的nodelet基类以及用于实例化nodelet的NodeletLoader类 ...
- 第十九课 pluginlib&Nodelet
把rgb摄像头的数据转换为laser的时候使用了Nodelet. pluginlib(插件库) 在ros中有一个plugin的包,下面是一个ROS Plugin Registration的例子 上面包 ...
- ROS nodelet 理解记录
发现网上许多的例子都是基于官网的例子,还需要做进一步的说明. 1. NODELET_DEBUG 是无法打印的信息的,需要使用NODELET_INFO NODELET_DEBUG("Addin ...
- movebase导航
利用turtlebot 的导航配置文件 由于movbase发的速度太不友好了所以使用了ros自带的滤波安装相应的包 apt-get install ros-indigo-yocs-velocity-s ...
- 利用move_base导航--42
摘要: 原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/ 各位博友好长时间又没有写博客了,突然发现上班和在学校是不一样的,在公司的却没有时间写博客了,不过 ...
- PCL Nodelets 和 3D 点云---36
原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/ 1.首先确保你的kinect驱动或者uvc相机驱动能正常启动,如果你没有安装kinect深度相机驱动,请 ...
- ubuntu14.04 and ros indigo install kinect driver--16
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 今日多次测设ros indigo install kinect driver ,提示各种失败,然 ...
随机推荐
- Maven build标签
前言: <build >设置,主要用于编译设置 1.分类 在Maven的pom.xml文件中,存在如下两种<build>: (1)全局配置(project build) 针对整 ...
- find 使用指南
find 使用方法整理 -name 按照文件名查找文件. -perm 按照文件权限来查找文件. -user 按照文件属主来查找文件. -group 按照文件所属的组来查找文件. - n表示文件 ...
- Windows10 官方原版镜像下载途径 Label:win10解决方案
https://www.microsoft.com/en-gb/software-download/windows10ISO 设置浏览标签为手机以避免跳转,下载即可 或者手机打开该网址,获取下载链接 ...
- oracle导入数据和编码问题
配置contrl文件 load data characterset utf8 append into table role_res_gold fields terminated by ';' TRAI ...
- call()和apply()的认知
apply:方法能劫持另外一个对象的方法,继承另外一个对象的属性. Function.apply(obj,args)方法能接收两个参数 obj:这个对象将代替Function类里this对象 arg ...
- Mysql提权
获取最高用户root的密码 获取方式:数据库配置文件.端口破解口令.下载数据库文件获取等1.数据库配置文件config,conn,data,sql,include,common,inc等命名文件2.数 ...
- Python Twisted系列教程4:由Twisted支持的诗歌客户端
作者:dave@http://krondo.com/twisted-poetry/ 译者:杨晓伟(采用意译) 你可以在这里从头开始阅读这个系列. 第一个twisted支持的诗歌服务器 尽管Twist ...
- Python之select模块解析
首先列一下,sellect.poll.epoll三者的区别 select select最早于1983年出现在4.2BSD中,它通过一个select()系统调用来监视多个文件描述符的数组,当select ...
- Python时间日期函数讲解
所有日期.时间的api都在datetime模块内. 1. 日期输出格式化 datetime => string import datetime now = datetime.datetime.n ...
- Maven Assembly打包提示[WARNING] transitive dependencies if any will not be available
maven assembly打包出现错误 [WARNING] The POM for com.flink.xxr:0.0.1-SNAPSHOT is invalid, transitive depen ...