MM32F0020 UART1中断接收
目录:
1.MM32F0020简介
2.初始化MM32F0020 UART1和NVIC中断
3.编写MM32F0020 UART1中断接收函数
4.编写MM32F0020 UART1发送字节和ASCII字符函数
5.编写MM32F0020 UART1处理中断接收到的数据函数
6.MM32F0020 UART1发送UART1中断接收到的数据到上位机串口助手
提要:
学习MM32F0020 UART1中断接收数据,通过上位机串口助手发送8字节的十六进制数据:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55;下位机MM32F0020的UART1中断接收到一帧:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55 共8字节数据后,通过UART1发送多字节函数,原样发送到串口助手显示出来。
内容:
1、MM32F0020简介:
(1)MM32F0020微控制器是基于Arm Cortex-M0内核,最高工作频率可达48MHz;
(2)供电电压支持:2.0V - 5.5V;
(3)多达32KB的Flash,2KB的SRAM;
(4)1个I2C;
(5)2个UART;
(6)1个12位的ADC;
(7)1个I2C或I2S;
(8)1个高级定时,1个通用定时器,1个基本定时器。
2.初始化MM32F0020 UART1和NVIC中断:
MM32F0020 UART1的GPIO初始化,根据MM32F0020的DS数据手册选择PA12:UART1_TX,PA3:UART1_RX做为UART1的发送和接收数据的引脚,具体配置步骤,及其初始化如下所示:
(1)使能GPIOA外设时钟;
(2)配置IO的管脚;
(3)配置GPIO的输出速度;
(4)配置IO管脚的工作模式;
(5)根据GPIOA配置的参数整体初始化GPIO各管脚的成员参数。
void Bsp_UART1_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOA, ENABLE);
//UART initialset
GPIO_PinAFConfig(GPIOA, GPIO_PinSource3, GPIO_AF_1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource12, GPIO_AF_1); //UART1_TX GPIOA.12
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct); //UART1_RX GPIOA.3
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
MM32F0020 UART1和NVIC中断优先级初始化,具体配置步骤,及其初始化如下所示:
(1)使能UART1外设时钟;
(2)调用之前配置的UART1GPIO初始化函数;
(3)调配置UART1通信波特率为115200;
(4)配置UART1字长为8位;
(5)配置UART1收发数据为1位停止位;
(6)配置UART1收发数据为无奇偶校验位;
(7)配置UART1允许串口收发数据;
(8)根据以上配置参数初始化UART1结构体成员;
(9)使能UART1中断接收功能;
(10)配置UART1的NVIC中断优先级为0,并使能和初始化NVIC中断(优先级为0-3均可,参数越小优先级越高)。
根据以上配置参数,则UART1初始化代码如下所示:
void Bsp_UART1_NVIC_Init(u32 baudrate)
{
UART_InitTypeDef UART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1ENR_UART1, ENABLE); Bsp_UART1_GPIO_Init();
UART_StructInit(&UART_InitStruct);
UART_InitStruct.BaudRate = baudrate;
//The word length is in 8-bit data format.
UART_InitStruct.WordLength = UART_WordLength_8b;
UART_InitStruct.StopBits = UART_StopBits_1;
//No even check bit.
UART_InitStruct.Parity = UART_Parity_No;
//No hardware data flow control.
