opencv笔记---contours
一 Contour Finding
Contours使用 STL-style vector<> 表示,如 vector<cv::Point>, vector<cv::Point2f>。opencv中,使用函数 cv::findContours() 寻找contours, 具体函数定义如下:
void cv::findContours(cv::InputOutputArray image,
cv::OutputArrayofArrays contours,
cv::OutputArray hierarchy,
int mode,
int method,
cv::Point offset = cv::Point());
void cv::findContours(cv::InputOutputArray image,
cv::OutputArrayofArrays contours,
int mode,
int method,
cv::Point offset = cv::Point());
参数 image 为8位单通道输入图像,一般情况下,该图像可能由 cv::threshold(), cv::adaptiveThreshold 生成。当 image 由 cv::Canny() 生成时,cv::findContours() 仅当边缘图像为宽度为1的细区域图像,对于闭合边缘,可以使用内边缘或者外边缘代替边缘图像进行后续分析;但对于非闭合边缘,个人认为 cv::Canny() 生成的边缘图像不适合使用 cv::findContours() 进行查找;替代方案是使用边缘跟踪算法,将 cv::Canny() 生成边缘保存在 vector<cv::Point> 中,然后使用 Contours 相关分析进行更多分析。
参数 contours 为 vector<vector<cv::Point>>, vector<vector<cv::Point2f>>, 使用 array of arrays 结构可以同时保存多条 contours。
参数 hierarchy 为 vector<cv::Vec4i>, 每个元素对应一个 contour, 元素中4个整数表示该 contour 与其他 contour 之间的关系,具体关系如下:
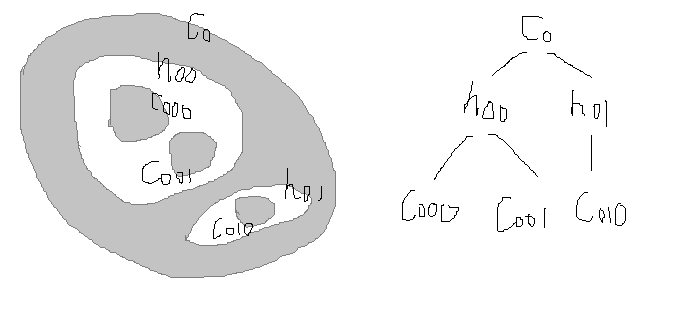
其中, c 表示 contour, h 表示 hole.
opencv 如何生成 contour 的 hierarchy? 个人认为(暂时没有研究 opencv 具体实现),一种可行的思路是使用区域增长,大概流程如下:
1)将种子点设置在图像边角处,使用背景颜色进行区域增长,区域增长在前景处停止;
2)使用形态学算子对当前增长后区域进行 dilate 操作,使 c0, c1,... 层级上的 contours 包含在当前增长区域中;
3)继续使用前景对图像增长,将 h00, h01,..., h10, h11,... 等层级上的 contours 包含在当前增长区域中;
4)如此循环,即可生成 contour 的 hierarchy 结构。
要使用 vector<cv::Vec4i> 表示 以上树形结构,每个 cv::Vec4i 元素值含义如下:
1) index 0: next contour(same level);
2) index 1: privous contour(same level);
3) index 2: first child(next level down);
4) index 3: parent(next level up);
参数 mode 表示如何提取 contours, 具体如下:
1) cv::PETR_EXTERNAL: 仅提取最外层 contour, 在以上图例中,仅提取 c0;
2) cv::PETR_LIST: 提取所有 contours, 组成链表结构,在图例中为: c010->c001->c000->h01->h00->c0;
3) cv::PETR_CCOMP: 提取所有 contours, 根据类型组成 hole list 和 contour list, 在图例中为:c010->c001->c000->c0, h01->h00, c0->h01(此处将前两个链表连接起来);
4) cv::PETR_TREE: 提取所有 contours, 建立树形结构。
参数 method 对 contour 压缩,以减少数据量,包括:
1) cv::CHAIN_APPROX_NONE: 不做任何压缩;
2) cv::CHAIN_APPROX_SIMPLE: 压缩水平,垂直,对角方向上的线段;
4) cv::CHAIN_APPROX_TC89_L1/cv::CHAIN_APPROX_TC89_KCOS: 使用曲线曲率信息做更复杂的压缩。
参数 offset 将 contour 平移,在使用ROI进行 contour 提取时, 通过设置不同 offset 可以很方便的将 contour 绘制在原图上。
二 Contour Drawing
使用 cv::drawContours() 在图像上绘制 contours, 具体定义如下:
void cv::drawContours(cv::InputOutputArray image,
cv::InputArrayofArrays contours,
int contourIdx,
const cv::Scalar& color,
int thickness = 1,
int lineType = 8,
