Matlab 摄像机标定+畸变校正
博客转载自:http://blog.csdn.net/Loser__Wang/article/details/51811347
本文目的在于记录如何使用MATLAB做摄像机标定,并通过opencv进行校正后的显示。
首先关于校正的基本知识通过OpenCV官网的介绍即可简单了解:
http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
对于摄像机我们所关心的主要参数为摄像机内参,以及几个畸变系数。上面的连接中后半部分也给了如何标定,然而OpenCV自带的标定程序稍显繁琐。因而在本文中我主推使用MATLAB的工具箱。下面让我们开始标定过程。
标定板
标定的最开始阶段最需要的肯定是标定板。两种方法,直接从opencv官网上能下载到:
http://docs.opencv.org/2.4/_downloads/pattern.png
{kind=link}
方法二:逼格满满(MATLAB)
J = (checkerboard(,,)>0.5);
figure, imshow(J);
采集数据
那么有了棋盘格之后自然是需要进行照片了。不多说,直接上程序。按q键即可保存图像,尽量把镜头的各个角度都覆盖好。
#include "opencv2/opencv.hpp"
#include <string>
#include <iostream> using namespace cv;
using namespace std; int main()
{
VideoCapture inputVideo();
//inputVideo.set(CV_CAP_PROP_FRAME_WIDTH, 320);
//inputVideo.set(CV_CAP_PROP_FRAME_HEIGHT, 240);
if (!inputVideo.isOpened())
{
cout << "Could not open the input video " << endl;
return -;
}
Mat frame;
string imgname;
int f = ;
while () //Show the image captured in the window and repeat
{
inputVideo >> frame; // read
if (frame.empty()) break; // check if at end
imshow("Camera", frame);
char key = waitKey();
if (key == )break;
if (key == 'q' || key == 'Q')
{
imgname = to_string(f++) + ".jpg";
imwrite(imgname, frame);
}
}
cout << "Finished writing" << endl;
return ;
}
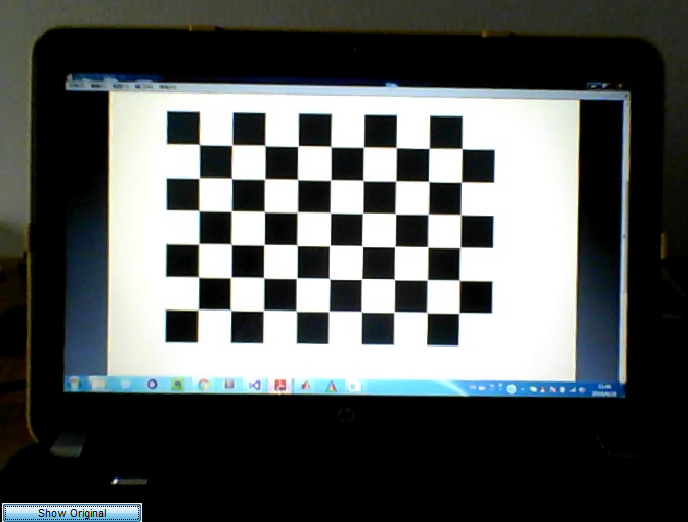
保存大约15到20张即可。大家可以看到我的方法,直接对着实验室的屏幕拍摄的。这个阶段有个注意事项就是测量好屏幕上每个方格的大小,这个标定的时候会用到。

进行标定
直接而在MATLAB的Command Window里面输入cameraCalibrator即可调用标定应用。

首先先把之前照好的图像添加进去,这是出现:

这就是之前让你记录的标定板中每个方格的大小。 输入无误后就涉及到最关键的一步了(MATLAB的这个实在太方便了,都是傻瓜式操作),选择参数。
为什么说他关键呢,因为如果你仔细阅读了OpenCV的说明之后你会大概明白畸变参数,总共有五个,径向畸变3个(k1,k2,k3)和切向畸变2个(p1,p2)。
径向畸变

