(七)目标检测算法之SSD
系列博客链接:
(一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html
(二)目标检测算法之R-CNN https://www.cnblogs.com/kongweisi/p/10895055.html
(三)目标检测算法之SPPNet https://www.cnblogs.com/kongweisi/p/10899771.html
(四)目标检测算法之Fast R-CNN https://www.cnblogs.com/kongweisi/p/10900021.html
(五)目标检测算法之Faster R-CNN https://www.cnblogs.com/kongweisi/p/10904260.html
(六)目标检测算法之YOLO https://www.cnblogs.com/kongweisi/p/11001688.html
本文概述:
- 目标
- 知道SSD的结构
- 说明Detector & classifier的作用
- 说明SSD的优点
1 SSD
1.1 简介
SSD算法源于2016年发表的算法论文,论文网址:https://arxiv.org/abs/1512.02325
SSD的特点在于:
SSD结合了YOLO中的回归思想和Faster-RCNN中的Anchor机制,使用全图各个位置的多尺度区域进行回归,既保持了YOLO速度快的特性,也保证了窗口预测的跟Faster-RCNN一样比较精准。
SSD的核心是在不同尺度的特征特征图上采用卷积核来预测一系列Default Bounding Boxes的类别、坐标偏移。
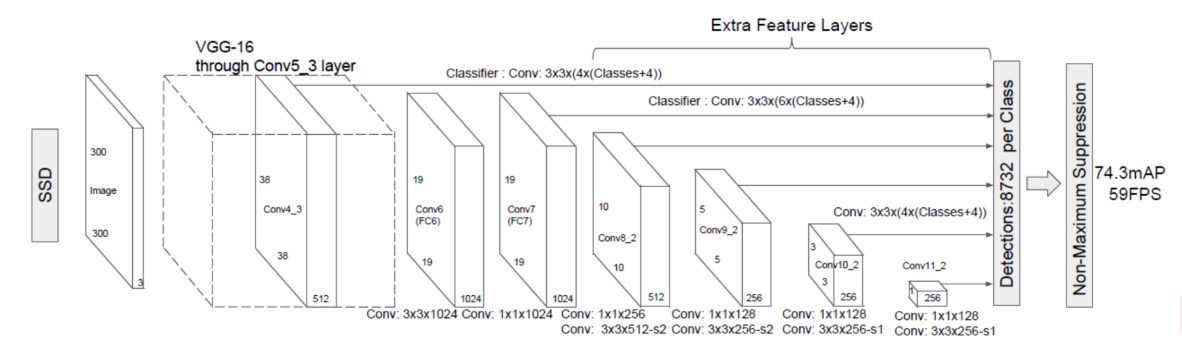
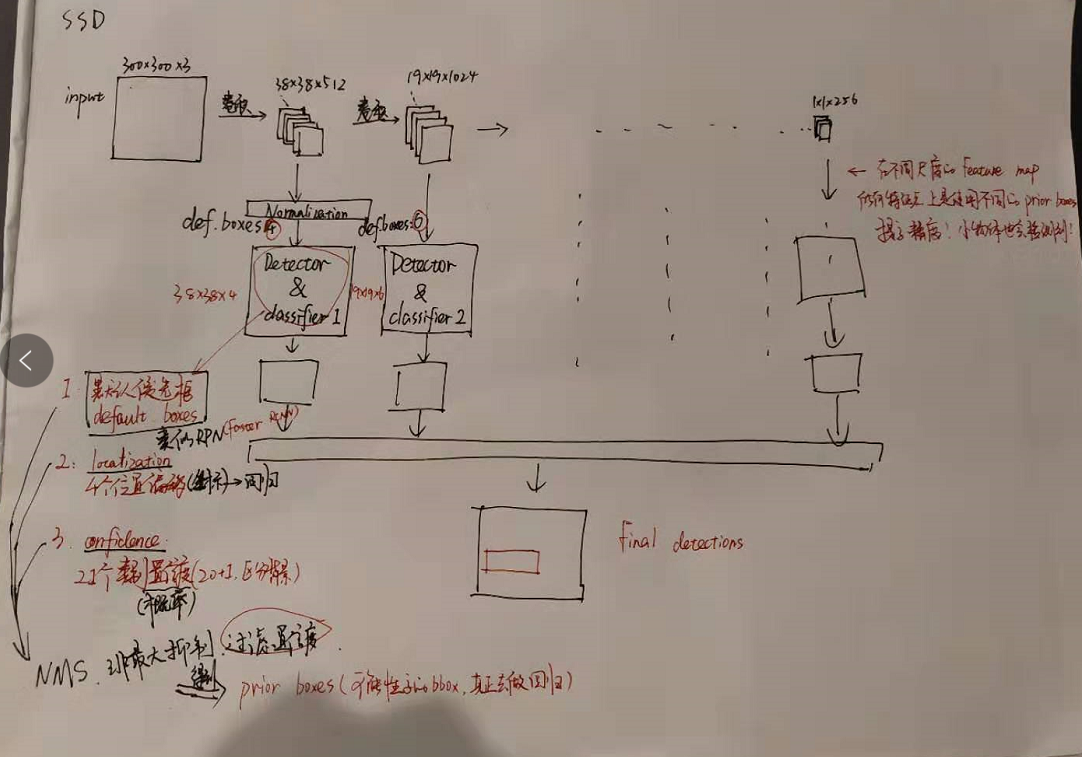
1.2 结构
以VGG-16为基础,使用VGG的前五个卷积,后面增加从CONV6开始的5个卷积结构,输入图片要求300*300。
1.3 流程
SSD中引入了Defalut Box,实际上与Faster R-CNN的anchor box机制类似,就是预设一些目标预选框,
不同的是在不同尺度feature map所有特征点上是使用不同的prior boxes
1.4 Detector & classifier
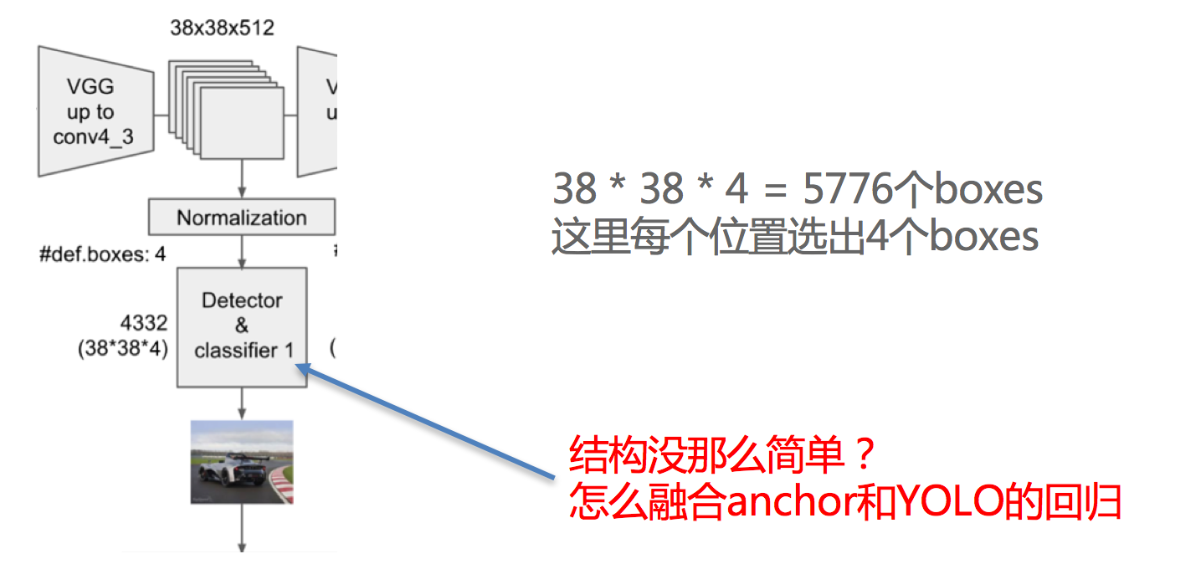
Detector & classifier的三个部分:
1.default boxes: 默认候选框
2.localization:4个位置偏移
3.confidence:21个类别置信度(要区分出背景)
