[深度学习] fast-reid入门教程
fast-reid入门教程
ReID,全拼为Re-identification,目的是利用各种智能算法在图像数据库中找到与要搜索的目标相似的对象。ReID是图像检索的一个子任务,本质上是图像检索而不是图像分类。fast-reid是一个强悍的目标重识别Reid开源库,由京东开源管理。本文主要是介绍fast-reid的使用,随着技术的发展,对于cv从业人员有必要了解不同智能算法技术的应用。而且ReID是相对下游的任务,了解ReID的相关技术应用能学到很多东西。
文章目录
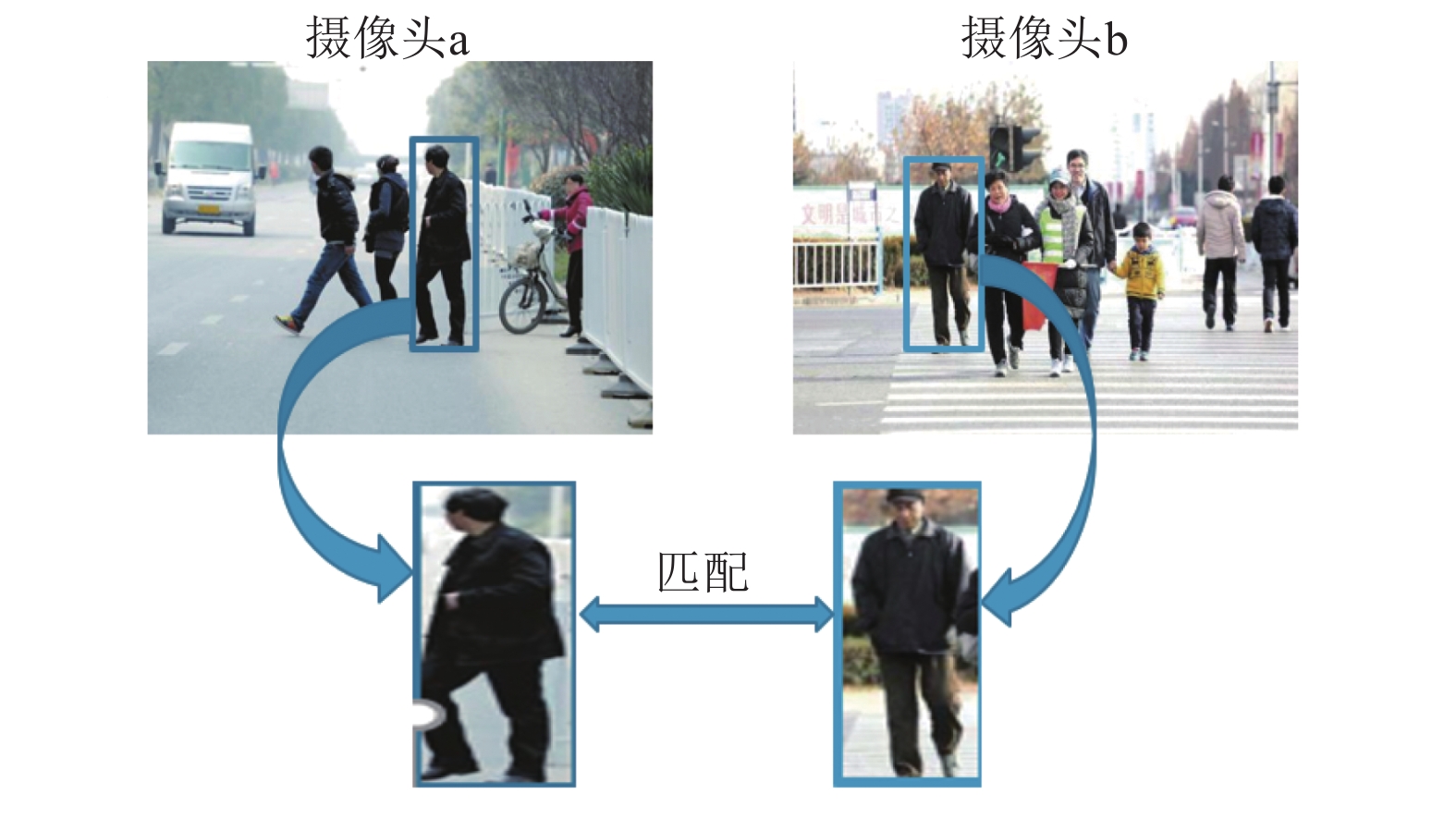
以行人重识别Person re-identification为例,行人重识别主要目的是针对出现在监控摄像头内的某个目标行人,准确快速地从监控网络其他摄像头内的大量行人中将这个目标行人标识出来。如下图所示(图片来自网络)。
工程上,最简单的行人重识别的技术流程如下所示。
行人检测(目标识别) --> 特征提取 --> 行人跟踪(目标跟踪)--> 跨镜头行人跟踪 --> 向量存储与检索
简单的一个技术解决方案为:
- 行人检测:通过Yolov5这类目标模型提取当前帧的行人图像。
- 特征提取:基于特征提取模型,如通过faster-reid基于度量学习训练得到的模型提取行人区域图片的特征向量。
- 目标跟踪:结合行人区域特征,通过deepsort进行行人跟踪
- 跨镜头行人跟踪:基于深度学习的全局特征和数据关联实现跨镜头行人目标跟踪。
- 向量存储与检索:对于给定的行人查询向量,与行人特征库中所有的待查询向量进行向量检索,即计算特征向量间的相似度。通常我们可以通过faiss处理这部分的操作。
在以上步骤中,特征提取是最关键的一环,它的作用是将输入的行人图片转化为固定维度的特征向量,以用于后续的目标跟踪和向量检索。好的特征需要具备良好的相似度保持性,即在特征空间中,相似度高的图片之间的向量距离比较近,而相似度低的图片对的向量距离比较远。通常用于训练这种模型的方式叫做度量学习,度量学习很简单可以自己查查。
fast-reid是一个面向学术界和工业界的ReID工具箱,是京东的开源项目之一。如果想要了解更多关于fast-reid的信息,可以直接去看作者的论文FastReID: A Pytorch Toolbox for Real-world Person Re-identification。fast-reid基于python和pytorch实现各种模型,同时提供一些脚本将pytorch训练的模型转到caffe和TensorRT上。所以非常推荐使用fast-reid进行学习。
fast-reid是一个很不错的ReID工具箱,提供了丰富的代码接口,但是代码有许多小bug,使用的时候要多注意。本文只介绍了fast-reid的基础使用,没有进一步的介绍fast-red的工程项目,以及相关的理论知识。关于fast-reid的使用,最好多单步调试进入源代码,可以学到很多的东西。fast-reid项目中提供的工程示例代码也是值得一看的。
结合行人重识别和目标检测与跟踪的项目,可以看看下面的文章:
详细介绍FastReID各部分代码结构的文章,可以看看:
本文所有代码见:
github: Python-Study-Notes
1 fast-reid介绍
1.1 fast-reid安装与项目结构
