论文阅读:Visual-Inertial Localization With Prior LiDAR Map Constraints
介绍
提出了一个低代价双目视觉惯导定位系统,实现了基于多状态约束下的卡尔曼滤波器(MSCKF)VIO,采用了先验雷达地图。除了稀疏的视觉特征,雷达地图与半稠密的点云也通过紧耦合的MSCKF进行更新,进而可以纠正漂移。点云和视觉之间的跨模态限制对VIO系统有改善作用。
总之就是提出了VIO状态估计器,其中点云地图提供了先验,考虑到计算效率,采用MSCKF,实现在线定位,仅仅维护一个固定大小的窗口,优化IMU位姿,窗口中不保留特征。同时生成半稠密地图,产生视觉点云,该点云能在雷达地图中进行配准,结果作为相机位姿的全局测量,和视觉稀疏特征以及惯导测量进行紧融合。雷达地图先验通过和视觉半稠密点云以及NDT方法构建。纠正仅VIO偏差,提供6自由度的实时位姿估计。
视觉惯导状态估计
A.状态向量
估计的状态量见公式(1),主要包括全局参考系到第\(k\)时刻的IMU参考系之间的旋转量、陀螺仪和加速度计偏差、IMU在全局参考系下的位置(这个是不是可以代替平移)、速度、雷达地图和全局参考系之间的位姿变换(旋转+平移),以及一个大小为m帧图像的滑动窗口,维护的状态量是这k帧对应的IMU相对于世界的位姿变换。见公式(2)。状态偏差的定义见公式(3)。状态估计值通过估计值和偏差进行更新,见公式(4)。对于位置和速度更新时直接用加法,位姿量则需要使用四元数乘法。
B.状态传递
状态量和协方差的传递需要对IMU的线加速度和角速度使用IMU运动学进行预积分,见公式(6),参考了文献[30],EKF传递参考了[1]。
C.状态更新
通过将半密集点云与先验激光雷达地图进行配准,将得到一个具有协方差的配准姿态:
雷达地图约束:考虑时间\(k\)时左边相机在地图中的位姿,以该测量作为状态函数,可以通过map---global---IMU---相机求解。状态函数线性化以及雅克比矩阵的求解见式(9)-(16)。直接可以使用文献[31]中的EKF进行更新。
视觉特征测量:追踪一些稀疏的特征点,采用滑动窗口。如果特征丢失或者追踪时间过长,则三角化到地图点,并且采用BA优化。成功优化的特征点将通过马氏距离测试,并使用MSCKF更新。稀疏特征点提供短期定位,先验地图可以减小长期定位的漂移。
视觉处理
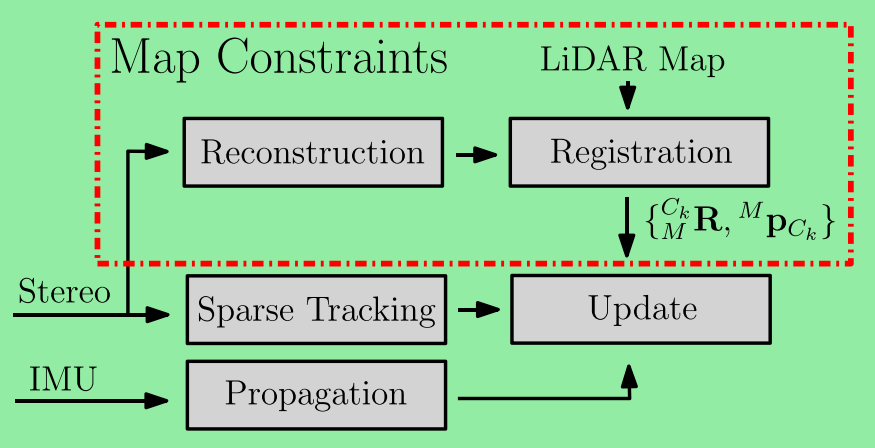
视觉处理过程主要包括两个方面:稀疏特征点的追踪以及与半稠密视觉点云与雷达地图的配准。这两个过程独立进行,双目构建半稠密点云,和先验雷达地图进行配准,并给出地图和camera之间的变换。
半稠密重建
作者发现对于雷达地图来说,使用视觉重建的点云与其进行陪准时,结构化的表面如平面的配准效果较好,而稀疏重建主要由边和角落对应的高梯度的点组成,因此作者使用半稠密重建,进行 配准。论文中选取一些关键帧进行重建,关键帧的选取主要看距离以及姿态变化大小,保证关键帧能覆盖较大的空间区域,且帧之间的重合区域较小,半稠密重建可以参考最近的神经网络方法,见文献[33]。使用窗口维护关键帧(增加约束,便于匹配),对于关键帧先使用双目块匹配计算深度图,即最小化SAD距离,与其他方法相比[34],[35],传统双目块匹配能保证计算效率,后面还要用其他关键帧进行深度优化。
深度对应匹配
在计算窗口中的关键帧已经通过MSCKF估计出位姿,将关键帧的深度图投影到其他的帧上,计算相似性。深度匹配过程如图4所示,将其他帧的点投到第k帧上,如果像素能匹配上,将点及其深度添加到观测集合上,对于每个要和\(j\)帧匹配的像素,都要做一个并存测试:
1)两个像素值小于某个阈值
2)两个像素处的梯度小于某个阈值
3)投影过来的深度值相差不能超过阈值
投影时像素位置需要离散化,为了减小误差,投影的是被投影点周围的2*2的块,如果像素块通过了测试,则将投影点以及深度加入集合\(P_j(u_n)\)上。对于窗口中的每个关键帧都进行该操作,使用观测到的信息对每一帧的点云进行优化,去除外点。如果某个像素的观测点太少,则被认为是外点,如果存在很多观测点,则深度取这些观测点的平均值,该方法使得点云的质量很高,噪声较少。
点云 Assembly
在对每一帧的深度估计进行约束后,需要将每一帧点云投影到当前帧上(参考帧),由于半稠密点云数量太多,作者采用了第二个线程,提供了先验雷达地图约束。只要三个关键帧的窗口,超过半米以及30度的位姿变化就可以很好地约束点云。
NDT点云配准
在参考帧中重建了半稠密点云后,和雷达地图进行配准。NDT方法既保证了精确度也有足够的效率。NDT使用高斯分布来模拟点云,作者采用了P2D方法,实现了源点云到目标点云的配准,求出相对位姿,优化函数见公式(22)。Hessian矩阵的求解见M. Magnusson 的博士论文61页。注意PCL库中的P2D函数使用欧拉角表示姿态,作者使用了四元数参数,需要一个协方差矩阵进行误差状态传递时的转换。
为了降低噪声的影响,文中还采用了以下策略:
1)在计算NDT的Hessian矩阵后,计算其最小特征值,保证其大于一定阈值
2)公式(22)的优化函数代价值小于一定阈值
3)NDT集合中内点与源点云内点的比例反映了配准的质量,应该接近于1(这里源点云是不是应该是重建生成的点云)
4)最终的雷达地图先验约束会进行马氏距离测试处理。
未来工作
考虑雷达地图不确定性,将视觉半稠密地图用于更新雷达先验地图。
A
Assembly 怎么翻译
马氏距离测试是什么?基于马氏距离的异常值检测?
