3. OpenCV-Python——图像梯度算法、边缘检测、图像金字塔与轮廓检测、直方图与傅里叶变换
一、图像梯度算法
1、图像梯度-Sobel算子

dst = cv2.Sobel(src, ddepth, dx, dy, ksize)
- ddepth:图像的深度
- dx和dy分别表示水平和竖直方向
- ksize是Sobel算子的大小
# *******************图像梯度算法**********************开始
import cv2
# import numpy as np img = cv2.imread('pie.png',cv2.IMREAD_GRAYSCALE)
cv2.imshow("img",img)
cv2.waitKey()
cv2.destroyAllWindows() # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows() # Sobel算子——x轴
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3) # 计算水平的
cv_show(sobelx,'sobelx') # 白到黑是正数,黑到白就是负数了,所有的负数会被截断成0,所以要取绝对值
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx) # 取绝对值
cv_show(sobelx,'sobelx') # Sobel算子——y轴
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely) # 取绝对值
cv_show(sobely,'sobely') # 求和
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0) # 按权重计算
cv_show(sobelxy,'sobelxy') # 也有直接计算xy轴的————不推荐使用
# sobelxy=cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3)
# sobelxy = cv2.convertScaleAbs(sobelxy)
# cv_show(sobelxy,'sobelxy')
# *******************图像梯度算法**********************结束
用lena图像来实际操作一下:
# *******************图像梯度算法-实际操作**********************开始
import cv2 # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows() img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
cv_show(img,'img') # 分别计算x和y
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show(sobelxy,'sobelxy')
# *******************图像梯度算法-实际操作**********************结束


2、图像梯度-Scharr和Laplacian算子
(1)Scharr算子

(2)Laplacian算子
(3)不同算子之间的差距
# *******************图像梯度算子-Scharr+laplacian**********************开始
import cv2
import numpy as np #不同算子的差异
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0) scharrx = cv2.Scharr(img,cv2.CV_64F,1,0)
scharry = cv2.Scharr(img,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0) laplacian = cv2.Laplacian(img,cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian) res = np.hstack((sobelxy,scharrxy,laplacian)) # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
cv_show(res,'res')
# *******************图像梯度算子-Scharr+laplacian**********************结束

