AStar寻路算法示例
概述
AStar算法是一种图形搜索算法,常用于寻路。他是以广度优先搜索为基础,集Dijkstra算法和最佳优先(best fit)于一身的一种算法。
示例1:4向

示例2:8向

思路
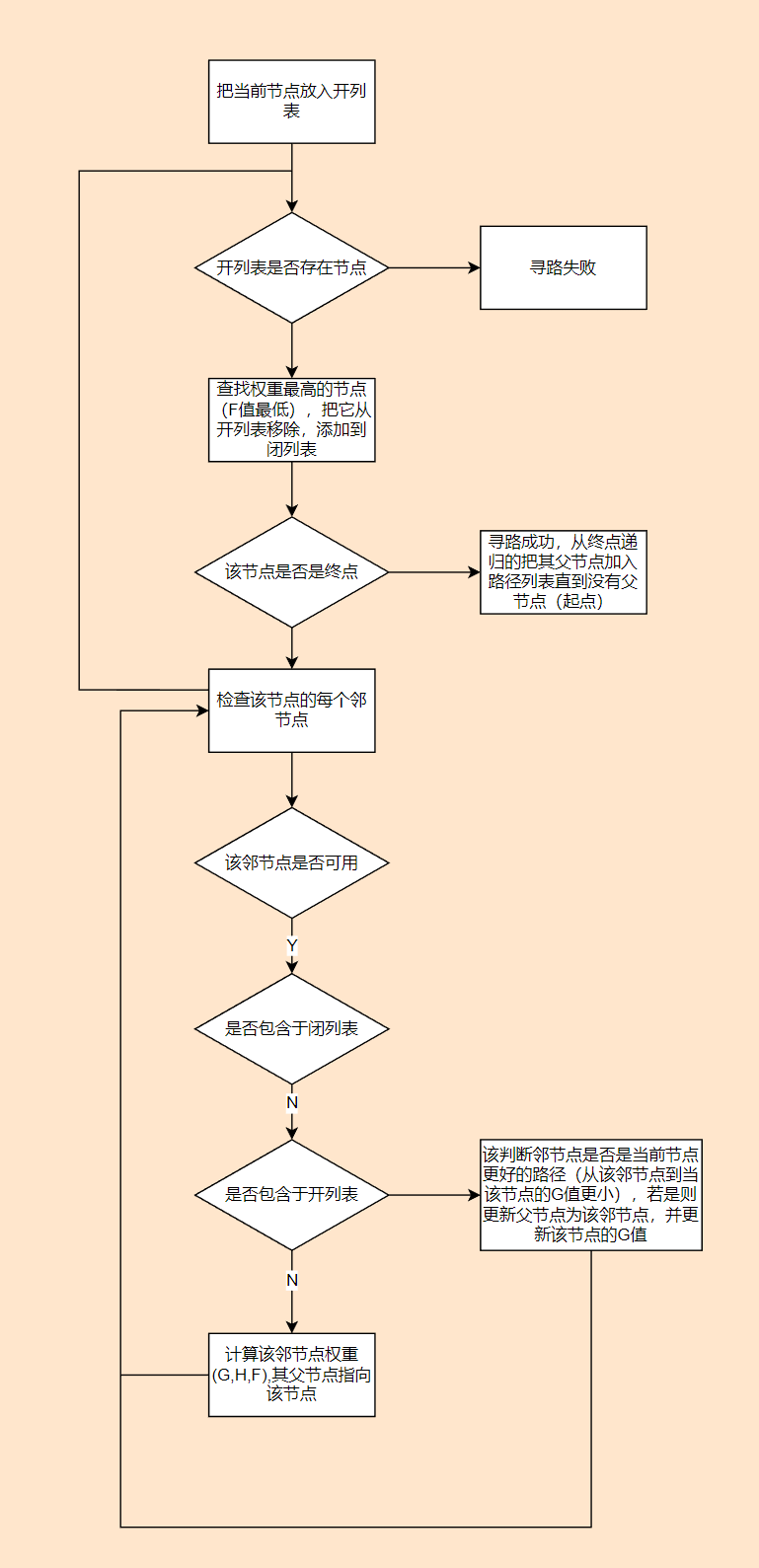
递归的通过估值函数找到最佳路径,估值函数与距离相关,也有可能与通过代价系数相关(例如平地系数为1,坡地系数为2),有三个参数:
- G:起点点到当前点的代价
- H: 当前点到终点的代价
- F: F = G + H 与最佳路径权重负相关的参数
代码示例
位置定义
public struct Vec2
{
public int x;
public int y;
public Vec2(int x, int y)
{
this.x = x;
this.y = y;
}
public static Vec2 Zero
{
get
{
return new Vec2(0, 0);
}
}
public override bool Equals(object obj)
{
if (!(obj is Vec2))
return false;
var o = (Vec2)obj;
return x == o.x && y == o.y;
}
public override int GetHashCode()
{
return x.GetHashCode() + y.GetHashCode();
}
public static Vec2 operator +(Vec2 a, Vec2 b)
{
return new Vec2(a.x + b.x, a.y + b.y);
}
public static Vec2 operator *(Vec2 a, int n)
{
return new Vec2(a.x * n, a.y * n);
}
public static Vec2 operator *(int n, Vec2 a)
{
return new Vec2(a.x * n, a.y * n);
}
public static bool operator ==(Vec2 a, Vec2 b)
{
return a.x == b.x && a.y == b.y;
}
public static bool operator !=(Vec2 a, Vec2 b)
{
return !(a.x == b.x && a.y == b.y);
}
}
方向定义
public enum EDir
{
Up = 0,
Down = 1,
Left = 2,
Right = 3,
UpLeft = 4,
UpRight = 5,
DownLeft = 6,
DownRight = 7,
}
public abstract class CheckDirPol
{
abstract public Dictionary<EDir, Vec2> GetDir();
}
public class CheckDir4Pol : CheckDirPol
{
private Dictionary<EDir, Vec2> dirDict = new Dictionary<EDir, Vec2>
{
{EDir.Up, new Vec2(0, 1) },
{EDir.Down, new Vec2(0, -1) },
{EDir.Left, new Vec2(-1, 0) },
{EDir.Right, new Vec2(1, 0) },
};
override public Dictionary<EDir, Vec2> GetDir()
{
return dirDict;
}
}
public class CheckDir8Pol : CheckDirPol
{
private Dictionary<EDir, Vec2> dirDict = new Dictionary<EDir, Vec2>
{
{EDir.Up, new Vec2(0, 1) },
{EDir.Down, new Vec2(0, -1) },
{EDir.Left, new Vec2(-1, 0) },
{EDir.Right, new Vec2(1, 0) },
{EDir.UpLeft, new Vec2(-1, 1) },
{EDir.UpRight, new Vec2(1, 1) },
{EDir.DownLeft, new Vec2(-1, -1) },
{EDir.DownRight, new Vec2(1, -1) },
};
override public Dictionary<EDir, Vec2> GetDir()
{
return dirDict;
}
}
- 运用策略模式的技巧,以实现4向,8向搜索切换
估值函数
public abstract class EvaPol
{
abstract public float Calc(Vec2 a, Vec2 b);
}
public class MANEvaPol : EvaPol
{
override public float Calc(Vec2 a, Vec2 b)
{
return Mathf.Abs(a.x - b.x) + Mathf.Abs(a.y - b.y);
}
}
- 直接使用曼哈顿距离作为代价
节点定义
public class Node
{
public int id;
public Vec2 pos;
public float g;
public float h;
public float f;
public Vec2 prePos;
public bool hasPrePos;
public Node(Vec2 pos)
{
this.pos = pos;
}
public void SetPrePos(Vec2 pos)
{