本文主要介绍fast-reid的基础使用,度量学习和ReID最新技术建议学习相关论文。本文的项目运行环境为Ubuntu18.01,Python3.8,Pytorch1.8.1+cu102。
对于fast-reid首先去官方仓库下载对应的代码到本地,仓库地址:fast-reid,然后安装对应的Python库。具体代码如下:
git clone https://github.com/JDAI-CV/fast-reid
cd fast-reid
python3 -m pip install -r docs/requirements.txt
关于fast-reid开源项目结构如下图所示:

其中最主要的是configs文件夹,fastreid文件夹,projects文件夹,tools文件夹和MODEL_ZOO.md。configs文件夹提供了不同模型的结构和训练实现脚本。fastreid文件夹提供了fast-reid的源代码实现。projects提供了一些基于fast-reid的项目代码,里面所有的项目代码非常有用,建议都跑跑。tools文件夹提供了模型训练和部署代码。MODEL_ZOO.md提供了不同数据集下的预训练模型,可以down下来跑一跑。
此外为了加速索引速度,进入fast-reid/fastreid/evaluation/rank_cylib/目录,输入make all编译文件以加速查询。如果发现编译所使用的python版本不是系统默认版本,比如我用的是python3.8,需要修改Makefile文件。如下所示:
all:
# python3 setup.py build_ext --inplace
python3.8 setup.py build_ext --inplace
rm -rf build
clean:
rm -rf build
rm -f rank_cy.c *.so
1.2 数据集和预训练模型
1.2.1 数据集介绍
在fast-reid/datasets/目录提供了不同数据集的信息。可以自行下载。这里介绍其中最常用的Market-1501数据集。
Market-1501是用于行人重识别的大规模公共基准数据集。它包含由6个不同的摄像机捕获的1501个行人,以及32,668个行人图像边界框。数据集分为两部分:其中750人的图像用于训练,其余751人的图像用于测试。在官方测试协议中,选择3,368个查询图像作为查询集query,以在包含19,732张参考图像的gallery图像集中找到正确匹配。
Market-1501
├── bounding_box_test (750人的19732张图像用于测试)
├── -1_c1s1_000401_03.jpg
├── 0071_c6s2_072893_01.jpg
├── 0071_c6s2_072918_02.jpg
├── bounding_box_train (751人的12936张图像用于训练)
├── 0002_c1s1_000451_03.jpg
├── 0002_c1s1_000801_01.jpg
├── 0430_c5s1_109673_01.jpg
├── gt_bbox (25259张图像手动标注)
├── 0001_c1s1_001051_00.jpg
├── 0001_c1s2_041171_00.jpg
├── 0933_c6s2_110943_00.jpg
├── gt_query (matlab格式,用于判断一个query的哪些图片是好的匹配和不好的匹配)
├── 0001_c1s1_001051_00_good.mat