二、边缘检测
Canny边缘检测
1) 使用高斯滤波器,以平滑图像,滤除噪声。
2) 计算图像中每个像素点的梯度强度和方向。
3) 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
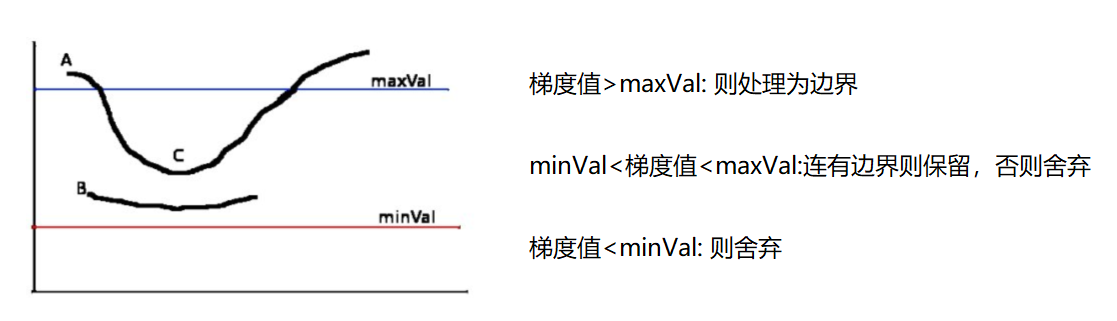
4) 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5) 通过抑制孤立的弱边缘最终完成边缘检测。
1、高斯滤波器
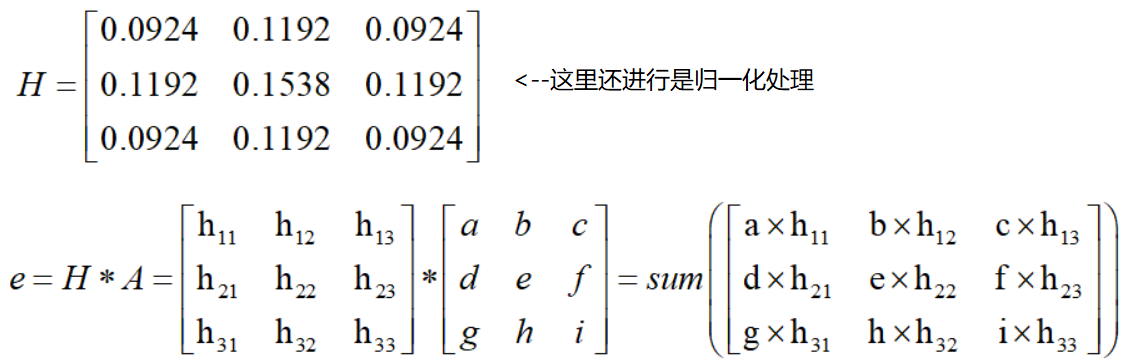
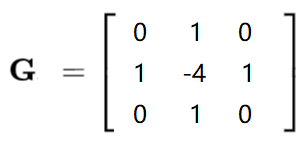
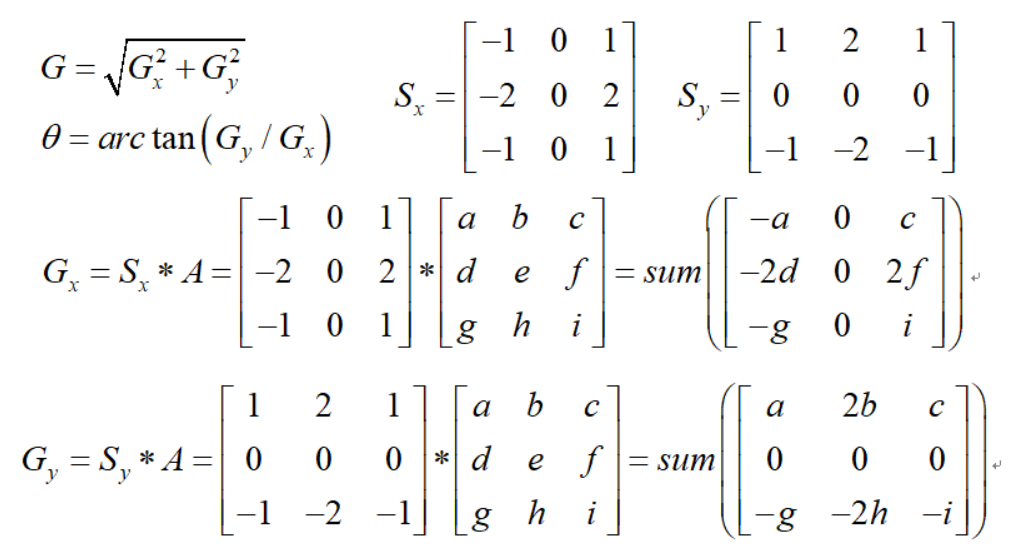
2、梯度和方向
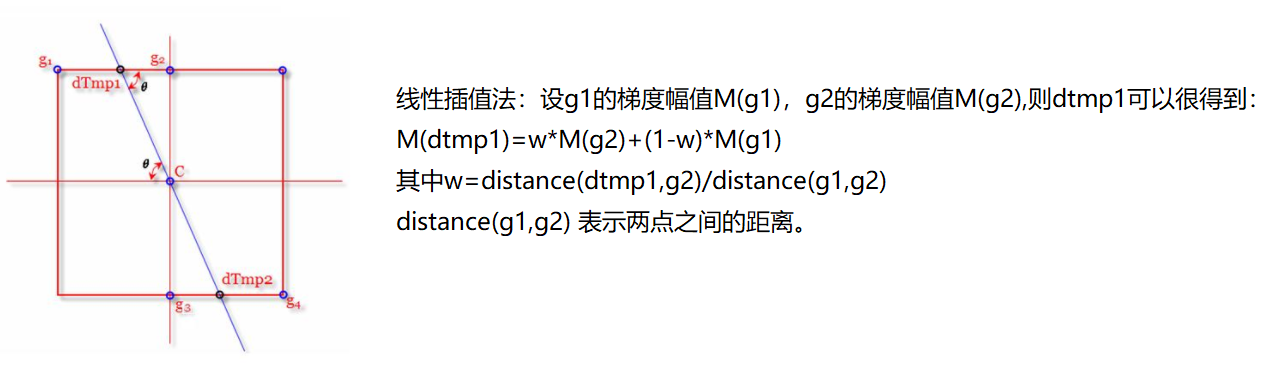
3、非极大值抑制

