CodeSys中编程实现串口通讯
第一步:Linux中启用串口设备。【以树莓派4B为例】
树莓派4B有6个串口,参考上一篇《》,在 /boot/config.txt 中添加一行,开启 uart2 功能:
dtoverlay=uart2重启后,查看是否有多出来一个 /dev/AMA1 设备:
$ ls -l /dev/tty*
crw-rw---- 1 root dialout 204, 64 Jul 20 11:52 /dev/ttyAMA0
crw-rw---- 1 root dialout 204, 65 Jul 20 11:59 /dev/ttyAMA1
crw------- 1 root root 5, 3 Jul 20 11:52 /dev/ttyprintk
crw--w---- 1 root tty 4, 64 Jul 20 11:52 /dev/ttyS0也可以config.txt 中添加多行(uart2,uart3,uart4,uart5)启动多个串口功能 (对应 ttyAMA1,ttyAMA2,ttyAMA3 和 ttyAMA4).
可以用下面命令查看 uart2 对应的GPIO针脚映射:
# dtoverlay -h uart2
Name: uart2
Info: Enable uart 2 on GPIOs 0-3. BCM2711 only.
Usage: dtoverlay=uart2,<param>
Params: ctsrts Enable CTS/RTS on GPIOs 2-3 (default off)从输出可见,GPIO针脚为0-3, 其中针脚0和1分别为TxD和RxD,针脚2-3为流控 CTS/RTS. 此处针脚0-1为BCM编码号,物理引脚号为27-28.
第二步: 使用python代码,测试 uart2 功能是否正确
硬件接线: 将 GPIO引脚0 和 1 短接,实现自发自收。
软件测试:python控制台中,执行如下代码测试
>>> import serial
>>> ted = serial.Serial(port="/dev/ttyAMA1", baudrate=9600)
>>> ted.write("Hello World".encode("gbk"))
11
>>> ted.read(11)
b'Hello World'
>>>能收到字串‘Hello World’表示 uart2 功能和接线均一切正常。
第三步:编辑 CodeSys 配置文件,映射 /dev/ttyAMA* 到 COMx 端口号。
在老版本的CodeSys 中,需要编辑 "/ect/CODESYSControl.cfg" 末尾添加:
[SysCom]
Linux.Devicefile = /dev/ttyUSB
portnum := COM.SysCom.SYS_COMPORT1;这样,在codesys中指定串口号1,代表使用的设备为 /dev/ttyUSB0, 非常不直观。
从codesys v3.5 SP15 起(据说),改为在文件 /etc/CODESYSControl_User.cfg 里这么设置:
[SysCom]
Linux.Devicefile.1=/dev/ttyS0
Linux.Devicefile.2=/dev/ttyAMA1