├── 0794_c2s2_086182_00_good.mat
├── 0001_c1s1_001051_00_junk.mat
├── query (750人的3368张图像用于查询)
├── 0001_c1s1_001051_00.jpg
├── 0001_c2s1_000301_00.jpg
├── 0001_c3s1_000551_00.jpg
└── readme.txt
图像命名规则
以0071_c6s2_072893_01.jpg 为例
- 0071 表示当前行人的编号,编号范围为-1到1501,-1表示不包含在这1501人中的行人,0000表示背景;
- c6 表示当前摄像机的编号,共有6个摄像机;
- s2 表示当前摄像机的第几个片段,每个摄像机都有多个录像片段;
- 072893 表示c6s2的第072893帧图片,视频帧率为25fps;
- 01 表示0071_c6s2_072893这一帧上的第1个检测框,00表示手工标注框。
数据集使用
通常都是用度量学习的方式来使用Market-1501数据集。一般使用bounding_box_train,bounding_box_tes和query数据集中的图像进行模型训练和测试。
- bounding_box_train:用来训练模型,使模型能够学习该集合的图像特征。
- bounding_box_test:用来提供度量学习中的gallery数据。
- query:与gallery中的数据进行距离匹配以测试模型的好坏。
1.2.2 预训练模型
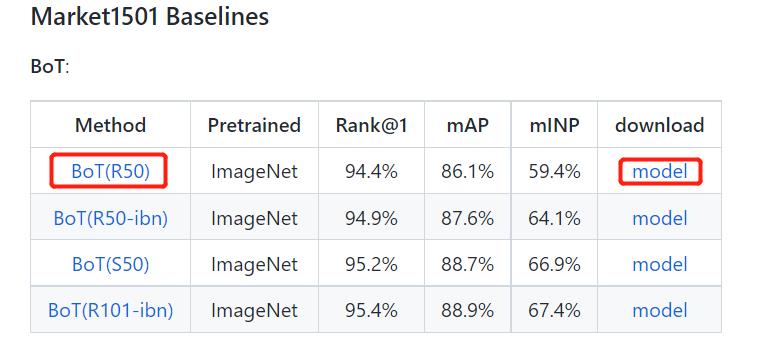
在fast-reid/MODEL_ZOO.md文件下提供了不同数据集下不同方法得到的sota模型。以最简单的Bot在Market1501中训练ResNet50模型为例。点击Method下的链接会转到模型配置文件路径,点击download会下载对应的预训练模型(大概300MB)。
对于对应的config路径位于fast-reid/configs目录下,所用到的文件有两个:
configs
├── Market1501
├── bagtricks_R50.yml
├── Base-bagtricks.yml
代码运行时会把Base-bagtricks.yml和bagtricks_R50.yml合并在一起。模型训练测试推理就是靠这两个文件,当然你可以手动把这两个文件并在一起。具体文件修改可以后续看看不同的config文件和官方代码,自己摸索摸索就可以入手。
Base-bagtricks.yml
MODEL:
META_ARCHITECTURE: Baseline
BACKBONE: # 模型骨干结构
NAME: build_resnet_backbone
NORM: BN
DEPTH: 50x
LAST_STRIDE: 1
FEAT_DIM: 2048
WITH_IBN: False
PRETRAIN: True
HEADS: # 模型头
NAME: EmbeddingHead
NORM: BN
WITH_BNNECK: True
POOL_LAYER: GlobalAvgPool
NECK_FEAT: before
CLS_LAYER: Linear
LOSSES: # 训练loss
NAME: ("CrossEntropyLoss", "TripletLoss",)
CE:
EPSILON: 0.1
SCALE: 1.
