ubuntu12.04+fuerte 下跑通lsd-slam——数据集
lsd-slam(下载链接:https://github.com/tum-vision/lsd_slam)提供了两种方法,一种是用数据集(下载地址http://vision.in.tum.de/lsdslam),一种是用usb摄像头,github也有相应的使用说明,不是很详细,下面介绍我的步骤.ps:也是一个slam新手,很多东西不懂,有错误的地方请大家指出
环境:ubuntu12.04+fuerte
目标:使用数据集,跑通lsd-slam
1.安装ubuntu12.04。我装的是双系统,不太建议用虚拟机,最开始使用虚拟机没有成功,后来换成了双系统
2.安装fuerte。按照http://wiki.ros.org/fuerte/Installation/Ubuntu这个教程来,接着是设置ROS环境,按照http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment这个步骤来,注意第4步,要选择rosbuild,此处
source ~/fuerte_workspace/setup.bash
如果这样设置,只对当前shell有效,导致每开一个新的shell都需要执行上述这条命令,可以添加环境变量
echo "source ~/fuerte_workspace/setup.bash" >> ~/.bashrc
source ~/.bashrc
这样一次修改,永久有效。
3.在shell中执行
roscore
结果:
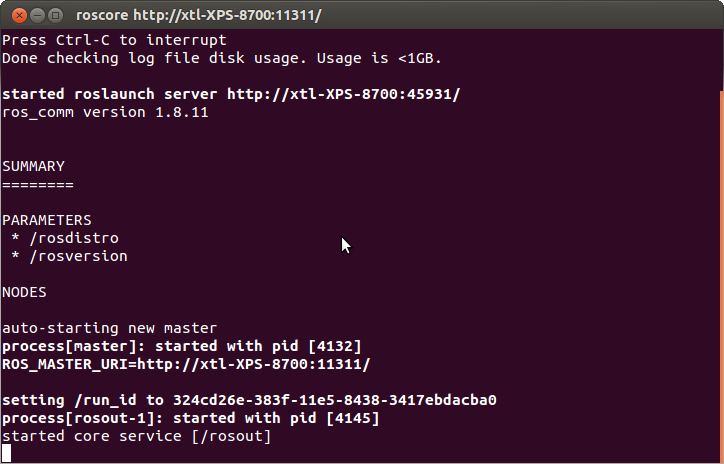
roscore要一直运行
4.打开一个新的shell,执行
rosrun lsd_slam_viewer viewer
结果:

可以看到PointCloud Viewer中什么都没有显示
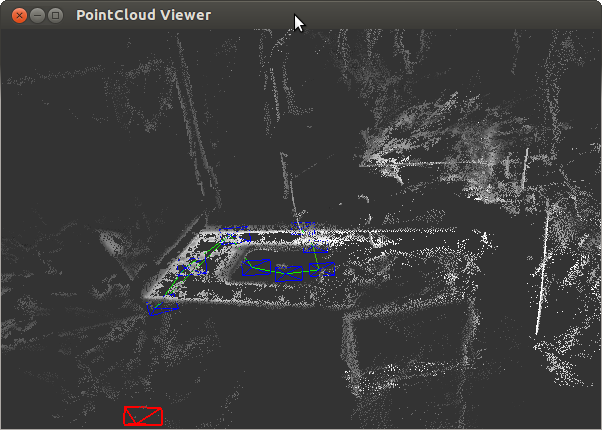
5.打开一个新的shell,执行
rosrun lsd_slam_core dataset_slam _files:=<files> _hz:=<hz> _calib:=<calibration_file>
<files>表示数据集中图片的存放路径,<hz>表示帧率,可以为0,<calibration_file>表示校正文件的路径,如我的
rosrun lsd_slam_core dataset_slam _files:=/home/xtl/fuerte_workspace/sandbox/LSD_room_images/LSD_room/images _hz:=0 _calib:=/home/xtl/fuerte_workspace/sandbox/LSD_room_images/LSD_room/cameraCalibration.cfg
结果
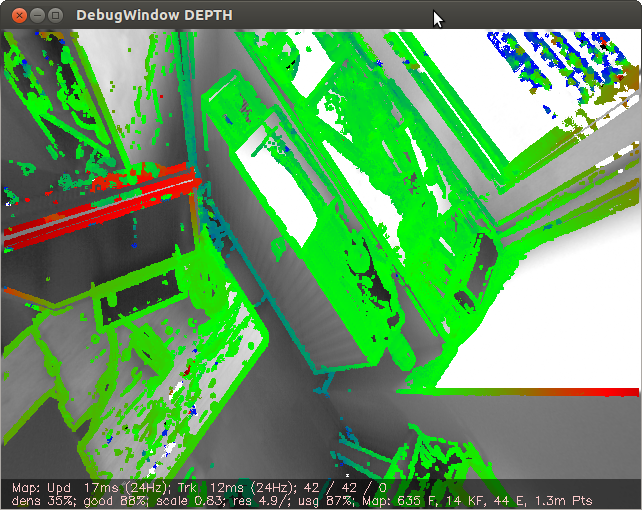
同时Point Cloud Viewer中显示出点云
下一篇将介绍如何使用usb摄像头跑lsd-slam。
原创文章,转载请注明出处
ubuntu12.04+fuerte 下跑通lsd-slam——数据集的更多相关文章
- ubuntu12.04+fuerte 下跑通lsd-slam——使用usb摄像头
上一篇介绍了如何使用数据集跑lsd-slam,这篇介绍如何用一个普通的usb摄像头跑lsd-slam,默认ubuntu12.04,fuerte已经安装好,workspace也已设置,如果没有,请参考上 ...
