4.4 ROS节点名称重名
4.4 ROS节点名称重名
场景:ROS 中创建的节点是有名称的,C++初始化节点时通过API:
ros::init(argc,argv,"xxxx");来定义节点名称,在Python中初始化节点则通过rospy.init_node("yyyy")来定义节点名称。在ROS的网络拓扑中,是不可以出现重名的节点的,因为假设可以重名存在,那么调用时会产生混淆,这也就意味着,不可以启动重名节点或者同一个节点启动多次,的确,在ROS中如果启动重名节点的话,之前已经存在的节点会被直接关闭,但是如果有这种需求的话,怎么优化呢?
在ROS中给出的解决策略是使用命名空间或名称重映射。
命名空间就是为名称添加前缀,名称重映射是为名称起别名。这两种策略都可以解决节点重名问题,两种策略的实现途径有多种:
- rosrun 命令
- launch 文件
- 编码实现
以上三种途径都可以通过命名空间或名称重映射的方式,来避免节点重名,本节将对三者的使用逐一演示,三者要实现的需求类似。
案例
启动两个 turtlesim_node 节点,当然如果直接打开两个终端,直接启动,那么第一次启动的节点会关闭,并给出提示:
- [ WARN] [1578812836.351049332]: Shutdown request received.
- [ WARN] [1578812836.351207362]: Reason given for shutdown: [new node registered with same name]
因为两个节点不能重名,接下来将会介绍解决重名问题的多种方案。
4.4.1 rosrun设置命名空间与重映射
1.rosrun设置命名空间
1.1设置命名空间演示
语法: rosrun 包名 节点名 __ns:=新名称
- rosrun turtlesim turtlesim_node __ns:=/xxx
- rosrun turtlesim turtlesim_node __ns:=/yyy
两个节点都可以正常运行
1.2运行结果