TRI:
MARGIN: 0.3
HARD_MINING: True
NORM_FEAT: False
SCALE: 1.
INPUT: # 模型输入图像处理方式
SIZE_TRAIN: [ 256, 128 ]
SIZE_TEST: [ 256, 128 ]
REA:
ENABLED: True
PROB: 0.5
FLIP:
ENABLED: True
PADDING:
ENABLED: True
DATALOADER: # 模型读取图像方式
SAMPLER_TRAIN: NaiveIdentitySampler
NUM_INSTANCE: 4
NUM_WORKERS: 8
SOLVER: # 模型训练配置文件
AMP:
ENABLED: True
OPT: Adam
MAX_EPOCH: 120
BASE_LR: 0.00035
WEIGHT_DECAY: 0.0005
WEIGHT_DECAY_NORM: 0.0005
IMS_PER_BATCH: 64
SCHED: MultiStepLR
STEPS: [ 40, 90 ]
GAMMA: 0.1
WARMUP_FACTOR: 0.1
WARMUP_ITERS: 2000
CHECKPOINT_PERIOD: 30
TEST: # 模型测试配置
EVAL_PERIOD: 30
IMS_PER_BATCH: 128
CUDNN_BENCHMARK: True
MODEL:
META_ARCHITECTURE: Baseline
BACKBONE: # 模型骨干结构
NAME: build_resnet_backbone
NORM: BN
DEPTH: 50x
LAST_STRIDE: 1
FEAT_DIM: 2048
WITH_IBN: False
PRETRAIN: True
HEADS: # 模型头
NAME: EmbeddingHead
NORM: BN
WITH_BNNECK: True
POOL_LAYER: GlobalAvgPool
NECK_FEAT: before
CLS_LAYER: Linear
LOSSES: # 训练loss
NAME: ("CrossEntropyLoss", "TripletLoss",)
CE:
EPSILON: 0.1
SCALE: 1.
TRI:
MARGIN: 0.3
HARD_MINING: True
NORM_FEAT: False
SCALE: 1.
INPUT: # 模型输入图像处理方式
SIZE_TRAIN: [ 256, 128 ]
SIZE_TEST: [ 256, 128 ]
REA:
ENABLED: True
PROB: 0.5
FLIP:
ENABLED: True
PADDING:
ENABLED: True
DATALOADER: # 模型读取图像方式
SAMPLER_TRAIN: NaiveIdentitySampler
NUM_INSTANCE: 4
NUM_WORKERS: 8
SOLVER: # 模型训练配置文件
AMP:
ENABLED: True
OPT: Adam
MAX_EPOCH: 120
BASE_LR: 0.00035
WEIGHT_DECAY: 0.0005
WEIGHT_DECAY_NORM: 0.0005
IMS_PER_BATCH: 64
SCHED: MultiStepLR
STEPS: [ 40, 90 ]
GAMMA: 0.1
WARMUP_FACTOR: 0.1
WARMUP_ITERS: 2000
CHECKPOINT_PERIOD: 30
TEST: # 模型测试配置
EVAL_PERIOD: 30
IMS_PER_BATCH: 128
CUDNN_BENCHMARK: True
bagtricks_R50.yml
注意我加了预训练模型路径。
_BASE_: ../Base-bagtricks.yml # 链接父目录下的Base-bagtricks.yml
DATASETS:
NAMES: ("Market1501",) # 数据集路径
TESTS: ("Market1501",) # 测试集路径
OUTPUT_DIR: logs/market1501/bagtricks_R50 # 输出结果路径
MODEL:
WEIGHTS: model/market_bot_R50.pth # 预训练模型路径,这句是我自己加的
2 fast-reid基础使用
这里我的示例代码结构如下所示,个人习惯为了方便调试和后续接口使用,和官方仓库不一样,实际可以不这样用。
├── configs(配置文件路径)
├── Market1501
├── bagtricks_R50.yml
├── Base-bagtricks.yml
├── datasets(数据集目录)
├── Market-1501-v15.09.15 (这个数据集名不要改)
├── bounding_box_test (750人的19732张图像用于测试)
├── bounding_box_train (751人的12936张图像用于训练)
├── query (750人的3368张图像用于查询)
├── fastreid
├── model(预训练模型目录),下载好的预训练模型存放在这
├── demo.py(提取图像的特征,并保存),来自原来的demo目录
├── predictor.py (模型加载文件),来自原来的demo目录
├── train_net.py (模型训练与测试封装版代码),来自原来的tools目录