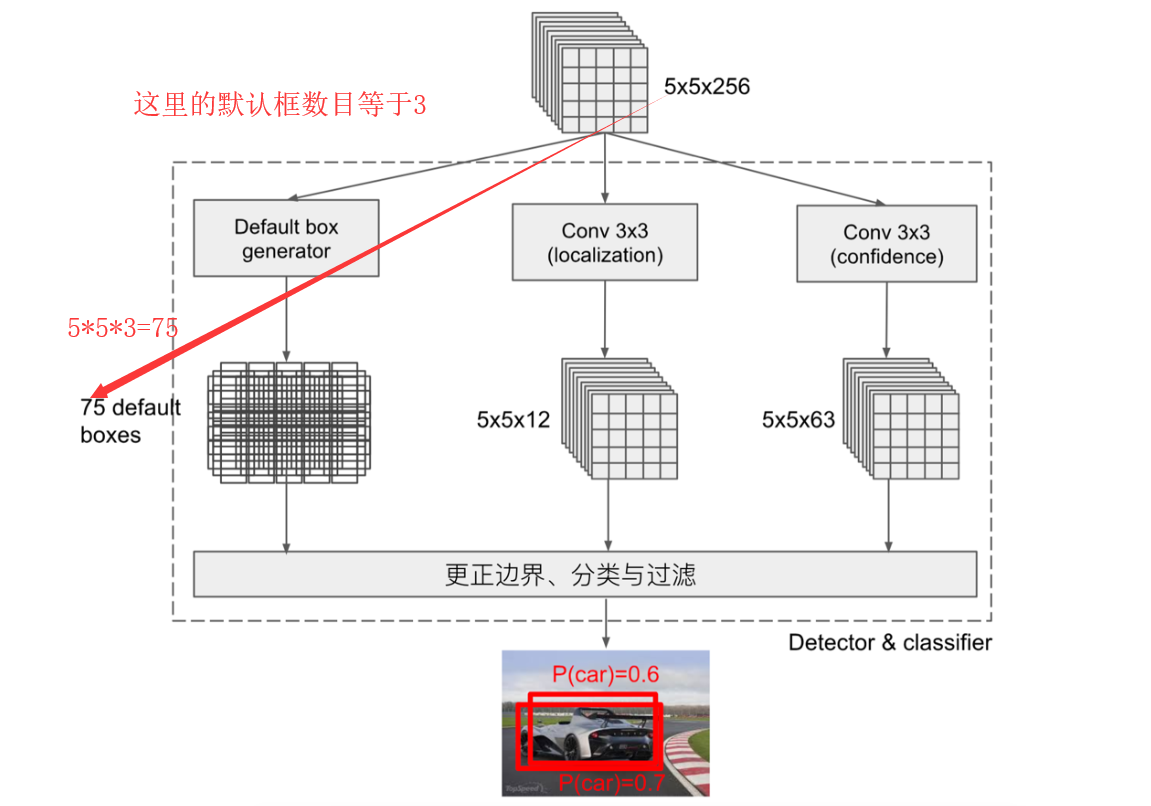
1.4.1 default boxes
default boxex类似于RPN当中的滑动窗口生成的候选框,SSD中也是对特征图中的每一个像素生成若干个框。
只不过SSD当中的默认框有生成的公式
了解:
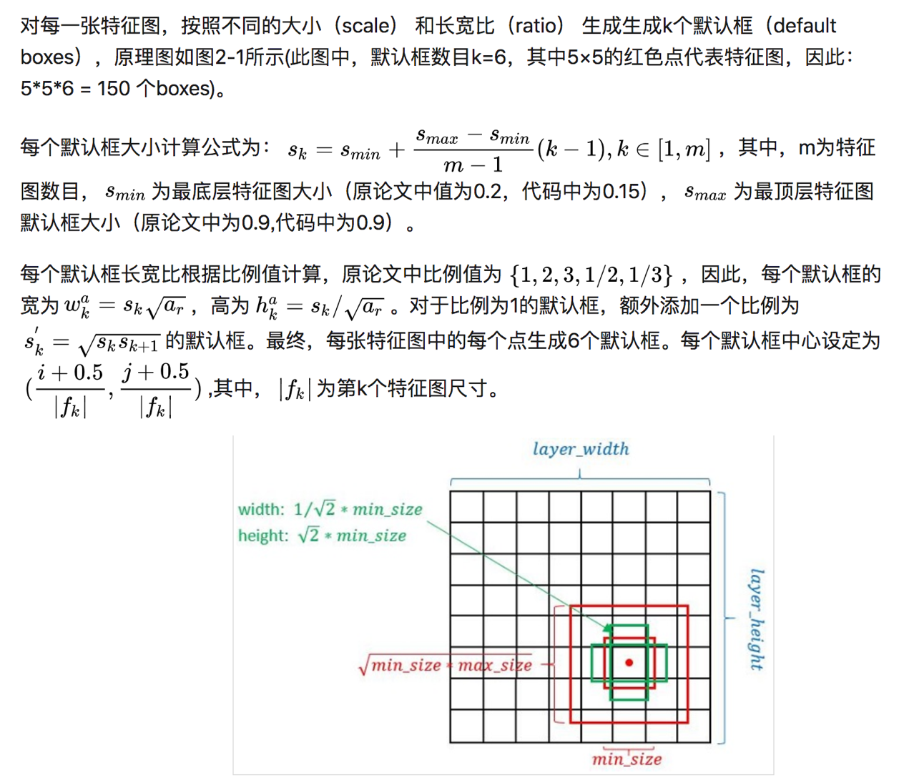
- ratio:长宽比
- 默认框的大小计算参数:s_min:最底层的特征图计算参数,s_max最顶层的特征图计算参数
1.4.2 localization与confidence
这两者的意义如下,主要作用用来过滤,训练
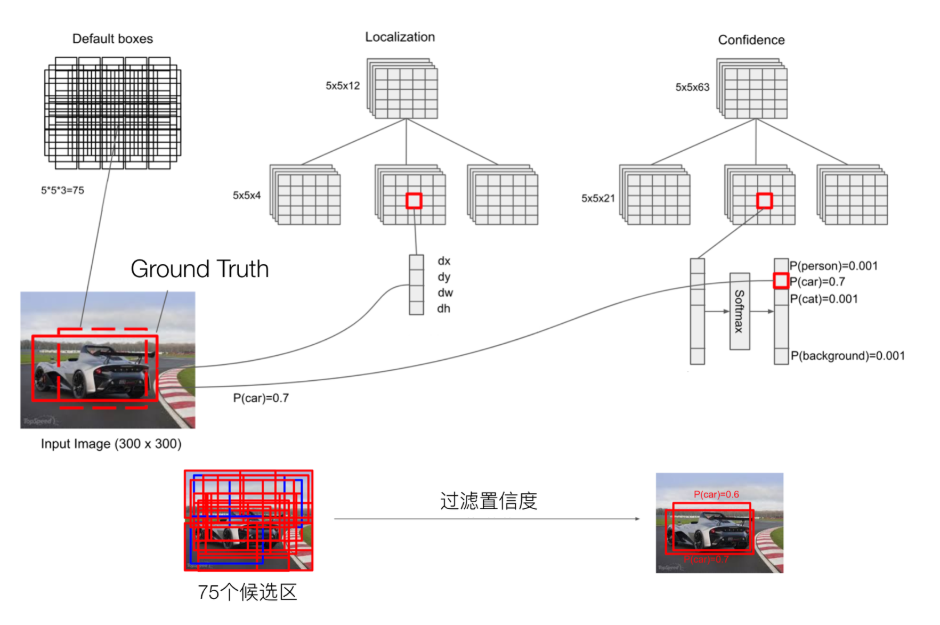
经过这一次过滤操作,会将候选框筛选出数量较少的prior boxes。
关于三种boxes的解释区别:
- gournd truth boxes:训练集中,标注好的待检测类别的的位置,即真实的位置,目标的左下角和右上角坐标
- default boxes:在feature map上每一个点上生成的某一类别图片的位置。feature map每个点生成4或6个box(数量是事先指定的),格式为转换过后的(x, y, w, h)
- prior boxes:经过置信度阈值筛选后,剩下的可能性高的boxes。这个box才是会被真正去做回归