UART_InitStruct.HWFlowControl = UART_HWFlowControl_None;
UART_InitStruct.Mode = UART_Mode_Rx | UART_Mode_Tx;
UART_Init(UART1, &UART_InitStruct); UART_ITConfig( UART1,UART_IT_RXIEN, ENABLE); //UART1 NVIC
NVIC_InitStruct.NVIC_IRQChannel = UART1_IRQn;
//UART1 Priority
NVIC_InitStruct.NVIC_IRQChannelPriority = 0;
//Enable UART1_IRQn
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(& NVIC_InitStruct); UART_Cmd(UART1, ENABLE);
}
3.编写MM32F0020 UART1中断接收函数:
(1)定义UART1接收和发送数据相关的的缓存,变量如下所示:
//UART1 Recv Buffer
u8 gUART1_Rx_Buf[UART1_RXD_LEN];
//UART1 Recv Count
u16 gUART1_Rx_Cnt;
//UART1 Recv Timing Count
u8 gUART1_Rx_TimeCnt = 0;
//UART1 Recv Flag
bool gUART1_Rx_Flag = false;
(2)头文件声明与UART1接收和发送相关的宏,缓存、变量以及函数声明,如下所示:
//UART1 Baudrate
#define UART1_BAUDRATE (115200)
//UART1 Recv length
#define UART1_RXD_LEN (200) //UART1 Recv Buffer
extern u8 gUART1_Rx_Buf[UART1_RXD_LEN];
//UART1 Recv Count
extern u16 gUART1_Rx_Cnt;
//UART1 Recv Timing Count
extern u8 gUART1_Rx_TimeCnt;
//UART1 Recv Flag
extern bool gUART1_Rx_Flag; //UART1 NVIC Init
void Bsp_UART1_NVIC_Init(u32 baudrate);
//Process UART1 Recv Task
void Bsp_UART1_Recv_Task(void);
//UART sends a byte data
void Bsp_UART_SendByte(UART_TypeDef* uart,u8 data);
//Send ASCII characters
void Bsp_UART_SendASCII(UART_TypeDef* uart,char *str);
//UART sends multi-byte data
void Bsp_UART_SendBytes(UART_TypeDef* uart,u8 *buf, u16 len);
(3)编写UART1中断接收数据函数,如下所示:
void UART1_IRQHandler(void)
{
u8 Recv; //Check receive status
if(UART_GetITStatus(UART1, UART_IT_RXIEN) == SET)
{
UART_ClearITPendingBit(UART1, UART_IT_RXIEN); Recv = UART_ReceiveData(UART1); gUART1_Rx_Buf[gUART1_Rx_Cnt] = Recv; if(gUART1_Rx_Cnt < UART1_RXD_LEN-1)
{
gUART1_Rx_Cnt++;
}
else
{
gUART1_Rx_Cnt = 0;
}
if(gUART1_Rx_Cnt >= 8)
{
gUART1_Rx_Flag = true;
}
}
}
4.编写MM32F0020 UART1发送字节和ASCII字符函数:
(1)MM32F0020 UART1发送字节函数如下所示:
void Bsp_UART_SendByte(UART_TypeDef* uart,u8 data)
{
UART_SendData(uart,data);
while(!UART_GetFlagStatus(uart, UART_FLAG_TXEPT));
}
(2)MM32F0020 UART1发送多字节函数如下所示:
void Bsp_UART_SendBytes(UART_TypeDef* uart,u8 *buf, u16 len)
{
while(len--)
{
Bsp_UART_SendByte(uart,*buf++);
}
}
(3)MM32F0020 UART1发送ASCII字符串函数如下所示:
void Bsp_UART_SendASCII(UART_TypeDef* uart,char *str)
{
while(*str)
{
Bsp_UART_SendByte(uart,*str++);
}
}
5.编写MM32F0020 UART1处理中断接收到的数据函数:
MM32F0020 UART1处理中断接收到的数据函数如下所示,当上位机串口助手发送8字节的十六进制数据:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55;下位机MM32F0020的UART1中断接收到一帧:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55 共8字节数据后,通过UART1发送多字节函数,原样发送到串口助手。
void Bsp_UART1_Recv_Task(void)
{
//UART1 Rx Flag
if(gUART1_Rx_Flag == true)
{
gUART1_Rx_Flag = false; if((gUART1_Rx_Buf[0] == 0xAA) && (gUART1_Rx_Buf[1] == 0x01) && (gUART1_Rx_Buf[2] == 0x02) && (gUART1_Rx_Buf[3] == 0x03) && \
(gUART1_Rx_Buf[4] == 0x04) && (gUART1_Rx_Buf[5] == 0x05) && (gUART1_Rx_Buf[6] == 0x06) && (gUART1_Rx_Buf[7] == 0x55))
{
Bsp_UART_SendBytes(UART1,gUART1_Rx_Buf,gUART1_Rx_Cnt);
}
gUART1_Rx_Cnt = 0;
memset(gUART1_Rx_Buf,0,sizeof(gUART1_Rx_Buf));
}
}
6.MM32F0020 UART1发送UART1中断接收到的数据到上位机串口助手:
当上位机串口助手发送8字节的十六进制数据:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55;下位机MM32F0020的UART1中断接收到一帧:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55 共8字节数据后,通过UART1发送多字节函数,原样发送到串口助手。
(1)在main函数中调用UART1 NVIC初始化函数;
(2)在main函数的while(1)主循环中调用UART1处理中断接收到的数据函数,循环检测UART1的接收中断是否接收到上位机串口助手下发的数据,如有收到就原样发送到上位机串口助手上显示出来;
int main(void)
{
//UART1 NVIC Init Baudrate 115200
Bsp_UART1_NVIC_Init(UART1_BAUDRATE); while(1)
{
//Process UART1 Recv Task
Bsp_UART1_Recv_Task();
}
}
(3)上位机串口助手发送8字节16进制数据:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55,下位机MM32F0020 UART1中断接收到一帧数据后原样把接收到的数据发送到上位机上显示出来,如下图1所示:
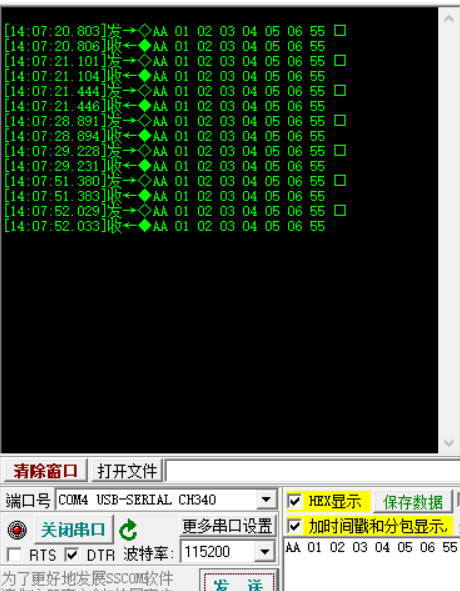
图1
总结:
学习MM32F0020 UART1中断接收数据,通过上位机串口助手发送8字节的十六进制数据:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55;下位机MM32F0020的UART1中断接收到一帧:0xAA,0x01,0x02,0x03,0x04,0x05,0x06,0x55 共8字节数据后,通过UART1发送多字节函数,原样发送到串口助手显示出来。
注意事项:
(1)MM32F0020每个外设都有自己独立的时钟,需使能UART1 发送和接收引脚的GPIO时钟;
(2)使能UART1外设时钟;
(3)使能UART1接收中断;
(4)使能UART1 NVIC中断;
(5)UART2的操作方法与UART1的方法一样,可参考以上UART1把对应的UART1参数改成UART2,使能相应外设时钟即可。
MM32F0020 UART1中断接收的更多相关文章
- MM32F0020 UART1中断接收和UART1中断发送
目录: 1.MM32F0020简介 2.初始化MM32F0020 UART1和NVIC中断 3.编写MM32F0020 UART1使能中断发送函数 4.编写MM32F0020 UART1中断接收和中断 ...
- MM32F0140 UART1中断接收和UART1中断发送
目录: 1.MM32F0140简介 2.初始化MM32F0140 UART1和NVIC中断 3.编写MM32F0140 UART1使能中断发送函数 4.编写MM32F0140 UART1中断接收和中断 ...
- MM32F0020 UART1空闲中断接收
目录: 1.MM32F0020简介 2.初始化MM32F0020 UART1空闲中断和NVIC中断 3.编写MM32F0020 UART1中断接收和空闲中断函数 4.编写MM32F0020 UART1 ...
- MM32F0020 UART1硬件自动波特率的使用
目录: 1.MM32F0020简介 2.UART自动波特率校准应用场景 3.MM32F0020 UART自动波特率校准原理简介 4.MM32F0020 UART1 NVIC硬件自动波特率配置以及初始化 ...