Linux.Devicefile.4=/dev/ttyUSB0这样, Com1 即为 ttyS0, Com2即为 ttyAMA1, Com4 即为 ttyUSB0,依次类推。支持多个串口,方便多了。
如上面设置,映射关系 uart2 --> ttyAMA1 ---> Com2, 所以codesys中指定端口号为 2 (即Com2)即可。
第四步: CodeSys中编程实现串口收发功能
参考 youtube 上的学习视频: https://www.youtube.com/watch?v=NFREG2U07Rg
只需参考codesys编程部分即可,代码我在他基础上又做了修改完善,
(1)程序块导入3个库: Memory, Serial Communication, Util
(2)定义部分:
PROGRAM SerialPort
VAR
(*打开端口部分*)
Open_0: COM.Open;
Open_xExecute: BOOL := TRUE; //默认打开端口
aParams : ARRAY [1..7] OF COM.PARAMETER := [
(udiParameterId := COM.CAA_Parameter_Constants.udiPort, udiValue := 2),
(udiParameterId := COM.CAA_Parameter_Constants.udiBaudrate, udiValue := 9600),
(udiParameterId := COM.CAA_Parameter_Constants.udiParity, udiValue := INT_TO_UDINT(COM.PARITY.NONE) ),
(udiParameterId := COM.CAA_Parameter_Constants.udiStopBits, udiValue := INT_TO_UDINT(COM.STOPBIT.ONESTOPBIT) ),
(udiParameterId := COM.CAA_Parameter_Constants.udiTimeout, udiValue := 0),
(udiParameterId := COM.CAA_Parameter_Constants.udiByteSize, udiValue := 8),
(udiParameterId := COM.CAA_Parameter_Constants.udiBinary, udiValue := 0)
];
hCom: CAA.HANDLE;
(* read模块 *)
BLINK0: BLINK;
Read_0: COM.Read;
bReadData : ARRAY[1..80] OF BYTE;
read_szSize: CAA.SIZE;
sReadData : STRING;
(* write模块 *)
Write_0: COM.Write;
write_xExecute: BOOL; //执行write操作
bWriteData : ARRAY[1..80] OF BYTE;
sWriteData : STRING;
sWriteDataLast : STRING; //上一次 Write值
END_VAR(3)梯形图部分
先要 打开串口 (串口参数在定义部分已预设定):
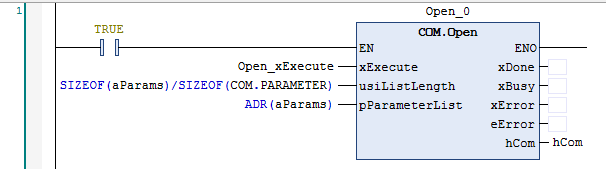