4、双阈值检测
# *******************边缘检测**********************开始
import cv2
import numpy as np img=cv2.imread("lena.jpg",cv2.IMREAD_GRAYSCALE) v1=cv2.Canny(img,80,150) # 设置双阈值 最小和最大
v2=cv2.Canny(img,50,100) res = np.hstack((v1,v2)) # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
cv_show(res,'res')
# *******************边缘检测**********************结束

三、图像金字塔
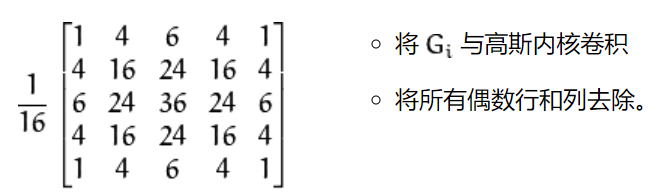
1、高斯金字塔
(1)高斯金字塔:向下采样方法(缩小)
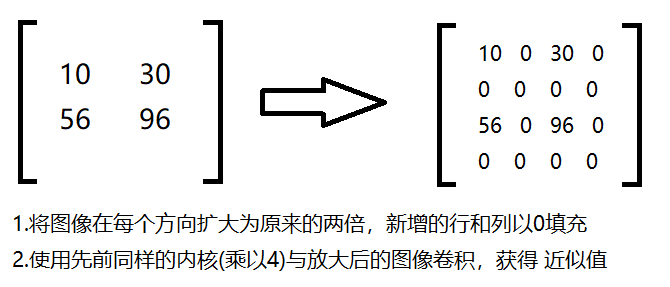
(2)高斯金字塔:向上采样方法(放大)
# *******************图像金字塔--高斯金字塔**********************开始
import cv2
import numpy as np # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows() img=cv2.imread("AM.png")
# cv_show(img,'img')
print (img.shape) # 高斯金字塔-上采样 (可执行多次)
up=cv2.pyrUp(img)
# cv_show(up,'up')
print (up.shape) # 高斯金字塔-下采样 (可执行多次)
down=cv2.pyrDown(img)
# cv_show(down,'down')
print (down.shape) # 高斯金字塔-先上采样再下采样 (会损失信息-变模糊)
up=cv2.pyrUp(img)
up_down=cv2.pyrDown(up)
# cv_show(up_down,'up_down')
cv_show(np.hstack((img,up_down)),'up_down')
# *******************图像金字塔--高斯金字塔**********************结束

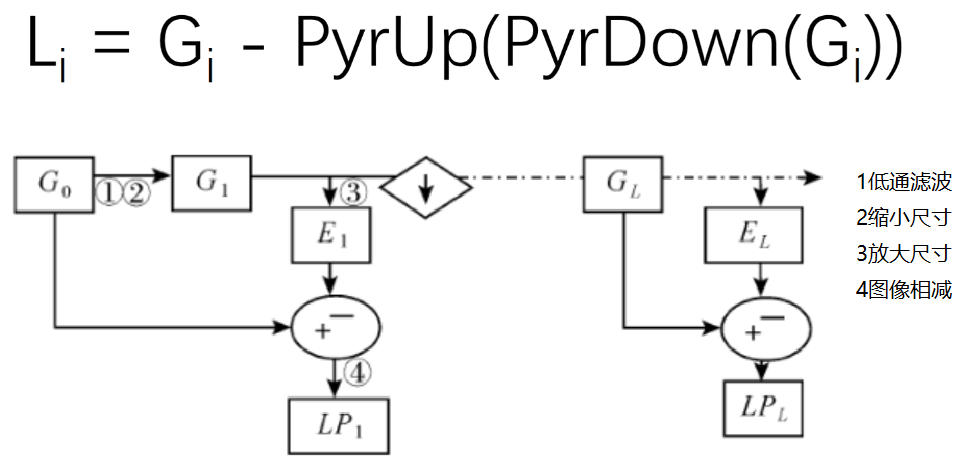
2、拉普拉斯金字塔
# *******************图像金字塔-拉普拉斯金字塔**********************开始
import cv2
import numpy as np # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows() img=cv2.imread("AM.png")
down=cv2.pyrDown(img)
down_up=cv2.pyrUp(down)
l_1=img-down_up
cv_show(l_1,'l_1')
# *******************图像金字塔-拉普拉斯金字塔**********************结束
四、图像轮廓
cv2.findContours(img,mode,method)
mode:轮廓检索模式
- RETR_EXTERNAL :只检索最外面的轮廓;
- RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
- RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
- RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次;
method:轮廓逼近方法
- CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
- CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
为提高准确性,使用二值图像。
1、轮廓检测及绘制
# *******************图像轮廓**********************开始
import cv2
import numpy as np # 读入图像转换为二值图像
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转换为灰度图
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 转换成二值图 # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
# cv_show(thresh,'thresh') # 轮廓检测 第一个就是二值的结果 第二个是一堆轮廓点 第三个是层级
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 绘制轮廓
draw_img = img.copy() # 注意需要copy,要不原图会变。。。
res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2) # 传入绘制图像,轮廓,轮廓索引(-1全部),颜色模式,线条厚度
# cv_show(res,'res') draw_img = img.copy()
res = cv2.drawContours(draw_img, contours, 2, (0, 0, 255), 2)
cv_show(res,'res')
# *******************图像轮廓**********************结束