prePos = pos;
hasPrePos = true;
}
}
算法上下文定义
Context context;
EvaPol disPol;
CheckDirPol checkDirPol;
public struct Context
{
public Vec2 end;
public Vec2 start;
public Node[,] nodes;
public List<Node> open;
public List<Node> close;
public int[,] map;
public List<Vec2> result;
public Vec2 size;
}
寻路算法
初始化
public void Init(Vec2 start, Vec2 end, int[,] map)
{
var x = map.GetLength(0);
var y = map.GetLength(1);
context = new Context()
{
start = start,
end = end,
open = new List<Node>(),
close = new List<Node>(),
map = map,
result = new List<Vec2>(),
size = new Vec2(x, y),
};
context.nodes = new Node[x, y];
for (int i = 0; i < x; i++)
for (int j = 0; j < x; j++)
context.nodes[i, j] = new Node(new Vec2(i, j));
disPol = new MANEvaPol();
//checkDirPol = new CheckDir4Pol();
checkDirPol = new CheckDir8Pol();
}
获取路径
public List<Vec2> GetResult()
{
return context.result;
}
寻路
寻路入口
public void FindPath()
{
var s = context.start;
var sn = context.nodes[s.x, s.y];
sn.g = 0;
sn.h = disPol.Calc(s, context.end);
sn.f = sn.g + sn.h;
context.open.Add(sn);
FindArrangement(sn);
}
递归函数
void FindArrangement(Node node)
{
context.close.Add(node);
context.open.Remove(node);
if (node.pos == context.end)
{
SetResult(node);
return;
}
CheckRound(node);
if (context.open.Count == 0)
return;
Node next = context.open[0];
for (int i = 1; i < context.open.Count; i++)
if (context.open[i].f < next.f)
next = context.open[i];
FindArrangement(next);
}
检查周围节点
void CheckRound(Node node)
{
var dirDict = checkDirPol.GetDir();
foreach (var pair in dirDict)
{
var dir = node.pos + pair.Value;
if (IsBlock(dir))
continue;
var dn = context.nodes[dir.x, dir.y];
if (context.close.Contains(dn))
continue;
if (context.open.Contains(dn))
TryOverridePath(node, dn);
else
{
dn.g = disPol.Calc(dn.pos, context.start);
dn.h = disPol.Calc(dn.pos, context.end);
dn.f = dn.g + dn.h;
dn.SetPrePos(node.pos);
context.open.Add(dn);
}
}
}
// 若是从邻节点到该节点路径更优,则替换更新
void TryOverridePath(Node a, Node b)
{
var g = a.g + disPol.Calc(a.pos, b.pos);
if (g < b.g)
{
b.g = g;
b.SetPrePos(a.pos);
}
}
bool IsBlock(Vec2 pos)
{
return !InMap(pos) || context.map[pos.x, pos.y] == 1;
}
bool InMap(Vec2 pos)
{
var x = pos.x;
var y = pos.y;
var size = context.size;
return x >= 0 && x < size.x && y >= 0 && y < size.y;
}
生成路径
void SetResult(Node node)
{
Queue<Node> q = new Queue<Node>();
while(node.hasPrePos)
{
q.Enqueue(node);
node = context.nodes[node.prePos.x, node.prePos.y];
}
while(q.Count > 0)
{
context.result.Add(q.Dequeue().pos);
}
}