也就是说SSD中提供事先计算好的候选框这样的机制,只不过不需要再像RPN那种筛选调整,
而是直接经过prior boxes之后做回归操作(因为confidence中提供了21个类别概率可以筛选出背景)
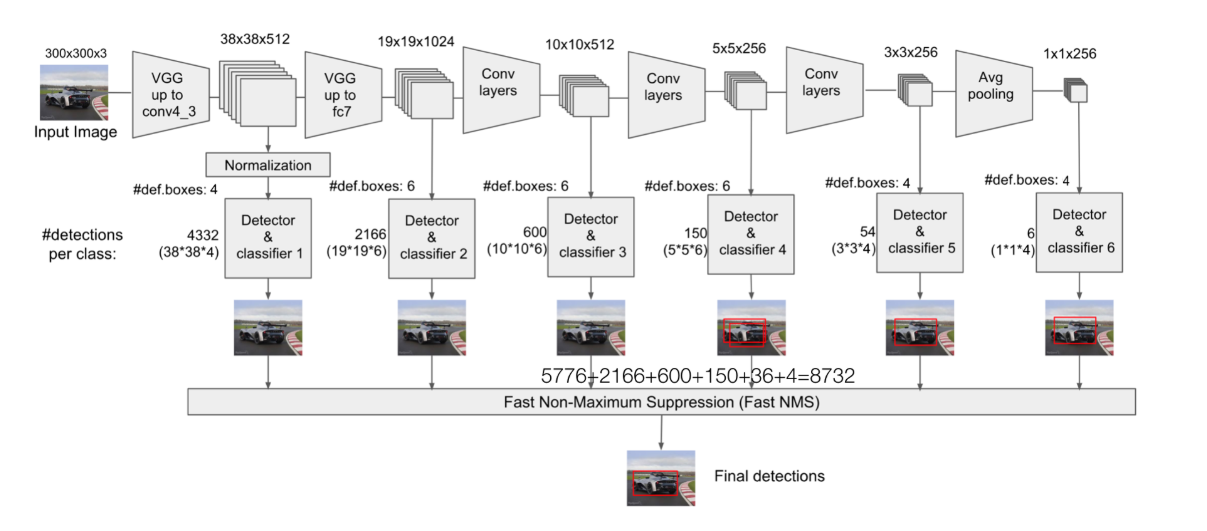
问题:SSD中的多个Detector & classifier有什么作用?
SSD的核心是在不同尺度的特征图上来进行Detector & classifier 容易使得SSD观察到更小的物体
2 训练与测试流程
2.1 train流程
- 输入->输出->结果与ground truth标记样本回归损失计算->反向传播, 更新权值
1. 样本标记:
利用anchor与对应的ground truth进行标记正负样本,每次并不训练8732张计算好的default boxes, 先进行置信度筛选,并且训练指定的正样本和负样本, 如下规则
正样本
- 1.与GT重合最高的boxes, 其输出对应label设为对应物体.
- 2.物体GT与anchor iou满足大于0.5
负样本:其它的样本标记为负样本
在训练时, default boxes按照正负样本控制positive:negative=1:3
3. 损失