rosnode list查看节点信息,显示结果:
- /xxx/turtlesim
- /yyy/turtlesim

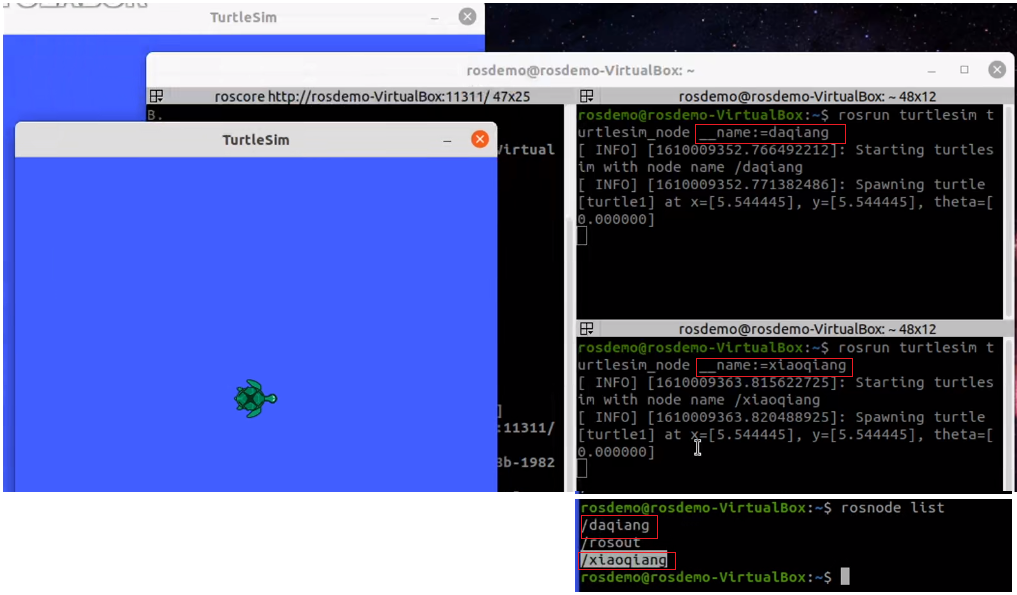
2.rosrun名称重映射
2.1为节点起别名
语法: rosrun 包名 节点名 __name:=新名称
- rosrun turtlesim turtlesim_node __name:=t1 | rosrun turtlesim turtlesim_node /turtlesim:=t1(不适用于python)
- rosrun turtlesim turtlesim_node __name:=t2 | rosrun turtlesim turtlesim_node /turtlesim:=t2(不适用于python)
两个节点都可以运行
2.2运行结果
rosnode list查看节点信息,显示结果:
- /t1
- /t2
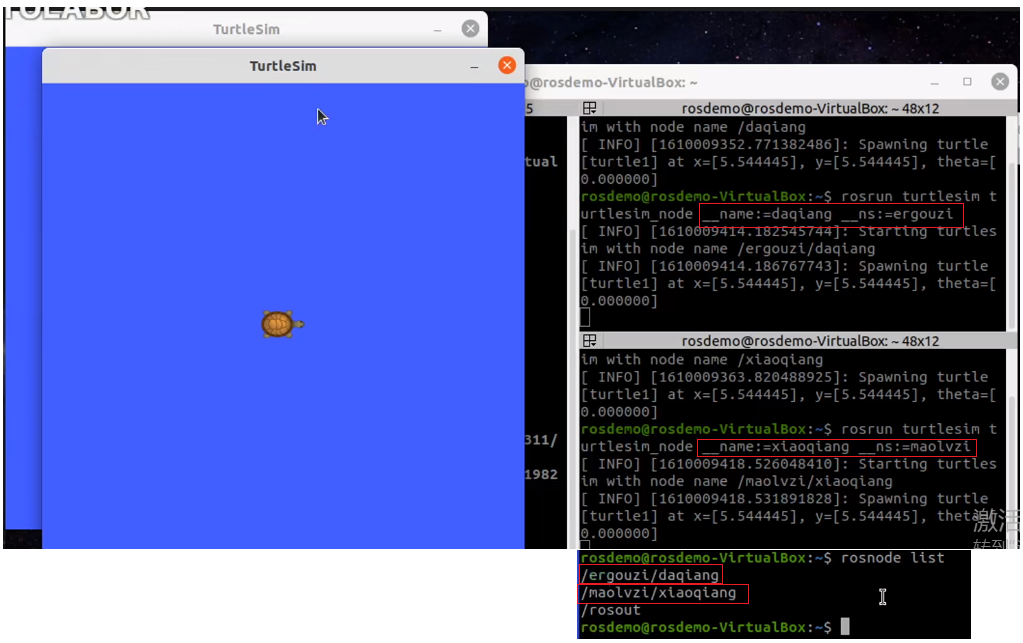
3.rosrun命名空间与名称重映射叠加
3.1设置命名空间同时名称重映射
语法: rosrun 包名 节点名 __ns:=新名称 __name:=新名称
- rosrun turtlesim turtlesim_node __ns:=/xxx __name:=tn
3.2运行结果
rosnode list查看节点信息,显示结果:
- /xxx/tn
使用环境变量也可以设置命名空间,启动节点前在终端键入如下命令:
export ROS_NAMESPACE=xxxx
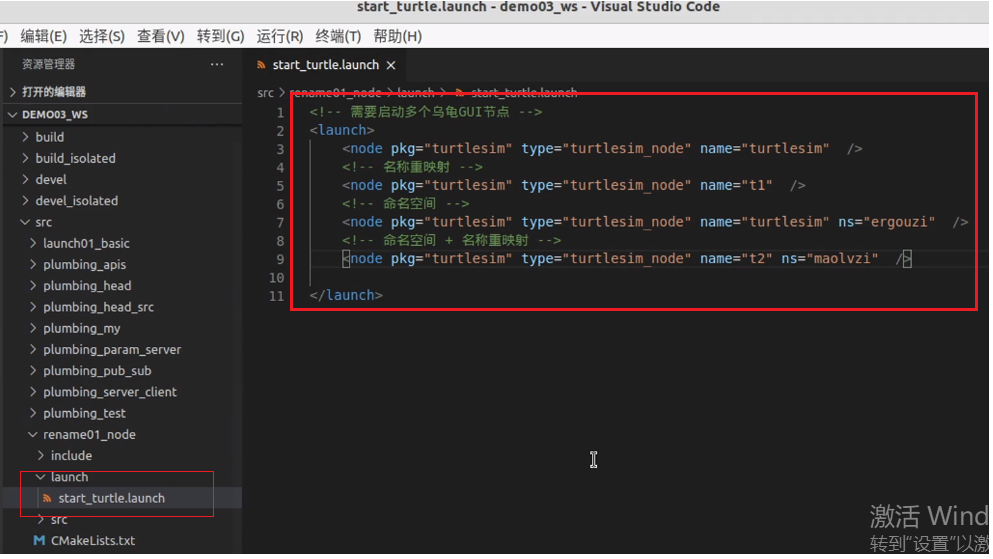
4.4.2 launch文件设置命名空间与重映射
介绍 launch 文件的使用语法时,在 node 标签中有两个属性: name 和 ns,二者分别是用于实现名称重映射与命名空间设置的。使用launch文件设置命名空间与名称重映射也比较简单。
1.launch文件
- <launch>