cv::InputArray hierarchy = noArray(),
int maxLevel = INT_MAX(),
cv::Point offset = cv::Point());
参数 image 为需要绘制 contours 图像。
参数 contours 为 cv::findContours() 生成。
参数 contourIdx 选择需要绘制的 contour, 如果其值为 -1, 则绘制所有 contours。
参数 color thickness lineType 分别定义线条颜色,线条宽度,线条类型(4连接 cv::LINE_4, 8连接 cv::LINE_8, 反走样cv::LINE_AA)。
参数 hierarchy maxLevel 共同控制 contours 层级。
参数 offset 表示绘制时平移值。
三 Contour Operation
1 cv::approxPolyDP() 对 contour 进行多边形近似,具体定义如下:
void cv::approxPolyDP(cv::InputArray curve, cv::OutputArray approxCurve, double epsilon, bool closed);
参数 curve 可以是 vector<cv::Point>, vector<cv::Point2f> 或者 arrays of size N*2, arrays of size N*1 with 2 channels。
参数 epsilon 表示近似精度,一般通过 contour 长度的百分比计算得出。
参数 closed 表示 contour 是否闭合。
cv::approxPolyDP() 函数使用 Douglas-Peucker approximation,基本思路如下:
1)在 contour 上寻找距离最大的两个点,将 contour 一分为二, 并连接两点构成线段S;
2) 在两个半边缘上分别寻找到到线段S上的最远点,将半边缘一分为二,连接以上四个点形成四边形;
3)继续寻找到四边形各条边上的最远点,构成多边形,知道最远点到对应边上距离小于epsilon停止。
2 double cv::arcLength(cv::InputArrray points, bool closed) 求 contour 长度。
3 double cv::contourArea(cv::InputArray points, bool oriented = false) 使用格林公式求 contour 所围成的面积,oriented = true 时返回带符号面积值,该函数对复杂区域(如自交区域)将返回错误结果。
4 cv::Rect cv::boundingRect(cv::InputArray points) 求 contour 所围成的矩形(无旋转矩形)。
5 cv::RotateRect cv::minAreaRect(cv::InputArray points) 求 contour 所围成的最小矩形(旋转矩形)。
6 void cv::minEnclosingCircle(cv::InputArray points, cv::Point2f& center, float& radius) 求 contour 所围成的最小圆形。
7 cv::RotateRect cv::fitEllipse(cv::InputArray points) 使用 contour 拟合椭圆(使用最小化代价函数)。
8 cv::fitLine() 拟合直线,具体定义如下:
void cv::fitLine(cv::InputArray points, cv::OutputArray line, int distType, double param, double reps, double aeps);
参数 points 接受二维或者三维点,拟合成二维平面直线或者三维空间直线。
参数 line 为 vec4f 或者 vec6f, 前两个(或三个)元素给出直线方向,后两个(或三个)给出直线上一个点。
参数 distType 表示距离度量范数,一般使用cv::DIST_L2, cv::DIST_L1。
参数 reps aeps 表示直线方向与直线点的计算精度,一般赋值为 .01 即可。
9 void cv::convexHull(cv::InputArray points, cv::OutputArray hull, bool clockwise = false, bool returnPoints = true) 计算 contour 凸包,凸包点集计算比较简单。
10 bool cv::isContourConvex(cv::InputArray contour) 判断 contour 凸性。
11 double cv::pointPolygonTest(cv::InputArray contour, cv::Point2f pt, bool measureDist) 判断点是否在 contour 中,如果 measureDist = true, 返回点到最近边缘距离。
参考资料 Learning OpenCV 3 Adrian Kaehler & Gary Bradski
opencv笔记---contours的更多相关文章
- OpenCV笔记大集锦(转载)
整理了我所了解的有关OpenCV的学习笔记.原理分析.使用例程等相关的博文.排序不分先后,随机整理的.如果有好的资源,也欢迎介绍和分享. 1:OpenCV学习笔记 作者:CSDN数量:55篇博文网址: ...