注意此处,参数 xExecute 需始终为 True,否则 会关闭串口 hCom=0 !
读串口部分的代码:

使用 blink 定期读取,读出的内容放到数组 bReadData 中,读出长度为 read_szSize.
为了防止读入空(读出为空是常态,有内容 是少数)时 覆盖掉前面值,非空时才拷贝和更新到某个string,代码如下:

这样,仅在有新内容读出时,才更新值到 sReadData 中。末尾的 MEM.MemFill() 用于写入 string 的结束字符 '\0' .
下面到了 写串口 的部分。基本思路也是差不多,字符串中有新值时,才将 字符串内容 拷贝到 数组中用于写出,并使能一次写动作,代码如下:

之后开始真正的 串口写 动作:

代码后半行,如果写成功,就把此次内容保存到 sWriteDataLast 字串里,用于下一次比较,内容不同时才触发一次 COM.Write() 写动作。
需要注意的是,若写动作发生error,会一直卡住 不更新 sWriteDataLast,所以加上并联条件 Write_0.xError , 不管成功/Error失败 均结束此次写动作!就算写失败,想再一次尝试,也必须将 sWriteData 改为其他才能再次触发 写动作。
(4)CodeSys中测试串口读写功能
若串口正确打开, 则 hCom 的值非空,否则 hCom=0 表示失败。
blink产生的信号定时读一遍数据,有新内容显示在字串 sReadData 中;
字串 sWriteData 中的内容会通过串口写出去,只有更新 sWriteData 值的瞬间才会触发一次写操作,不管是否写出成功。
以上代码,使用 树莓派4B, Codesys 3.5.18.2 ,Codesys Control for Linux ARM64 SL 测试通过。
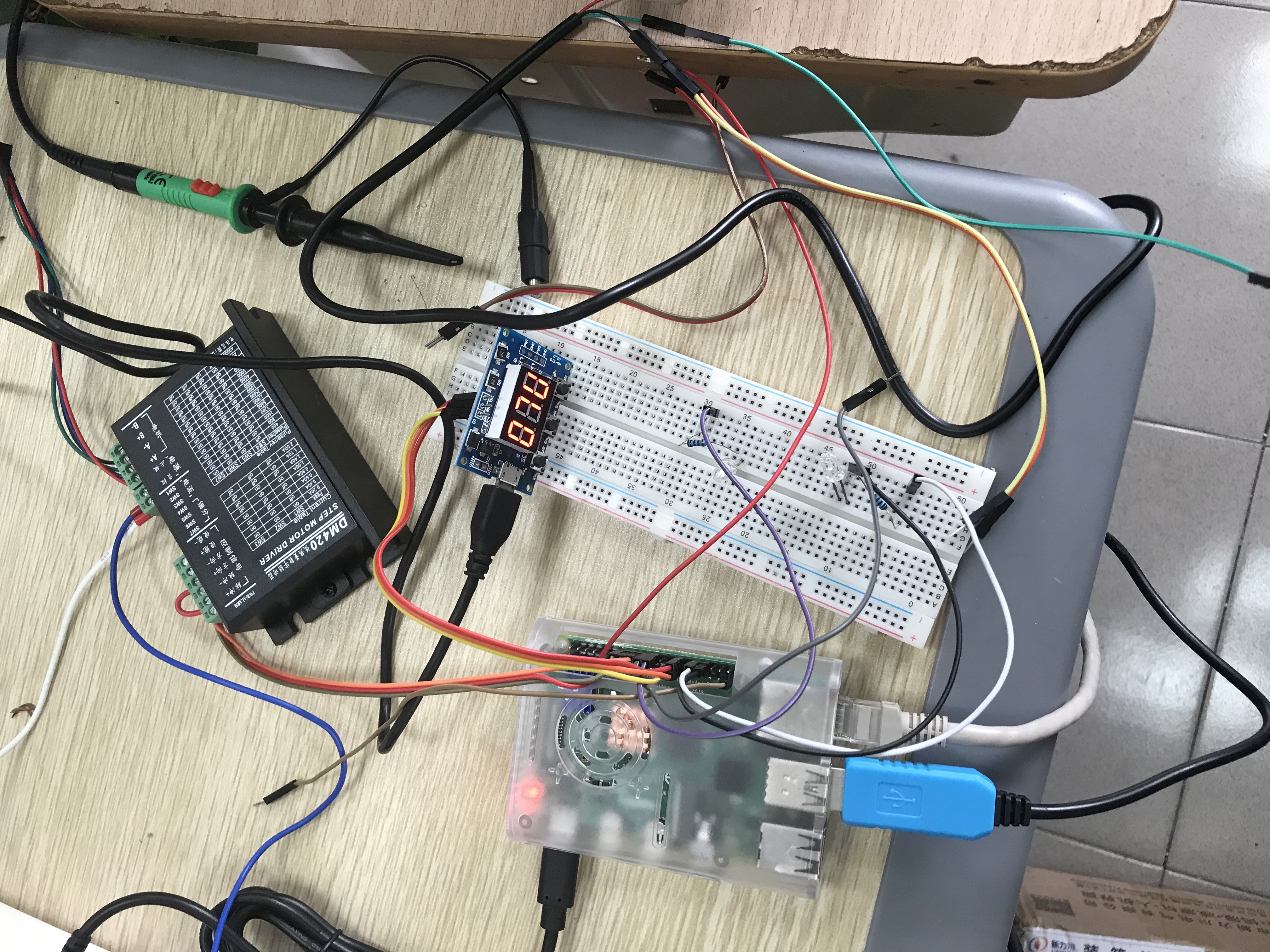
使用树莓派 自带的 uart2 (ttyAMA1)和 usb转ttl串口(ttyUSB0) 均测试通过。
2022年7月21日
CodeSys中编程实现串口通讯的更多相关文章
- 树莓派中QT实现串口通讯
树莓派中QT实现串口通讯 开发平台为QT 此博客QT使用的为WiringPi驱动 我使用的串口调试助手为 cutecom 先简单说一些开发过程中需要注意的问题 Linux 下设备为 tty ,对应在 ...
- 用SPCOMM 在 Delphi中实现串口通讯 转
用Delphi 实现串口通讯,常用的几种方法为:使用控件如MSCOMM和SPCOMM,使用API函数或者在Delphi 中调用其它串口通讯程序.利用API编写串口通信程序较为复杂,需要掌握大量通信 ...
- C# 16进制与字符串、字节数组之间的转换(串口通讯中)
1.c#中如何将十进制数的字符串转化成十六进制数的字符串//十进制转二进制 Console.WriteLine("十进制166的二进制表示: "+Convert.ToString( ...
- VS编程,C#串口通讯,通过串口读取数据的一种方法
一.可能需要的软件:1.虚拟串口vspd(Virtual Serial Port Driver,用来在电脑上虚拟出一对串口,模拟通讯. 2.友善串口调试助手,用来发送.读取数据. 二.思路1.查询本机 ...
