从零开始一起学习SLAM | 为什么要用齐次坐标?
在涉及到计算机视觉的几何问题中,我们经常看到齐次坐标这个术语。本文介绍一下究竟为什么要用齐次坐标?使用齐次坐标到底有什么好处?
什么是齐次坐标?
简单的说:齐次坐标就是在原有坐标上加上一个维度:


使用齐次坐标有什么优势?
齐次坐标的使用能够大大简化在三维空间中的点线面表达方式和旋转平移等操作,具体分如下几点进行说明。
1、能否非常方便的表达点在直线或平面上
在2D平面上,一条直线 l 可以用方程 ax + by + c = 0 来表示,该直线用向量表示的话一般记做
我们知道点p = (x, y)在直线 l 上的充分必要条件是 ax + by + c = 0
如果使用齐次坐标的话,点p的齐次坐标就是
p’=(x, y, 1)
那么 ax + by + c = 0 就可以用两个向量的内积(点乘)来表示:

因此,点p在直线l上的充分必要条件就是 直线l 与p的齐次坐标p’的内积:
是不是很方便呢!
同理,我们知道 三维空间的一个平面A可以用方程 ax + by + cz + d = 0 来表示,三维空间的一个点P=(x, y, z) 的齐次坐标 P’=(x, y, z, 1),类似的,点P在空间平面A上可以用两个向量的内积来表示,如下:

因此,点P在平面A上的充分必要条件就是平面A 向量与P的齐次坐标P’的内积(点乘):

2、方便表达直线与直线,平面与平面的交点
先给出结论,后面再具体解释:
结论:在齐次坐标下,可以用两个点 p, q 的齐次坐标叉乘结果来表达一条直线 l,也就是
l = p x q
也可以使用两条直线 l, m 的叉乘表示他们的交点 x
x = l x m
见下面示例图。

之所以可以这么简洁的表示交点是因为采用了齐次坐标的表示方式。
那么这是为什么呢?
先介绍一下叉乘(也称叉积、外积)的概念:
两个向量 a和b 的叉乘仅在三维空间中有定义,写作 a x b
a x b 是与向量 a, b都垂直的向量,其方向通过右手定则(见下图)决定。
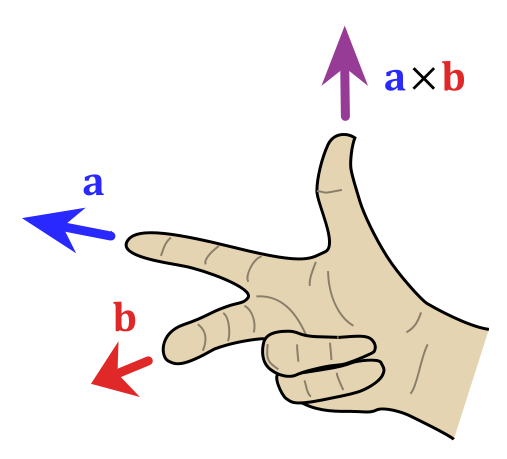
其模长等于以两个向量为边的平行四边形的面积(见下图)。
叉乘可以定义为:

其中 θ表示a, b的夹角(0°到180°之间),||a||, ||b||是向量a, b的模长
n则是一个与向量a, b所构成的平面垂直的单位向量

根据叉乘定义:
向量自身叉乘结果为0,因为夹角为0。也就是说三维向量 a x a =0, b x b = 0而点乘(也称点积,内积)的定义是
a * b = ||a||* ||b|| *cos(θ)
根据定义:如果两个向量垂直,cos(θ) = 0,点积也为0。
好了,经过上面点乘和叉乘定义的铺垫。下面来推导一下上面的结论:
为什么两条直线 l, m 的叉乘 l x m 等于它们的交点 p,也就是 p = l x m?
原因如下:首先,根据前面叉乘的定义,l x m 的结果向量(记为 p = l x m) 与 l 和 m都垂直,根据点乘的定义,垂直的向量之间的点积为0,因此可以得到:
因此,根据前面点在直线上的结论,可以看到p既在直线l 上又在直线m上,所以 p = l x m 是两条直线的交点。此处 p 是齐次坐标。
同样的,可以证明,两点p, q 的叉乘 可以表示 过两点的直线l,即 l = p x q。(留做作业)
3、能够区分一个向量和一个点
先给出结论:
(1)从普通坐标转换成齐次坐标时
如果(x,y,z)是个点,则变为(x,y,z,1);
如果(x,y,z)是个向量,则变为(x,y,z,0)
(2)从齐次坐标转换成普通坐标时
如果是(x,y,z,1),则知道它是个点,变成(x,y,z);
如果是(x,y,z,0),则知道它是个向量,仍然变成(x,y,z)
具体解释见:
http://www.cnblogs.com/csyisong/archive/2008/12/09/1351372.html
4、能够表达无穷远
比如 两条平行的直线 ax+by+c=0, ax+by+d=0,
可以分别用向量 l = (a, b, c), m = (a, b,d)表示
根据前面直线交点的计算方法,其交点为 l x m
根据叉乘计算法则
向量
的叉乘结果可以用如下方法计算得到
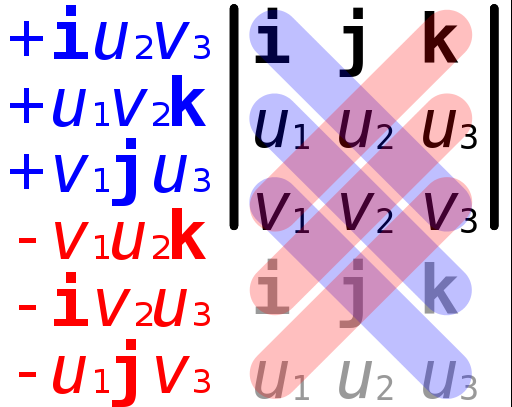
最终:l x m = (d-c)(b,-a,0),忽略标量(d-c),我们得到交点为(b,-a,0),并且是齐次坐标,如果要转化为非齐次坐标,那么会得到 (b/0, a/0),坐标是无穷大,可以认为该点为无穷远点,这与我们通常理解的:平行线相交于无穷远的概念相吻合。
因此,如果一个点的齐次坐标中,最后一个元素为0,则表示为无穷远点。
5、更简洁的表达欧氏空间变换
这是齐次坐标最重要的一个优势之一。在以后的学习中你会更加深刻的理解。
使用齐次坐标,可以方便的将加法转化为乘法,方便的表达平移。
比如我们要完成将2D坐标点x=[u,v]’ 平移t=[tu, tv],如果用非齐次方法的话,是用如下的加法

如果用齐次坐标表示时可以将加法转换为乘法

在欧氏变换中一般有两种操作:旋转和平移。
如果我们想要将向量a进行一个标准的欧氏变换,一般是先用旋转矩阵R进行旋转,然后再用向量t进行平移,其结果a’ = R*a + t,这样看起来没什么问题。
但是,我们知道SLAM中一般都是连续的欧氏变换,所以会有多次连续的旋转和平移,假设我们将向量a进行了两次欧氏变换,分别为R1, t1 和 R2,t2,分别得到:
b = R1a + t1, c = R2b + t2
最终的结果 c = R2*(R1*a + t1) + t2
显然,这样的变换在经过多次后会变的越来越复杂。其根本原因是上述表达方式并不是一个线性的变换关系。
此时,齐次坐标就显示出它的魅力了,如果使用齐次坐标来表达 a’ = R*a + t 的话可以写为:
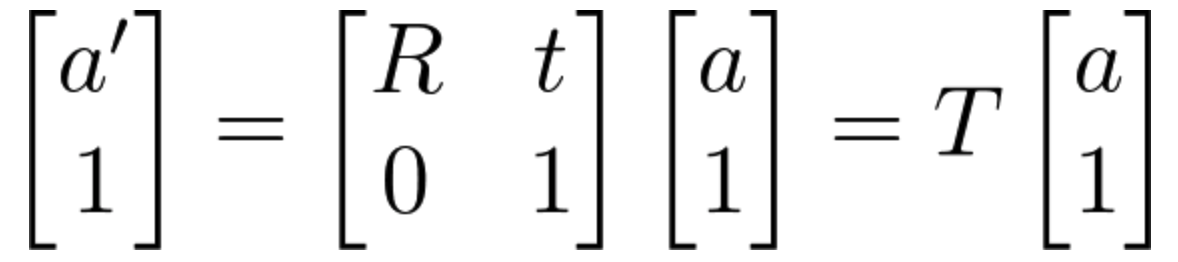
旋转和平移可以用一个矩阵T来表示,该矩阵T称为变换矩阵(transform matrix),这样欧氏变换就变成了线性关系,进行多次欧氏变换只需要连乘变换矩阵就行了,比如前面的两次欧氏变换使用齐次坐标就可以表示为:

其中,波浪号代表齐次坐标。一般的,在SLAM中,b = Ta 的形式默认都是齐次坐标。
关于齐次坐标的优势还有哪些呢?欢迎留言补充。
作业
证明:两点p, q 的叉乘 可以表示 过两点的直线l,即 l = p x q(提示:参考本文前面的证明)
欢迎留言讨论,更多学习视频、文档资料、参考答案等进入公众号“计算机视觉life”,菜单栏点“知识星球”,「从零开始学习SLAM」和其他学习SLAM学的伙伴一起学习交流~
原文链接:从零开始一起学习SLAM | 为什么要用齐次坐标?
相关阅读
---------------------
作者:electech6
来源:CSDN
原文:https://blog.csdn.net/electech6/article/details/83315237
版权声明:本文为博主原创文章,转载请附上博文链接!
从零开始一起学习SLAM | 为什么要用齐次坐标?的更多相关文章
- 从零开始一起学习SLAM | 掌握g2o边的代码套路
点"计算机视觉life"关注,置顶更快接收消息! 小白:师兄,g2o框架<从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码>,以及顶点<从零开始 ...
- 从零开始一起学习SLAM | 掌握g2o顶点编程套路
点"计算机视觉life"关注,置顶更快接收消息! ## 小白:师兄,上一次将的g2o框架<从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码>真的很清晰 ...
- 从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」 这可能是最清晰讲解g2o代码框架的文章 理解图优化,一步步带你看懂g2o框架 小白:师兄师兄,最近我在看SLAM的优化算法,有种 ...
- 从零开始一起学习SLAM | 点云平滑法线估计
点击公众号"计算机视觉life"关注,置顶星标更快接收消息! 本文编程练习框架及数据获取方法见文末获取方式 菜单栏点击"知识星球"查看「从零开始学习SLAM」一 ...
- 从零开始一起学习SLAM | 给点云加个滤网
对VSLAM和三维重建感兴趣的在计算机视觉life"公众号菜单栏回复"三维视觉"进交流群. 小白:师兄,上次你讲了点云拼接后,我回去费了不少时间研究,终于得到了和你给的参 ...
- 从零开始一起学习SLAM | 你好,点云
本文提纲 先热热身点云是啥你知道点云优缺点吗?点云库PCL:开发者的福音PCL安装指北炒鸡简单的PCL实践留个作业再走先热热身 小白:hi,师兄,好久不见师兄:师妹好,上周单应矩阵作业做了吗?小白:嗯 ...
- 从零开始一起学习SLAM | 神奇的单应矩阵
小白最近在看文献时总是碰到一个奇怪的词叫“homography matrix”,查看了翻译,一般都称作“单应矩阵”,更迷糊了.正所谓:“每个字都认识,连在一块却不认识”就是小白的内心独白.查了一下书上 ...
- 从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
自从小白向师兄学习了李群李代数和相机成像模型的基本原理后,感觉书上的内容没那么难了,公式推导也能推得动了,感觉进步神速,不过最近小白在学习对极几何,貌似又遇到了麻烦... 小白:师兄,对极几何这块你觉 ...
- 从零开始一起学习SLAM | 相机成像模型
上一篇文章<从零开始一起学习SLAM | 为啥需要李群与李代数?>以小白和师兄的对话展开,受到了很多读者的好评.本文继续采用对话的方式来学习一下相机成像模型,这个是SLAM中极其重要的内容 ...
随机推荐
- MyEclipse中的几种查找方法
在编程中常常需要用到查找功能,这里根据日常的使用总结一下常用的集中查找方法 Ctrl+H:在MyEclipse中打开Search弹出框,或者在菜单中打开Search弹出框, 定位到 File Sear ...
- 【每日一题】 UVA - 1589 Xiangqi 函数+模拟 wa了两天
题意:背景就是象棋, 题解:坑点1(wa的第一天):将军可以吃掉相邻的棋子,(然行列也写反了orz) 坑点2(wa的第二天):将军到马要反过来写,边界有误,并且第一次碰到的车才算(写到后来都忘了) # ...
- shell脚本之分析oracle数据库数据泵日志中表的大小
1.分析日志格式如下 . . imported "xxx_330508"."xxx_T_DATA" 46.17 MB 268 rows . . imported ...
- Shell实现判断进程是否存在并重新启动脚本
Shell实现判断进程是否存在并重新启动脚本 - superbfly的专栏 - CSDN博客 https://blog.csdn.net/superbfly/article/details/52513 ...
- ios -RunLoop(简单理解)
一. RunLoop简介 RunLoop字面意思是运行时,即跑圈得意思.它可以在我们需要的时候自己跑起来运行,在我们没有操作的时候就停下来休息,充分节省CPU资源,提高程序性能. 二. RunLoop ...
- Calcite - StreamingSQL
https://calcite.apache.org/docs/stream.html Calcite's SQL is an extension to standard SQL, not ano ...
- python运算符,数据类型,数据类型操作,三目运算,深浅拷贝
算数运算符: Py2中精确除法需要导入:from __future__ import division,(符由特 ,将来的.滴未省,除法) py3不需要导入 赋值运算符: 比较运算符: 成员运算符: ...
- ORACLE监听配置及测试实验(2)
实验四 在tnsname.ora里添加默认监听代号 [oracle@oracle01 admin]$ vi tnsnames.ora 添加一行 PORT1528=(ADDRESS = (PROTOCO ...
- Android SDK 环境变量
系统变量 PATH中加入 C:\Program Files (x86)\Android\android-sdk\platform-tools 和 C:\Program Files (x86)\Andr ...
- python_flask 注册,登陆,退出思路 ---纯个人观点
1注册逻辑首先查询数据库用户名 并判断用户是否存在,如不存在就插入数据 并返回响应给前端2前端模板获取注册信息 判断 用户名不能为空及密码不能为空,和密码不一致 拼接注册url 组成get获取对象 响 ...