- <node pkg="turtlesim" type="turtlesim_node" name="t1" />
- <node pkg="turtlesim" type="turtlesim_node" name="t2" />
- <node pkg="turtlesim" type="turtlesim_node" name="t1" ns="hello"/>
- </launch>
在 node 标签中,name 属性是必须的,ns 可选。
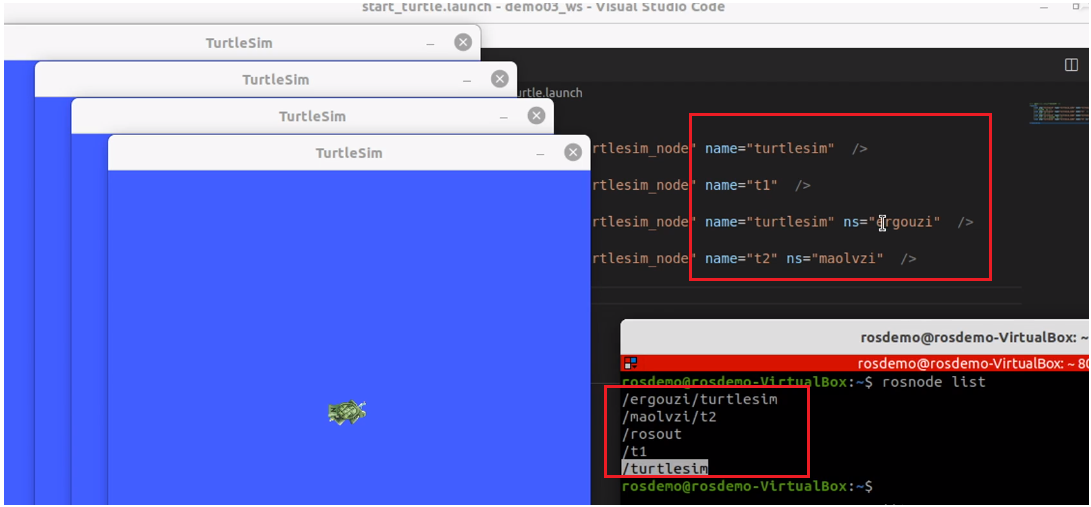
2.运行
rosnode list查看节点信息,显示结果:
- /t1
- /t2
- /t1/hello
4.4.3 编码设置命名空间与重映射
如果自定义节点实现,那么可以更灵活的设置命名空间与重映射实现。
1.C++ 实现:重映射
1.1名称别名设置
核心代码:
- ros::init(argc,argv,"zhangsan",ros::init_options::AnonymousName);
1.2执行
会在名称后面添加时间戳。
2.C++ 实现:命名空间
2.1命名空间设置
核心代码
- std::map<std::string, std::string> map;
- map["__ns"] = "xxxx";
- ros::init(map,"wangqiang");
2.2执行
节点名称设置了命名空间。
3.Python 实现:重映射
3.1名称别名设置
核心代码:
- rospy.init_node("lisi",anonymous=True)
3.2执行
会在节点名称后缀时间戳。
4.4 ROS节点名称重名的更多相关文章
- db2 v9.5迁移至v10.5,及遇重名节点数据库无法创建db的解决办法
同系统同版本可以使用备份恢复,本文前提是不同系统不同版本,使用db2move命令. 1.db2move db db_name export 此处注意,先建个目录放文件,因为文件比较多,如果上来直接ex ...