完整代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public struct Vec2
{
public int x;
public int y;
public Vec2(int x, int y)
{
this.x = x;
this.y = y;
}
public static Vec2 Zero
{
get
{
return new Vec2(0, 0);
}
}
public override bool Equals(object obj)
{
if (!(obj is Vec2))
return false;
var o = (Vec2)obj;
return x == o.x && y == o.y;
}
public override int GetHashCode()
{
return x.GetHashCode() + y.GetHashCode();
}
public static Vec2 operator +(Vec2 a, Vec2 b)
{
return new Vec2(a.x + b.x, a.y + b.y);
}
public static Vec2 operator *(Vec2 a, int n)
{
return new Vec2(a.x * n, a.y * n);
}
public static Vec2 operator *(int n, Vec2 a)
{
return new Vec2(a.x * n, a.y * n);
}
public static bool operator ==(Vec2 a, Vec2 b)
{
return a.x == b.x && a.y == b.y;
}
public static bool operator !=(Vec2 a, Vec2 b)
{
return !(a.x == b.x && a.y == b.y);
}
}
public enum EDir
{
Up = 0,
Down = 1,
Left = 2,
Right = 3,
UpLeft = 4,
UpRight = 5,
DownLeft = 6,
DownRight = 7,
}
public class AstarFindPath
{
public class Node
{
public int id;
public Vec2 pos;
public float g;
public float h;
public float f;
public Vec2 prePos;
public bool hasPrePos;
public Node(Vec2 pos)
{
this.pos = pos;
}
public void SetPrePos(Vec2 pos)
{
prePos = pos;
hasPrePos = true;
}
}
public abstract class EvaPol
{
abstract public float Calc(Vec2 a, Vec2 b);
}
public class MANEvaPol : EvaPol
{
override public float Calc(Vec2 a, Vec2 b)
{
return Mathf.Abs(a.x - b.x) + Mathf.Abs(a.y - b.y);
}
}
public abstract class CheckDirPol
{
abstract public Dictionary<EDir, Vec2> GetDir();
}
public class CheckDir4Pol : CheckDirPol
{
private Dictionary<EDir, Vec2> dirDict = new Dictionary<EDir, Vec2>
{
{EDir.Up, new Vec2(0, 1) },
{EDir.Down, new Vec2(0, -1) },
{EDir.Left, new Vec2(-1, 0) },
{EDir.Right, new Vec2(1, 0) },
};
override public Dictionary<EDir, Vec2> GetDir()
{
return dirDict;
}
}
public class CheckDir8Pol : CheckDirPol
{
private Dictionary<EDir, Vec2> dirDict = new Dictionary<EDir, Vec2>
{
{EDir.Up, new Vec2(0, 1) },
{EDir.Down, new Vec2(0, -1) },
{EDir.Left, new Vec2(-1, 0) },
{EDir.Right, new Vec2(1, 0) },
{EDir.UpLeft, new Vec2(-1, 1) },
{EDir.UpRight, new Vec2(1, 1) },
{EDir.DownLeft, new Vec2(-1, -1) },
{EDir.DownRight, new Vec2(1, -1) },
};
override public Dictionary<EDir, Vec2> GetDir()
{
return dirDict;
}
}
public struct Context
{
public Vec2 end;
public Vec2 start;
public Node[,] nodes;
public List<Node> open;
public List<Node> close;
public int[,] map;
public List<Vec2> result;
public Vec2 size;
}
Context context;
EvaPol disPol;
CheckDirPol checkDirPol;