2、轮廓特征
import cv2 # 读入图像转换为二值图像
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转换为灰度图
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 转换成二值图 # 轮廓检测 第一个就是二值的结果 第二个是一堆轮廓点 第三个是层级
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 绘制轮廓
draw_img = img.copy()
res = cv2.drawContours(draw_img, contours, 2, (0, 0, 255), 2) # 轮廓特征
cnt = contours[0] # 获取轮廓
print(cv2.contourArea(cnt)) # 计算面积
print(cv2.arcLength(cnt, True)) # 计算周长,True表示闭合的
3、轮廓近似

import cv2
img = cv2.imread('contours2.png')
# 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
# 二值+轮廓检测
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
# 轮廓绘制
draw_img = img.copy()
res = cv2.drawContours(draw_img, [cnt], -1, (0, 0, 255), 2)
# cv_show(res,'res')
# 轮廓近似
epsilon = 0.05*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)
draw_img = img.copy()
res = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2)
cv_show(res,'res')

(1)边界矩形
# *******************图像轮廓-边界矩形**********************开始
import cv2 # 显示图像函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows() img = cv2.imread('contours.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0] # 边界矩形
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
cv_show(img,'img')
# 轮廓面积与边界矩形比
area = cv2.contourArea(cnt)
x, y, w, h = cv2.boundingRect(cnt)
rect_area = w * h
extent = float(area) / rect_area
print ('轮廓面积与边界矩形比',extent)
# *******************图像轮廓-边界矩形**********************结束
(2)外接圆
# 外接圆
(x,y),radius = cv2.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
img = cv2.circle(img,center,radius,(0,255,0),2)
cv_show(img,'img')
3. OpenCV-Python——图像梯度算法、边缘检测、图像金字塔与轮廓检测、直方图与傅里叶变换的更多相关文章
- OpenCV4系列之图像梯度和边缘检测
在图像处理中,求解图像梯度是常用操作. Sobel算子 Calculates the first, second, third, or mixed image derivatives using an ...
- 机器学习进阶-图像金字塔与轮廓检测-轮廓检测 1.cv2.cvtColor(图像颜色转换) 2.cv2.findContours(找出图像的轮廓) 3.cv2.drawContours(画出图像轮廓) 4.cv2.contourArea(轮廓面积) 5.cv2.arcLength(轮廓周长) 6.cv2.aprroxPloyDP(获得轮廓近似) 7.cv2.boudingrect(外接圆)..
1. cv2.cvtcolor(img, cv2.COLOR_BGR2GRAY) # 将彩色图转换为灰度图 参数说明: img表示输入的图片, cv2.COLOR_BGR2GRAY表示颜色的变换形式 ...
- OpenCV Python教程(1、图像的载入、显示和保存)
原文地址:http://blog.csdn.net/sunny2038/article/details/9057415 转载请详细注明原作者及出处,谢谢! 本文是OpenCV 2 Computer ...