- MM32F0140 UART1空闲中断接收
目录: 1.MM32F0140简介 2.初始化MM32F0140 UART1空闲中断和NVIC中断 3.编写MM32F0140 UART1中断接收和空闲中断函数 4.编写MM32F0140 UART1 ...
- 灵动微电子ARM Cortex M0 MM32F0010 UART1和UART2中断接收数据
灵动微电子ARM Cortex M0 MM32F0010 UART1和UART2中断接收数据 目录: 1.MM32F0010UART简介 2.MM32F0010UART特性 3.MM32F0010使用 ...
- MM32F0140 UART1 DMA RX and TX 中断接收和发送数据
目录: 1.MM32F0140简介 2.DMA工作原理简介 3.初始化MM32F0140 UART1 4.配置MM32F0140 UART1 DMA接收 5.配置MM32F0140 UART1 DMA ...
- 基于STM8的UART发送和中断接收---STM8-第二章
1. 综述 UART的基础知识,通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),通常称作UART,是一种异步收发传输器. 做软件开发的人都 ...
- STM32F10x_硬件I2C主从通信(轮询发送,中断接收)
Ⅰ.写在前面 关注我分享文章的朋友应该知道我在前面讲述过(软件.硬件)I2C主机控制从机EEPROM的例子.在I2C通信主机控制程序是比较常见的一种,可以说在实际项目中,很多应用都会使用到I2C通信. ...
随机推荐
- Hadoop支持LZO
0. 环境准备 maven(下载安装,配置环境变量,修改sitting.xml加阿里云镜像)gcc-c++zlib-develautoconfautomakelibtool通过yum安装即可 yum ...
- ApacheCN C# 译文集 20211124 更新
C# 代码整洁指南 零.前言 一.C# 代码标准和原则 二.代码审查--过程和重要性 三.类.对象和数据结构 四.编写整洁的函数 五.异常处理 六.单元测试 七.端到端系统测试 八.线程和并发 九.设 ...
- resp.getWriter().print(categoryList)、resp.getWriter().write(String)与new ObjectMapper().writeValue(resp.getOutputStream(),categoryList)的区别
前言:最近在复习原生的servlet的时候,对其输出流不理解,故总结一下: resp.getWriter().print(categoryList) 可以输出字符串,也可以输出对象,可能还有其他类型, ...
- Docker入门 安装 基础操作命令
Docker 学习来源 https://www.bilibili.com/video/av26993050/?spm_id_from=333.788.b_636f6d6d656e74.20 https ...
- 理解Laravel中的pipeline
理解Laravel中的pipeline suoga 关注 0.1 2015.09.08 00:00* 字数 1533 阅读 7151评论 8喜欢 24 pipeline在laravel的启动过程中出 ...
- 解决sublime代码不提示的问题
如果想让sublime在你输入标签的过程中给你提示,需要按要求开启以下功能. 1.开启代码自动提示功能
- js获取 url?后面的参数取值
function GetRequest() { var url = location.search; //获取url中"?"符后的字串 var theRequest ...
- Spark算子 - aggregateByKey
释义 aggregateByKey逻辑类似 aggregate,但 aggregateByKey针对的是PairRDD,即键值对 RDD,所以返回结果也是 PairRDD,结果形式为:(各个Key, ...
- 读写分离&分库分表学习笔记
读写分离 何为读写分离? 见名思意,根据读写分离的名字,我们就可以知道:读写分离主要是为了将对数据库的读写操作分散到不同的数据库节点上. 这样的话,就能够小幅提升写性能,大幅提升读性能. 我简单画了一 ...
- 12、Linux基础--挂载磁盘步骤、流处理工具awk(正则 比较 逻辑 算数表达式 流程控制)
笔记 1.晨考 1.用两种方法,实现将文件中的以# 开头的行把# 去掉 sed -r 's/^#//g' /etc/fstab cat /etc/fstab | tr -d '^#' 2.将文件中的H ...