public void Init(Vec2 start, Vec2 end, int[,] map)
{
var x = map.GetLength(0);
var y = map.GetLength(1);
context = new Context()
{
start = start,
end = end,
open = new List<Node>(),
close = new List<Node>(),
map = map,
result = new List<Vec2>(),
size = new Vec2(x, y),
};
context.nodes = new Node[x, y];
for (int i = 0; i < x; i++)
for (int j = 0; j < x; j++)
context.nodes[i, j] = new Node(new Vec2(i, j));
disPol = new MANEvaPol();
//checkDirPol = new CheckDir4Pol();
checkDirPol = new CheckDir8Pol();
}
public void FindPath()
{
var s = context.start;
var sn = context.nodes[s.x, s.y];
sn.g = 0;
sn.h = disPol.Calc(s, context.end);
sn.f = sn.g + sn.h;
context.open.Add(sn);
FindArrangement(sn);
}
public List<Vec2> GetResult()
{
return context.result;
}
void FindArrangement(Node node)
{
context.close.Add(node);
context.open.Remove(node);
if (node.pos == context.end)
{
SetResult(node);
return;
}
CheckRound(node);
if (context.open.Count == 0)
return;
Node next = context.open[0];
for (int i = 1; i < context.open.Count; i++)
if (context.open[i].f < next.f)
next = context.open[i];
FindArrangement(next);
}
void SetResult(Node node)
{
Queue<Node> q = new Queue<Node>();
while(node.hasPrePos)
{
q.Enqueue(node);
node = context.nodes[node.prePos.x, node.prePos.y];
}
while(q.Count > 0)
{
context.result.Add(q.Dequeue().pos);
}
}
void CheckRound(Node node)
{
var dirDict = checkDirPol.GetDir();
foreach (var pair in dirDict)
{
var dir = node.pos + pair.Value;
if (IsBlock(dir))
continue;
var dn = context.nodes[dir.x, dir.y];
if (context.close.Contains(dn))
continue;
if (context.open.Contains(dn))
TryOverridePath(node, dn);
else
{
dn.g = disPol.Calc(dn.pos, context.start);
dn.h = disPol.Calc(dn.pos, context.end);
dn.f = dn.g + dn.h;
dn.SetPrePos(node.pos);
context.open.Add(dn);
}
}
}
void TryOverridePath(Node a, Node b)
{
var g = a.g + disPol.Calc(a.pos, b.pos);
if (g < b.g)
{
b.g = g;
b.SetPrePos(a.pos);
}
}
bool IsBlock(Vec2 pos)
{
return !InMap(pos) || context.map[pos.x, pos.y] == 1;
}
bool InMap(Vec2 pos)
{
var x = pos.x;
var y = pos.y;
var size = context.size;
return x >= 0 && x < size.x && y >= 0 && y < size.y;
}
}
AStar寻路算法示例的更多相关文章
- 算法:Astar寻路算法改进,双向A*寻路算法
早前写了一篇关于A*算法的文章:<算法:Astar寻路算法改进> 最近在写个js的UI框架,顺便实现了一个js版本的A*算法,与之前不同的是,该A*算法是个双向A*. 双向A*有什么好处呢 ...
- C#实现AStar寻路算法
AStar寻路算法是一种在一个静态路网中寻找最短路径的算法,也是在游戏开发中最常用到的寻路算法之一:最近刚好需要用到寻路算法,因此把自己的实现过程记录下来. 先直接上可视化之后的效果图,图中黑色方格代 ...
- 算法:Astar寻路算法改进
早前写了一篇<RCP:gef智能寻路算法(A star)> 出现了一点问题. 在AStar算法中,默认寻路起点和终点都是N x N的方格,但如果用在路由上,就会出现问题. 如果,需要连线的 ...