点云地图变化不大,视觉特征地图变化大(光照等)
公式(2)上面which do not evolve over time and are used during feature update:
点云也更新么? 深度需要 通过匹配优化
论文阅读:Visual-Inertial Localization With Prior LiDAR Map Constraints的更多相关文章
- 论文阅读——Visual inertial odometry using coupled nonlinear optimization
简介:论文提出一种新的视觉里程计算法,其直接利用带噪声的IMU数据和视觉特征位置来优化相机位姿.不同于对IMU和视觉数据运行分离的滤波器,这种算法将它们纳入联合的非线性优化框架中.视觉特征的透视重投影 ...
- YOLO 论文阅读
YOLO(You Only Look Once)是一个流行的目标检测方法,和Faster RCNN等state of the art方法比起来,主打检测速度快.截止到目前为止(2017年2月初),YO ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- 论文阅读笔记 - Mesos: A Platform for Fine-Grained ResourceSharing in the Data Center
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- 论文阅读笔记六:FCN:Fully Convolutional Networks for Semantic Segmentation(CVPR2015)
今天来看一看一个比较经典的语义分割网络,那就是FCN,全称如题,原英文论文网址:https://people.eecs.berkeley.edu/~jonlong/long_shelhamer_fcn ...
随机推荐
- 稀疏性如何为AI推理增加难度
稀疏性如何为AI推理增加难度 NVIDIA Ampere架构使数学运算加倍,以加速对各种神经网络的处理. 如果曾经玩过游戏Jenga,那么将有一些AI稀疏感. 玩家将木制积木交叉成一列.然后,每个玩家 ...
- Qt自定义信号槽的使用浅析+实例
1. Qt中自定义信号槽的使用 Qt框架提供的信号槽在某些特定场景下是无法满足我们的项目需求的,因此我们还设计自己需要的的信号和槽,使用connect()对自定义的信号槽进行连接. 如果想要使用自定义 ...
- robotframework用户关键字创建过程
robotframework是一个关键字驱动框架,核心在于关键字的应用.系统本身通过各种库自带了大量关键字,同时支持用户自定义关键字.关键字可以简单理解为各种处理数据的方法. 关键字区别与用户参数. ...
- 【NX二次开发】Block UI 指定矢量
属性说明 属性 类型 描述 常规 BlockID String 控件ID Enable Logical 是否可操作 Group ...
- JavaScript 中的延迟加载属性模式
传统上,开发人员在 JavaScript 类中为实例中可能需要的任何数据创建属性.对于在构造函数中随时可用的小块数据来说,这不是问题.但是,如果在实例中可用之前需要计算某些数据,您可能不想预先支付该费 ...
- 白日梦的MySQL专题(第38篇文章)8分钟回顾MySQL的索引
目录 公众号首发-推荐阅读原文-格式更好看 一.导读 二.聚簇索引 三.二级索引 四.联合索引 4.1.什么是联合索引 4.2.左前缀原则 4.3.联合索引的分组&排序 五.覆盖索引 六.倒排 ...
- Redis哨兵的配置和原理
哨兵 在一个典型的一主多从的Redis系统中,当主数据库遇到异常中断服务后,需要手动选择一个从数据库升级为主数据库,整个过程需要人工介入,难以自动化. Redis2.8提供了哨兵2.0(2.6提供了1 ...
- 【题解】Luogu P3123 [USACO15OPEN]贝茜说哞Bessie Goes Moo
Luogu P3123 [USACO15OPEN]贝茜说哞Bessie Goes Moo 题目描述 Farmer John and Bessie the cow love to exchange ma ...
- 学习Qt Charts-创建一个简单的折线图
一.Qt Charts Qt Charts是基于Qt Graphics View实现的一个图表的组件,可以用来在QT GUI程序中添加现在风格的.可交互的.以数据为中心的图表,可以用作QWidget或 ...
- 简聊DFA(确定性有限状态自动机)
状态机理论最初的发展在数字电路设计领域.而在软件设计领域,状态机设计的理论俨然已经自成一体. 状态机是软件编程中的一个重要概念,比这个概念更重要的是对它的灵活应用.在一个思路清晰而且高效的程序中,必然 ...