网络输出预测的predict box与ground truth回归变换之间的损失计算, 置信度是采用 Softmax Loss(Faster R-CNN是log loss),位置回归则是采用 Smooth L1 loss (与Faster R-CNN一样)
2.2 test流程
- 输入->输出->nms->输出
3 比较
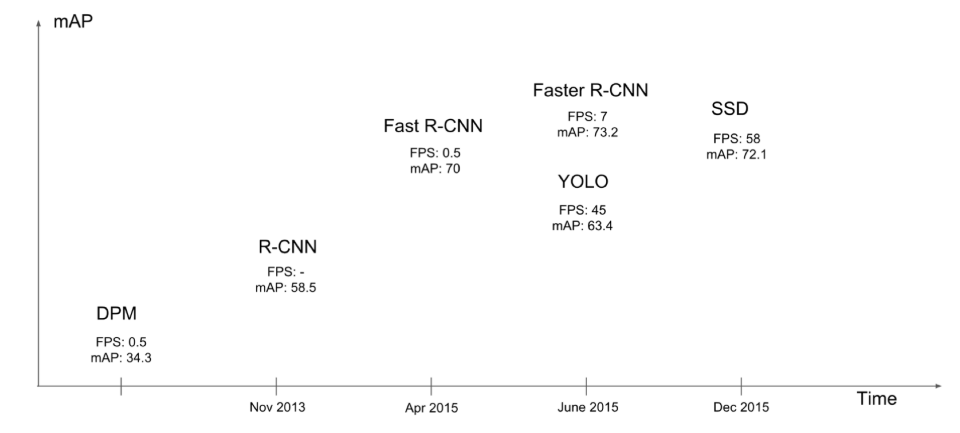
从图中看出SSD算法有较高的准确率和性能,兼顾了速度和精度
4 总结
- SSD的结构
- Detector & classifier的组成部分以及作用
- SSD的训练样本标记
- GT与default boxes的格式转换过程
(七)目标检测算法之SSD的更多相关文章
- 基于深度学习的目标检测算法:SSD——常见的目标检测算法
from:https://blog.csdn.net/u013989576/article/details/73439202 问题引入: 目前,常见的目标检测算法,如Faster R-CNN,存在着速 ...
- AI SSD目标检测算法
Single Shot multibox Detector,简称SSD,是一种目标检测算法. Single Shot意味着SSD属于one stage方法,multibox表示多框预测. CNN 多尺 ...