- 一个高效的A-star寻路算法(八方向)(
这种写法比较垃圾,表现在每次搜索一个点要遍历整个地图那么大的数组,如果地图为256*256,每次搜索都要执行65535次,如果遍历多个点就是n*65535,速度上实在是太垃圾了 简单说下思路,以后补充 ...
- javascript 实现 A-star 寻路算法
在游戏开发中,又一个很常见的需求,就是让一角色从A点走到B点,而我们期望所走的路是最短的,最容易想到的就是两点之间直线最短,我们可以通过勾股定理来求出两点之间的距离,但这个情况只能用于两点之间没有障碍 ...
- 对A-Star寻路算法的粗略研究
首先来看看完成后的效果: 其中灰色代表路障,绿色是起点和移动路径,红色代表终点 // = openArray[i+1].F) { minNode = openArray[i+1]; } } sta ...
- javascript的Astar版 寻路算法
去年做一个模仿保卫萝卜的塔防游戏的时候,自己写的,游戏框架用的是coco2d-html5 实现原理可以参考 http://www.cnblogs.com/technology/archive/2011 ...
- A*寻路算法的探寻与改良(三)
A*寻路算法的探寻与改良(三) by:田宇轩 第三分:这部分内容基于树.查找算法等对A*算法的执行效率进行了改良,想了解细 ...
- A星寻路算法入门(Unity实现)
最近简单学习了一下A星寻路算法,来记录一下.还是个萌新,如果写的不好,请谅解.Unity版本:2018.3.2f1 A星寻路算法是什么 游戏开发中往往有这样的需求,让玩家控制的角色自动寻路到目标地点, ...
- [转] A*寻路算法C++简单实现
参考文章: http://www.policyalmanac.org/games/aStarTutorial.htm 这是英文原文<A*入门>,最经典的讲解,有demo演示 http: ...
随机推荐
- 驱动开发:通过Async反向与内核通信
在前几篇文章中给大家具体解释了驱动与应用层之间正向通信的一些经典案例,本章将继续学习驱动通信,不过这次我们学习的是通过运用Async异步模式实现的反向通信,反向通信机制在开发中时常被用到,例如一个杀毒 ...
- H3C交换机配置DHCP服务器
dhcp server ip-pool vlan4020 network 10.3.7.0 mask 255.255.255.0 gateway-list 10.3.7.254 dns-list 20 ...
- Tableau Server注册安装及配置详细教程
Tableau Server注册安装及配置详细教程 本文讲解的是 Tableau Server 10.0 版本的安装及配置 这里分享的 TableauServer 安装版本为64位的10.0版本Ser ...
- python2与python区别汇总
目录 输入与输出 range使用区别 字符编码区别 输入与输出 python2与python3中两个关键字的区别 python2中 input方法需要用户自己提前指定数据类型 写什么类型就是什么类型 ...
- Java中的名称命名规范
包名:多单词组成时所有字母都小写:xxxyyyzzz 类名.接口名:多单词组成时,所有单词的首字母大写:XxxYyyZzz 变量名.方法名:多单词组成时,第一个单词首字母小写,第二个单词开始每个单词首 ...
- 给 hugo 博客添加搜索功能
起因 我的博客使用了 hugo 作为静态生成工具,自带的主题里也没有附带搜索功能.看来,还是得自己给博客添加一个搜索功能. 经过多方查找,从 Hugo Fast Search · GitHub 找到一 ...
- 都卷Java,你看看你得学多少技术栈才能工作!
作者:小傅哥 博客:https://bugstack.cn 沉淀.分享.成长,让自己和他人都能有所收获! 一.前言:授业解惑 我知道,你不知道的还有很多! 你了解计算机要从哪里开始学习吗?你清楚为了能 ...
- 1.pygame快速入门-创建游戏窗口
简介 pygame是python一个包,专为电子游戏设计#安装 pip3 install pygame #验证安装 # aliens 是pygame内置的一个小游戏,可以启动成功说明pygame安 ...
- 18.drf request及源码分析
REST framework的 Request 类扩展了Django标准的 HttpRequest ,添加了对REST framework请求解析和身份验证的支持. 源代码片段: class Requ ...
- 栈溢出漏洞利用流程——以syncbrs为例
0x1 缓冲区溢出漏洞攻击简介 缓冲区溢出攻击是针对程序设计缺陷,向程序输入缓冲区写入使之溢出的内容(通常是超过缓冲区能保存的最大数据量的数据),从而破坏程序的堆栈,使程序转而执行其他指令,以达到攻击 ...