切向畸变

以及在OpenCV中的畸变系数的排列(这点一定要注意k1,k2,p1,p2,k3),千万不要以为k是连着的。

并且通过实验表明,三个参数的时候由于k3所对应的非线性较为剧烈。估计的不好,容易产生极大的扭曲,所以我们在MATLAB中选择使用两参数,并且选择错切和桶形畸变。

点击开始后等待一段时间即可完成标定。并且MATLAB给出的可视化还是很不错的,可以对比校正前后的样子

点击show Undistorted即可看到无畸变的图像
到这为止,你已经完成了标定过程。选择导出参数,即可把参数进行保存。

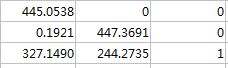
保存后可以退出标定应用,在MATLAB主界面中将保存的Mat文件打开
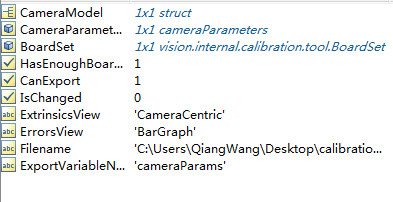
第二行就是参数
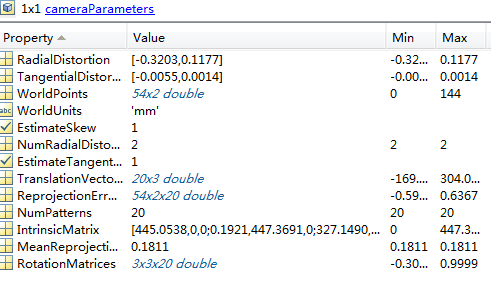
里面的RadialDistortion对应k1,k2,k3设置为0了。
TangentialDistortion对应p1,p2。
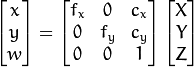
IntrinsicMatrix对应内参,注意这个和OpenCV中是转置的关系,注意不要搞错。
对应
OpenCV中查看标定的结果
#include "opencv2/opencv.hpp"
#include <iostream> using namespace cv;
using namespace std; int main()
{
VideoCapture inputVideo();
if (!inputVideo.isOpened())
{
cout << "Could not open the input video: " << endl;
return -;
}
Mat frame;
Mat frameCalibration; inputVideo >> frame;
Mat cameraMatrix = Mat::eye(, , CV_64F);
cameraMatrix.at<double>(, ) = 4.450537506243416e+02;
cameraMatrix.at<double>(, ) = 0.192095145445498;
cameraMatrix.at<double>(, ) = 3.271489590204837e+02;
cameraMatrix.at<double>(, ) = 4.473690628394497e+02;
cameraMatrix.at<double>(, ) = 2.442734958206504e+02; Mat distCoeffs = Mat::zeros(, , CV_64F);
distCoeffs.at<double>(, ) = -0.320311439187776;
distCoeffs.at<double>(, ) = 0.117708464407889;
distCoeffs.at<double>(, ) = -0.00548954846049678;
distCoeffs.at<double>(, ) = 0.00141925006352090;
distCoeffs.at<double>(, ) = ; Mat view, rview, map1, map2;
Size imageSize;
imageSize = frame.size();
initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(),
getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, , imageSize, ),
imageSize, CV_16SC2, map1, map2); while () //Show the image captured in the window and repeat
{
inputVideo >> frame; // read
if (frame.empty()) break; // check if at end
remap(frame, frameCalibration, map1, map2, INTER_LINEAR);
imshow("Origianl", frame);
imshow("Calibration", frameCalibration);
char key = waitKey();
if (key == || key == 'q' || key == 'Q')break;
}
return ;
}
修复之前和之后的结果对比

