ROS naviagtion analysis: costmap_2d--Layer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493113
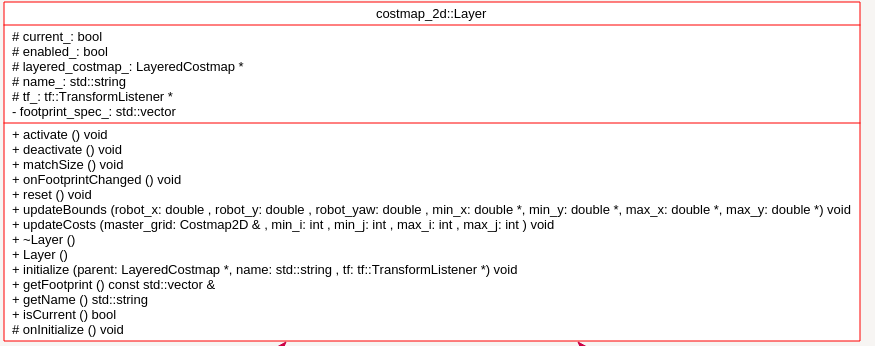
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。 这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类型的map,反正都有同样的方法名。
以下是这个类实现的两个方法,其他的方法基本上都是virtual ,要求子类实现。
void Layer::initialize(LayeredCostmap* parent, std::string name, tf::TransformListener *tf)
{
layered_costmap_ = parent;
name_ = name;
tf_ = tf;
onInitialize();
} const std::vector<geometry_msgs::Point>& Layer::getFootprint() const
{
return layered_costmap_->getFootprint();
}
重要的几个virtual方法:
virtual void updateBounds(double robot_x, double robot_y, double robot_yaw, double* min_x, double* min_y,
double* max_x, double* max_y) {} /**
* @brief Actually update the underlying costmap, only within the bounds
* calculated during UpdateBounds().
*/
virtual void updateCosts(Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) {} /** @brief Stop publishers. */
virtual void deactivate() {} /** @brief Restart publishers if they've been stopped. */
virtual void activate() {} virtual void reset() {}
这个类就这么多内容,接下来进入真正干活的几个类分析:
ObstacleLayer
InflationLayer
StaticLayer
VoxelLayer
ROS naviagtion analysis: costmap_2d--Layer的更多相关文章
- ROS naviagtion analysis: costmap_2d--Costmap2DROS
博客转载自:https://blog.csdn.net/u013158492/article/details/50485418 在上一篇文章中moveBase就有关于costmap_2d的使用: pl ...
- ROS naviagtion analysis: move_base
博客转载自:https://blog.csdn.net/u013158492/article/details/50483123 这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解 ...
- ROS naviagtion analysis: costmap_2d--ObstacleLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493676 构造函数 ObstacleLayer() { costmap_ = NU ...
- ROS naviagtion analysis: costmap_2d--StaticLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493246 从UML中能够看到,StaticLayer主要是在实现Layer层要求实 ...
- ROS naviagtion analysis: costmap_2d--LayeredCostmap
博客转自:https://blog.csdn.net/u013158492/article/details/50490490 在数据成员中,有两个重要的变量:Costmap2D costmap_和 s ...
- ROS naviagtion analysis: costmap_2d--CostmapLayer
博客转自:https://blog.csdn.net/u013158492/article/details/50493220 这个类是为ObstacleLayer StaticLayer voxelL ...
- ROS naviagtion analysis: costmap_2d--Costmap2D
博客转载自:https://blog.csdn.net/u013158492/article/details/50492506 Costmap2D是存储地图数据的父类.真正的地图数据就存储在数据成员u ...
- ROS 教程之 navigation :在 catkin 环境下创建costmap layer plugin
在做机器人导航的时候,肯定见到过global_costmap和local_costmap.global_costmap是为了全局路径规划服务的,如从这个房间到那个房间该怎么走.local_costma ...
- ROS探索总结(十三)——导航与定位框架
导航与定位是机器人研究中的重要部分. 一般机器人在陌生的环境下需要使用激光传感器(或者深度传感器转换成激光数据),先进行地图建模,然后在根据建立的地图进行导航.定位.在ROS中也有很多 ...
随机推荐
- 9.9 Python 文档字符串
9.9 Python 文档字符串. 进入 Python 标准库所在的目录. 检查每个 .py 文件看是否有__doc__ 字符串, 如果有, 对其格式进行适当的整理归类. 你的程序执行完毕后, 应该会 ...
- ARP表 MAC表 路由表
ARP表是一个动态表,存储在计算机当中,目的是做一个ip地址与mac地址的对应.假设在同一子网段,计算机A与计算机B通信计算机A的ip地址192.168.0.1 MAC地址AA-AA-AA-AA-AA ...
- python操作RabbitMQ(不错)
一.rabbitmq RabbitMQ是一个在AMQP基础上完整的,可复用的企业消息系统.他遵循Mozilla Public License开源协议. MQ全称为Message Queue, 消息队列 ...
- 一个工程实例来学习 Makefile
March 3, 2015 8:19 PM Makefile 文件的编写 学习前的准备 需要准备的工程目录结构如下: . ├── add │ ├── add_float.c │ ├── add ...
- Verilog-2001新增特性
l generate语句 Verilog-2001添加了generate循环,允许产生 module和primitive的多个实例化,同时也可以产生多个variable,net,task,functi ...
- php 权限 管理
权限的思考: https://www.jianshu.com/p/cf9077a7d38a 权限例子,用户 角色 功能 用户角色关联表 角色功能关联表 http://www.cnblogs.com/n ...
- 苹果手机 iTunes 资料备份到另一手机
百度教程 https://jingyan.baidu.com/article/d621e8da332e602865913f8e.html 直接使用iTunes将老手机的资料备份, (可能需要关闭手机定 ...
- git 统计命令
git log --author='user' --pretty=tformat: --numstat --since='2018-01-01' --before='2018-10-10' | gaw ...
- php小白和菜鸟 上班路上可以看的修行博客
上班地铁 公交上我们不要去追剧 不要去打游戏 不要看看有效性的海量新闻, 我们需要去技术博客里遨游, 下面就推荐点与php有关的可以学习的技术博客; 大部分程序员在自学的道路上不知道走了多少坑,这个视 ...
- Java-Runoob:Java 条件语句
ylbtech-Java-Runoob:Java 条件语句 1.返回顶部 1. Java 条件语句 - if...else 一个 if 语句包含一个布尔表达式和一条或多条语句. 语法 if 语句的语法 ...