- C#获取Excel Sheet名称,对特殊字符、重名进行了处理
/// <summary> /// 获取指定Excel内Sheet集合 /// </summary> /// <param na ...
- 4.2 ROS节点运行管理launch文件
4.2 ROS节点运行管理launch文件 关于 launch 文件的使用我们已经不陌生了,在第一章内容中,就曾经介绍到: 一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌 ...
- ROS学习(六)—— 理解ROS节点
一.准备工作 下载一个轻量级的模拟器 sudo apt-get install ros-kinetic-ros-tutorials 二.图概念的理解 1.Nodes:一个节点就是一个可执行文件,用来与 ...
- ROS节点理解--5
理解 ROS节点(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/) Description: 本教程主要介绍 ROS 图(graph)概念 并讨 ...
- ROS Learning-007 beginner_Tutorials ROS节点
ROS Indigo beginner_Tutorials-06 ROS节点 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- ROS学习笔记三:编写第一个ROS节点程序
在编写第一个ROS节点程序之前需要创建工作空间(workspace)和功能包(package). 1 创建工作空间(workspace) 创建一个catkin_ws: #注意:如果使用sudo一次 ...
- ROS节点的初始化及退出详解(ros::init、SIGINT、ros::ok、ros::NodeHandle
https://haoqchen.site/2018/04/28/ROS-node-init/ #include "ros/ros.h" #include <signal.h ...
- (转载)myeclipse项目名称重命名
myeclipse项目名称重命名 实例1 今天晚上在做一个jsp唱片显示的实例,myeclipse项目名称原本想写music结果写成了musci.这就需要项目名称的重命名,单纯的使用 “重构--> ...
随机推荐
- GBDT 梯度提升决策树简述
首先明确一点,gbdt 无论用于分类还是回归一直都是使用的CART 回归树.不会因为我们所选择的任务是分类任务就选用分类树,这里面的核心是因为gbdt 每轮的训练是在上一轮的训练的残差基础之上进行训练 ...
- 基于消息队列(RabbitMQ)实现延迟任务
一.序言 延迟任务应用广泛,延迟任务典型应用场景有订单超时自动取消:支付回调重试.其中订单超时取消具有幂等性属性,无需考虑重复消费问题:支付回调重试需要考虑重复消费问题. 延迟任务具有如下特点:在未来 ...
- 网络标准之:永远是1.0版本的MIME
目录 简介 MIME详解 MIME头 MIME-Version Content-Type Content-Disposition Content-Transfer-Encoding Encoded-W ...
- 解决矩池云GPU显存未释放问题
很多用户反馈说终止程序之后,显存依然被占用,这里我们提供了两种解决方案,帮助用户解决这个问题. nvidia-smi查看 我们可以先用如下命令 nvidia-smi 查看一下当前GPU进程情况. _ ...
- tp5 全选,全不选 ,ajax批量删除
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- vue项目在nginx中不能刷新问题
修改nginx配置文件为 server { listen 80; server_name www.vue.com; root html/xxx/dist/; client_max_body_size ...
- svn服务支持网页显示并增加在线预览功能,支持视频在线播放
1.svn服务器支持网页显示 VisualSVN Server是一个非常不错的SVN Server程序,方便,直观,用户管理也异常方便.不过,它本身并没有提供在线修改密码的功能.由于在实际使用过程中, ...
- CF678F题解
首先题意中的有撤销操作,直接李超树肯定不行,题目允许离线,所以考虑线段树分治 所以问题就变成了求一次函数最大值 这不是李超树板子吗??? 然后可以对每个节点都建立动态开点李超树,查询的时候直接从叶子节 ...
- Android系统编程入门系列之硬件交互——通信硬件电信SIM卡
现在的SIM卡通常具备基站定位.语音通话.短信消息.网络流量这四大功能,而在移动端是无法对SIM卡使用基站定位功能的,所以这里只介绍移动端如何使用SIM卡实现语音通话.短信消息.数据流量三个功能. 语 ...
- 如何将docker 镜像上传到docker hub仓库
如何将docker 镜像上传到docker hub仓库 目录 如何将docker 镜像上传到docker hub仓库 背景 1.注册docker hub账号 2.docker hub上创建仓库 3.d ...