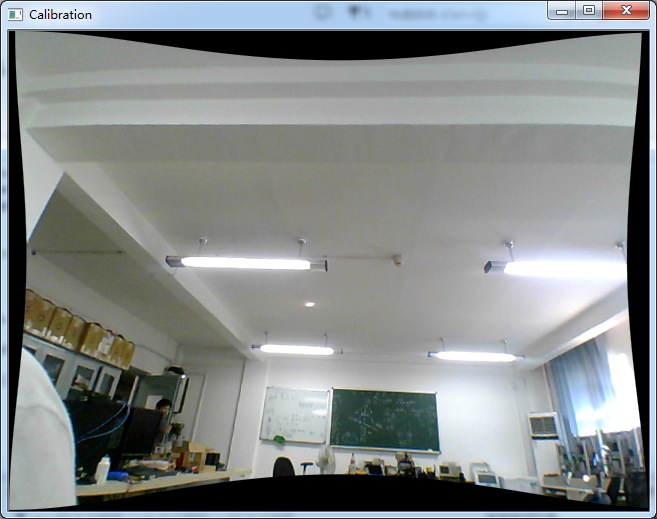
还有就是之前讨论的为什么选2系数而不是3系数。因为。。。。。。。 下面是三系数的修正结果,惨不忍睹啊
Matlab 摄像机标定+畸变校正的更多相关文章
- 【OpenCV】摄像机标定+畸变校正
摄像机标定 本文目的在于记录如何使用MATLAB做摄像机标定,并通过OpenCV进行校正后的显示. 首先关于校正的基本知识通过OpenCV官网的介绍即可简单了解: http://docs.open ...
- 利用matlab摄像机标定
(1)输入图像 "Image names"键 Matlab的图形窗口显示出20幅靶标图像 (2) 提取角点 "Extract grid corners"键. 输 ...
- OpenCV畸变校正源代码分析
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包过普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法. 普通相机模型畸变校正函数针对OpenCV中的cv ...
- OpenCV两种畸变校正模型源代码分析以及CUDA实现
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包括普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法. 普通相机模型畸变校正函数针对OpenCV中的cv ...
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
相机标定 一.相机标定的目的 确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数. 二.通用摄像机模型 世界坐标系.摄像机坐标 ...
- [zt]摄像机标定(Camera calibration)笔记
http://www.cnblogs.com/mfryf/archive/2012/03/31/2426324.html 一 作用建立3D到2D的映射关系,一旦标定后,对于一个摄像机内部参数K(光心焦 ...
- OpenCV畸变校正原理以及损失有效像素原理分析
上一篇博客简要介绍了一下常用的张正友标定法的流程,其中获取了摄像机的内参矩阵K,和畸变系数D. 1.在普通相机cv模型中,畸变系数主要有下面几个:(k1; k2; p1; p2[; k3[; k4; ...
- [OpenCV-Python] OpenCV 中摄像机标定和 3D 重构 部分 VII
部分 VII摄像机标定和 3D 重构 OpenCV-Python 中文教程(搬运)目录 42 摄像机标定 目标 • 学习摄像机畸变以及摄像机的内部参数和外部参数 • 学习找到这些参数,对畸变图像进行修 ...
- 机器视觉学习笔记(5)——基于OpenCV的单目摄像机标定
本文CameraCalibrator类源代码来自于OpenCV2 计算机视觉编程手册(Robert Laganiere 著 张静 译) 强烈建议阅读机器视觉学习笔记(4)--单目摄像机标定参数说明之后 ...
随机推荐
- 求一些数字字符参数的和(Java)
一.思路 输入数字(字符型)参数: 将字符型强制转化为整数型: 求和: 输出: 二.流程图 三.源程序代码及结果
- gradle_学习_02_gradle多模块构建实例
一.前言 二.多模块构建 1.工程结构 父工程:weixin-service 子模块:weixin-gz weixin-qy 2.父工程 weixin-service (1)build.gradle ...
- Oracle 11g 客户端连接 oracle 10g 服务端,乱码问题
从网上搜索资料基本确定:字符集错误 Pl/sql 连接到oracle 数据库 “select userenv('language') from dual” 找到服务端的对应的字符集,拷贝之: 到本 ...
- UVA - 10570 Meeting with Aliens (置换的循环节)
给出一个长度不超过500的环状排列,每次操作可以交换任意两个数,求把这个排列变成有序的环状排列所需的最小操作次数. 首先把环状排列的起点固定使其成为链状排列a,枚举排好序时的状态b(一种有2n种可能) ...
- UVA - 11019 Matrix Matcher (二维字符串哈希)
给你一个n*m的矩阵,和一个x*y的模式矩阵,求模式矩阵在原矩阵中的出现次数. 看上去是kmp在二维情况下的版本,但单纯的kmp已经无法做到了,所以考虑字符串哈希. 类比一维情况下的哈希算法,利用容斥 ...
- CodeForces - 633H :Fibonacci-ish II(正解:莫对+线段树)
Yash is finally tired of computing the length of the longest Fibonacci-ish sequence. He now plays ar ...
- LeetCode Base 7
原题链接在这里:https://leetcode.com/problems/base-7/#/description 题目: Given an integer, return its base 7 s ...
- 二、python沉淀之路~~字符串属性(str)
1.capitalize的用法:即将输出字符串首字母大写 test = "heLLo" v = test.capitalize() print(v) 结果:Hello. 2.cas ...
- webpack学习(一)—— 入门
,我们通常采用的是组件化开发方式,这样就会对应有很多个js文件,而打包工具的出现则是为了正确处理这些js文件的依赖关系,并生成一个最终的文件,这样,我们最后只需要加载打包以后的文件就可以了,而无须加载 ...
- nodejs express mysql