- 机器学习进阶-图像金字塔与轮廓检测-模板匹配(单目标匹配和多目标匹配)1.cv2.matchTemplate(进行模板匹配) 2.cv2.minMaxLoc(找出矩阵最大值和最小值的位置(x,y)) 3.cv2.rectangle(在图像上画矩形)
1. cv2.matchTemplate(src, template, method) # 用于进行模板匹配 参数说明: src目标图像, template模板,method使用什么指标做模板的匹配 ...
- 机器学习进阶-图像金字塔与轮廓检测-图像金字塔-(**高斯金字塔) 1.cv2.pyrDown(对图片做向下采样) 2.cv2.pyrUp(对图片做向上采样)
1.cv2.pyrDown(src) 对图片做向下采样操作,通常也可以做模糊化处理 参数说明:src表示输入的图片 2.cv2.pyrUp(src) 对图片做向上采样操作 参数说明:src表示输入的 ...
- Python+OpenCV图像处理(十二)—— 图像梯度
简介:图像梯度可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导. Sobel算子是普通一阶差分,是基于寻找梯度强度.拉普拉斯算子(二阶差分)是基于过零点检测.通过计算梯度,设置阀值, ...
- opencv python:图像梯度
一阶导数与Soble算子 二阶导数与拉普拉斯算子 图像边缘: Soble算子: 二阶导数: 拉普拉斯算子: import cv2 as cv import numpy as np # 图像梯度(由x, ...
- opencv学习笔记(六)---图像梯度
图像梯度的算法有很多方法:sabel算子,scharr算子,laplacian算子,sanny边缘检测(下个随笔)... 这些算子的原理可参考:https://blog.csdn.net/poem_q ...
- 14、OpenCV实现图像的空间滤波——图像锐化及边缘检测
1.图像锐化理论基础 1.锐化的概念 图像锐化的目的是使模糊的图像变得清晰起来,主要用于增强图像的灰度跳变部分,这一点与图像平滑对灰度跳变的抑制正好相反.而且从算子可以看出来,平滑是基于对图像领域的加 ...
随机推荐
- Java 常用API(二)
目录 Java 常用API(二) 1. Object类 2. Date类 概述 构造方法和成员方法 3. DateFormat类 概述 SimpleDateFormat类 练习 4. Calendar ...
- GUI_DOWNLOAD 下载乱码
状况: 开发者打开正常,跨公司或跨企业打开异常. 跨App上传格式异常. 解决上述问题步骤: 1.用浏览器或可改变文件编码格式切换的软件打开文件(其他app上传正常文档格式,或跨公司打开正常文件)查看 ...
- Node教程——封装一个token验证器
重要说明 这个轮子是 使用 express@5.0 + MongoDB构建起来的一个 node后台通用的验证器,里面主要讲的就是使用jwt,token进行验证,当然你想使用session也没问题,但是 ...
- Tomcat服务器的下载与安装,修改端口号
安装及简单配置Tomcat服务器: 1.登录www.apache.org 网站,之后点击Projects , 点击Project List,找到Tomcat. 2.点击Tomcat之后,之后进入Tom ...
- [vijos P1008 篝火晚会]置换
题意:编号1-n的小朋友依次围成一圈,给定目标状态每个小朋友左右两边的小朋友编号,每次可以选择编号为[b1,b2,...,bm]的小朋友,作1次轮换,bi是任意编号,代价为m.求变成目标状态所需的最小 ...
- 盘点6个Kubernetes监视工具
导读:监控可帮助您确保Kubernetes应用程序平稳运行并排除可能出现的任何问题.Prometheus是一种流行的开源监视工具,许多公司都使用它来监视其IT基础结构.但是,还有许多其他监视工具可用. ...
- WordPress安装:零基础入门教程
WordPress安装:零基础入门教程 1主机空间要求要运行 WordPress,主机空间需满足以下条件.不过现在网络上的空间基本都可以,而且还让你随意定制Php和Mysql版本,至于空间和数据库大小 ...
- 【clear linux】intel clear linux 电源状态命令
# 重启系统 $ sudo systemctl reboot # 关闭系统,切断电源 $ sudo systemctl poweroff # CPU停止工作 $ sudo systemctl halt ...
- 解决 Loaded plugins: fastestmirror
其大概意思是fastestmirror不能使用,fastestmirror是yum的一个加速插件,具体我也没有仔细了解过,可能是系统不支持或者缺少组建导致的.处理办法就是禁用这个插件,方法如下:roo ...
- 【雕爷学编程】Arduino动手做(49)---有源蜂鸣器模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的.鉴于本人手头积累了一些传感器和模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备 ...