- opencv笔记6:角点检测
time:2015年10月09日 星期五 23时11分58秒 # opencv笔记6:角点检测 update:从角点检测,学习图像的特征,这是后续图像跟踪.图像匹配的基础. 角点检测是什么鬼?前面一篇 ...
- opencv笔记5:频域和空域的一点理解
time:2015年10月06日 星期二 12时14分51秒 # opencv笔记5:频域和空域的一点理解 空间域和频率域 傅立叶变换是f(t)乘以正弦项的展开,正弦项的频率由u(其实是miu)的值决 ...
- opencv笔记4:模板运算和常见滤波操作
time:2015年10月04日 星期日 00时00分27秒 # opencv笔记4:模板运算和常见滤波操作 这一篇主要是学习模板运算,了解各种模板运算的运算过程和分类,理论方面主要参考<图像工 ...
- opencv笔记3:trackbar简单使用
time:2015年 10月 03日 星期六 13:54:17 CST # opencv笔记3:trackbar简单使用 当需要测试某变量的一系列取值取值会产生什么结果时,适合用trackbar.看起 ...
- opencv笔记2:图像ROI
time:2015年 10月 03日 星期六 12:03:45 CST # opencv笔记2:图像ROI ROI ROI意思是Region Of Interests,感兴趣区域,是一个图中的一个子区 ...
- opencv笔记1:opencv的基本模块,以及环境搭建
opencv笔记1:opencv的基本模块,以及环境搭建 安装系统 使用fedora22-workstation-x86_64 安装opencv sudo dnf install opencv-dev ...
- opencv笔记--Active contours
Active Contours 也称作 Snake,通过定义封闭区域曲线的能量函数,并使其最小化得到最终曲线. Active Contours 被用作物体边界精确定位上,opencv 给出了一个实现, ...
- 查找并绘制轮廓[OpenCV 笔记XX]
好久没有更新了,原谅自己放了个假最近又在赶进度,所以...更新的内容是很靠后的第八章,因为最近工作要用就先跳了,后面会更新笔记编号...加油加油! 在二值图像中寻找轮廓 void cv::findCo ...
随机推荐
- 灵雀云Kube-OVN:基于OVN的开源Kubernetes网络实践
近日,灵雀云发布了基于OVN的Kubernetes网络组件Kube-OVN,并正式将其在Github上开源.Kube-OVN提供了大量目前Kubernetes不具备的网络功能,并在原有基础上进行增强. ...
- kafka学习笔记(六)kafka的controller模块
概述 今天我们主要看一下kafka的controller的代码,controller代码是kafka的非常重要的代码,需要我们深入学习.从某种意义上来说,它是kafka最核心的组件,一方面,他要为集群 ...
- BitMap算法知识笔记以及在大数据方向的使用
概述 所谓的BitMap算法就是位图算法,简单说就是用一个bit位来标记某个元素所对应的value,而key即是该元素,由于BitMap使用了bit位来存储数据,因此可以大大节省存储空间,这是很常用的 ...
- RHCSA 第四天
1.使用whereis 查找 locate命令 使用which查找whereis命令 使用locate查找rm命令 2.find命令使用: 使用find命令在当前路径下查找所有的普通文件 使用f ...
- JS定时器不可靠的原因及解决方案
前言 在工作中应用定时器的场景非常多,但你会发现有时候定时器好像并没有按照我们的预期去执行,比如我们常遇到的setTimeout(()=>{},0)它有时候并不是按我们预期的立马就执行.想要知道 ...
- Javascript中字符串常用方法
JavaScript字符串常用方法 (1)获取相应位置的字符(charAt()) var str="你好,小小鸟!" var s=str.charAt(1) //获取到索引为1的字 ...
- 【刷题-LeetCode】205. Isomorphic Strings
Isomorphic Strings Given two strings *s* and *t*, determine if they are isomorphic. Two strings are ...
- 【刷题-LeetCode】121 Best Time to Buy and Sell Stock
Best Time to Buy and Sell Stock Say you have an array for which the ith element is the price of a gi ...
- X-Y问题(X-Y problem)
X-Y Problem 什么是X-Y problem呢? 某人想要解决问题X 他认为Y可能是解决X问题的方法 但是他不知道Y怎么做 于是他去问别人Y应该怎么做 这就产生了一个X-Y problem 也 ...
- HBase之MinorCompact全程解析
转自:https://blog.csdn.net/u014297175/article/details/50456147 Compact作用 当MemStore超过阀值的时候,就要flush到HDFS ...