- 引用kernel32.dll中的API来进行串口通讯
串口通讯可以引出kernel32.dll中的API来操作,相关源码如下:using System;using System.Runtime.InteropServices; namespace Tel ...
- .Net串口通讯中的若干问题(C#多串口硬件识别、热插拔、Close方法报错问题、IsOpen的可靠性问题)
一.需求场景 最近有时间静下心来研究SDK,串口通讯的.要求实现识别cp210x和cp2303驱动的两款硬件,并且2303的优先级高,即有2303识别之,没有再识别210x:要求实现热插拔,拔掉自动断 ...
- C#中的WinFrom技术实现串口通讯助手(附源码)
C#中的WinFrom技术实现串口通讯助手(附源码) 实现的功能: 1.实现自动加载可用串口. 2.打开串口,并且使用C#状态栏显示串口的状态. 3.实现了串口的接收数据和发送数据功能. 4.串口 ...
- 西门子plc串口通讯方式
西门子plc串口通讯的三种方式 时间:2015-10-25 14:31:55编辑:电工栏目:西门子plc 导读:西门子plc串口通讯的三种方式,分为RS485 串口通信.PPI 通信.MPI 通信,自 ...
- 教程-Delphi MSComm 实时串口通讯
Delphi MSComm 实时串口通讯 MSComm控件具有丰富的与串口通信密切相关的属性,提供了对串口进行的多种操作,进而使串行通信变得十分简便.MSComm的控件属性较多,常用的属性如下:1) ...
随机推荐
- Java语言的词法分析器的Java实现
一.实验目的 1. 学会针对DFA转换图实现相应的高级语言源程序. 2. 深刻领会状态转换图的含义,逐步理解有限自动机. 3. 掌握手工生成词法分析器的方法,了解词法分析器的内部工作原理. 二.实验内 ...
- ONNX Runtime 源码阅读:Graph::SetGraphInputsOutputs() 函数
目录 前言 正文 总结 前言 为了深入理解ONNX Runtime的底层机制,本文将对 Graph::SetGraphInputsOutputs() 的代码逐行分析. 正文 首先判断Graph是否从O ...
- fxksmdb.exe 是什么进程?
今天打开电脑应用进程发现fxksmdb.exe.fxksmpl.exe.fxksmW.exe三个进程,经过查看文件路径发现原来是施乐打印机的驱动程序自带的应用,平时都没注意到这个,这下放心了. 我这里 ...
- 手摸手,带你实现移动端H5瀑布流布局
移动端瀑布流布局是一种比较流行的网页布局方式,视觉上来看就是一种像瀑布一样垂直落下的排版.每张图片并不是显示的正正方方的,而是有的长有的短,呈现出一种不规则的形状.但是它们的宽度通常都是相同的 因为移 ...
- 《Java编程思想》读书笔记(二)
三年之前就买了<Java编程思想>这本书,但是到现在为止都还没有好好看过这本书,这次希望能够坚持通读完整本书并整理好自己的读书笔记,上一篇文章是记录的第一章到第十章的内容,这一次记录的是第 ...
- 让服务调用更简单 - Caller.HttpClient
前言 绝大多数项目都离不开服务调用,服务的调用方式通常是基于Http.RPC协议的调用,需要获取到对应服务的域名或者ip地址以及详细的控制器方法后才能进行调用,如果项目需要支持分布式部署,则需要借助服 ...
- zabbix 添加监控交换机温度item
首先需要获取到交换机温度对应的OID,可以官方文档进行查询(多为私有OID),以盛科为例 官方文档查询到温度节点对于的OID为 10.0.3.102 1.3.6.1.4.1.27975.37.1.3. ...
- zabbix-agent python脚本侦听服务器异常登录,并告警
py脚本 import re,subprocess,time,datetime #gpasswd -a zabbix adm def ftime(a): a = a.replace('Jan','01 ...
- 重新认识 MSBuild - 1
前言 很多人一谈到 MSBuild,脑子里就会出现 "XML"."只能用 VS 的属性框图形界面操作"."可定制性和扩展性差" 和 &quo ...
- Element UI DatePicker 时间跨度限制在同一个月内
<el-date-picker :picker-options="pickerOptions" v-model="rangeTime" type=&quo ...