- 目标检测算法SSD之训练自己的数据集
目标检测算法SSD之训练自己的数据集 prerequesties 预备知识/前提条件 下载和配置了最新SSD代码 git clone https://github.com/weiliu89/caffe ...
- 深度学习 目标检测算法 SSD 论文简介
深度学习 目标检测算法 SSD 论文简介 一.论文简介: ECCV-2016 Paper:https://arxiv.org/pdf/1512.02325v5.pdf Slides:http://w ...
- 目标检测算法SSD在window环境下GPU配置训练自己的数据集
由于最近想试一下牛掰的目标检测算法SSD.于是乎,自己做了几千张数据(实际只有几百张,利用数据扩充算法比如镜像,噪声,切割,旋转等扩充到了几千张,其实还是很不够).于是在网上找了相关的介绍,自己处理数 ...
- 深度学习笔记之目标检测算法系列(包括RCNN、Fast RCNN、Faster RCNN和SSD)
不多说,直接上干货! 本文一系列目标检测算法:RCNN, Fast RCNN, Faster RCNN代表当下目标检测的前沿水平,在github都给出了基于Caffe的源码. • RCNN RCN ...
- 目标检测算法的总结(R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD、FNP、ALEXnet、RetianNet、VGG Net-16)
目标检测解决的是计算机视觉任务的基本问题:即What objects are where?图像中有什么目标,在哪里?这意味着,我们不仅要用算法判断图片中是不是要检测的目标, 还要在图片中标记出它的位置 ...
- 如何使用 pytorch 实现 SSD 目标检测算法
前言 SSD 的全称是 Single Shot MultiBox Detector,它和 YOLO 一样,是 One-Stage 目标检测算法中的一种.由于是单阶段的算法,不需要产生所谓的候选区域,所 ...
- 基于候选区域的深度学习目标检测算法R-CNN,Fast R-CNN,Faster R-CNN
参考文献 [1]Rich feature hierarchies for accurate object detection and semantic segmentation [2]Fast R-C ...
随机推荐
- python 小兵(4)之文件操作
文件操作 初始文件操作 使用Python来读写文件是非常简单的操作,我们使用open()函数来打开一个文件,获取到文件句柄,然后通过文件句柄就可以进行各种各样的操作了 根据打开方式的不同能够执行的操作 ...
- [论文][半监督语义分割]Adversarial Learning for Semi-Supervised Semantic Segmentation
Adversarial Learning for Semi-Supervised Semantic Segmentation 论文原文 摘要 创新点:我们提出了一种使用对抗网络进行半监督语义分割的方法 ...
- SpringBoot+MyBatis通过ScriptRunner读取SQL文件
@Component public class InitDBTables implements CommandLineRunner { @Autowired DataSource dataSource ...
- 分布式系统及CAP理论
一.集中式系统 在学习分布式之前,先了解一下与之相对应的集中式系统是什么样的. 集中式系统用一句话概括就是:一个主机带多个终端.终端没有数据处理能力,仅负责数据的录入和输出.而运算.存储等全部在主机上 ...
- pageX的兼容性处理1
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- python 异常捕捉总结
Process finished with exit code -1 错误 执行代码 pycharm2020.1中手动中断程序,可是却捕捉不了中断异常,并且输出Process finished wit ...
- 详解 Apache SkyWalking OAP 的分布式计算
SkyWalking的OAP(Observability Analysis Platform,观测分析平台)是一个用于链路数据的分布式计算系统. 因为它巧妙的设计,使得在链路数据计算和聚合过程中,不需 ...
- .NET 云原生架构师训练营(权限系统 代码实现 WebApplication)--学习笔记
目录 开发任务 代码实现 开发任务 DotNetNB.Security.Core:定义 core,models,Istore:实现 default memory store DotNetNB.WebA ...
- Devops 开发运维高级篇之Jenkins+Docker+SpringCloud微服务持续集成(上)
Devops 开发运维高级篇之Jenkins+Docker+SpringCloud微服务持续集成(上) Jenkins+Docker+SpringCloud持续集成流程说明 大致流程说明: 1) 开发 ...
- logstash根据日志关键词报警
logstash是可以根据日志级别,日志类型进行报警通知的. 这次精简教程,排除filebeat自带的#include_lines: ['^ERR', '^WARN']写法,直接使用logstash报 ...