- Ubuntu12.04(64bit)下安装Qt4总结
本文主要介绍linux系统Ubuntu12.04(64bit)下Qt4.8.5的安装,其中还涉及Fedora9下Qt4的安装. 1.下载软件:去Qt的官网下载Qt4.8.5和Qt Creator软件, ...
- ubuntu-12.04.1-desktop-x64下JDK环境的安装与配置
1.上oracle官网下载最新的JDK.在这里,我的系统是ubuntu-12.04.1-desktop-amd64,目前位置JDK的最新版本位7u9.jdk-for-linux有两种安装包,一种是rp ...
- Ubuntu下跑通py-faster-rcnn、详解demo运作流程
在不同的服务器不同的机器上做过很多次实验,分别遇到各种不一样的错误并且跑通Py-Faster-RCNN,因此,在这里做一个流程的汇总: 一.下载文件: 首先,文件的下载可以有两种途径: 1.需要在官网 ...
- ubuntu-12.04.5下编译openjdk8
bash ./configure --with-target-bits=64 --with-boot-jdk=/usr/java/jdk1.7.0_80/ --with-debug-level=slo ...
- 阿里云ubuntu12.04环境下配置Apache+PHP+PHPmyadmin+MYsql
此教程中使用的相关IP等设置,在你的环境中要做相应修改. 使用之前更新apt-get,因为服务器基本上是一个裸系统 apt-get update;apt-get upgrade; 1 我们使用root ...
- 【转】Ubuntu12.04 LTS下环境变量设置
原文网址:http://blog.chinaunix.net/uid-26963688-id-3221439.html 1.设置当前用户环境变量(对root用户无效) 打开终端输入:light@cha ...
- Ubuntu12.04 64bit 下安装VNC server
1. 安装gonme核心包(如果是字符界面的话) apt-get install x-window-system-coreapt-get install gnome-core (下载完成后需要安装dg ...
- Ubuntu12.04下eclipse提示框黑色背景色的修改方法
eclipse提示框的背景颜色使用的是系统的提示框颜色配置,在windows下为黄色,但在Ubuntu12.04(gnome)下却是黑色,造成提示内容很难看清. 在eclipse中我们是无法修改这个颜 ...
随机推荐
- Android中自定义veiw使用Java中的回调方法
//------------------MainActivity----中---------------------------------- import android.os.Bundle;imp ...
- stray '/241' in program 错误
意思是c/c++中的编译错误. 该错误是指源程序中有非法字符,需要去掉非法字符.一般是由于从别的地方粘贴过来造成的. 方法:1.把所粘的文字放到记事本里就行了 2.把出错行的空格删掉重新打一下试试.
- oracle 管理
1.管理数据的用户主要是:sys和system. 区别:(1)sys所有oracle的数据字典的基表和视图都存放在sys用户中,这些基表和视图对于oracle是至关重要的,由数据库自己维护,任何用户都 ...
- 在ubuntu 上创建 ssl 证书
soap webservice 调试工具: soap UI, 可以下载下来玩一玩. Introduction TLS, or transport layer security, and its pre ...
- jsp 获取cookie 的值的方法
Cookie cookies[]=request.getCookies(); //读出用户硬盘上的Cookie,并将所有的Cookie放到一个cookie对象数组里面 Cookie sCookie=n ...
- Nested weights are bad for performance
警告信息“Nested weights are bad for performance”的消除方法 原因分析:在布局进行嵌套使用时,父布局与子布局都使用了android:layout_weight,但 ...
- [Unity]C#.数据类型总结
C#中的数据类型 [TOC] 通用类型系统 C#中,变量是值还是引用仅取决于数据类型 所有的数据类型都是对象.因为它们具有自己ide方法和属性 int int_value = 101; //调用*in ...
- Linux:crontab的安装以及使用方法
安装crontab: [root@wulaoer ~]# yum install vixie-cron [root@wulaoer ~]# yum install crontabs 说明:vixie- ...
- 仿苹果短信(微信 ,qq)左划弹出菜单
难点: 1.功能的实现,左划.ListView的复用 2.单行显示,多行显示 3.ListView分割线.点击阴影,上下滑动左右滑动无阴影.多点触控改为单点触控 4.融球动画 http://blog. ...
- Laravel Cache 使用
在项目中使用 laravel 的 cache 时,使用下面形式方法: $value = Cache::remember('users', $minutes, function() { return D ...