├── visualize_result.py (可视化特征提取结果),来自原来的demo目录
重点关注几个py文件,我直接挪到根目录下了。还有模型文件的保存路径,config预训练模型地址,数据集的名字也要注意的。各个文件具体使用可以看看下面介绍,都有代码注释。
特别注意,py文件为了方便调试,我直接在代码里面设置了args的参数,实际使用要特别注意。
demo.py
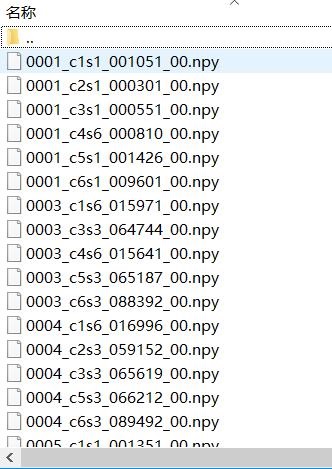
这个代码就是加载模型(调用predictor.py),提取查询图像的特征,并保存为npy文件。保存在demo_output文件夹下,一张图像对一个npy文件。这些包含特征向量的npy文件可供后续向量检索使用。
# encoding: utf-8
"""
@author: liaoxingyu
@contact: sherlockliao01@gmail.com
提取图像的特征,并保存
"""
import argparse
import glob
import os
import sys
import torch.nn.functional as F
import cv2
import numpy as np
import tqdm
from torch.backends import cudnn
sys.path.append('.')
from fastreid.config import get_cfg
from fastreid.utils.logger import setup_logger
from fastreid.utils.file_io import PathManager
from predictor import FeatureExtractionDemo
# import some modules added in project like this below
# sys.path.append("projects/PartialReID")
# from partialreid import *
cudnn.benchmark = True
setup_logger(name="fastreid")
# 读取配置文件
def setup_cfg(args):
# load config from file and command-line arguments
cfg = get_cfg()
# add_partialreid_config(cfg)
cfg.merge_from_file(args.config_file)
cfg.merge_from_list(args.opts)
cfg.freeze()
return cfg
def get_parser():
parser = argparse.ArgumentParser(description="Feature extraction with reid models")
parser.add_argument(
"--config-file", # config路径,通常包含模型配置文件
metavar="FILE",
help="path to config file",
)
parser.add_argument(
"--parallel", # 是否并行
action='store_true',
help='If use multiprocess for feature extraction.'
)
parser.add_argument(
"--input", # 输入图像路径
nargs="+",
help="A list of space separated input images; "
"or a single glob pattern such as 'directory/*.jpg'",
)
parser.add_argument(
"--output", # 输出结果路径
default='demo_output',
help='path to save features'
)
parser.add_argument(
"--opts",
help="Modify config options using the command-line 'KEY VALUE' pairs",
default=[],
nargs=argparse.REMAINDER,
)
return parser
def postprocess(features):
# Normalize feature to compute cosine distance
features = F.normalize(features) # 特征归一化
features = features.cpu().data.numpy()
return features
if __name__ == '__main__':
args = get_parser().parse_args() # 解析输入参数
# 调试使用,使用的时候删除下面代码
# ---
args.config_file = "./configs/Market1501/bagtricks_R50.yml" # config路径
args.input = "./datasets/Market-1501-v15.09.15/query/*.jpg" # 图像路径
# ---
cfg = setup_cfg(args) # 读取cfg文件
demo = FeatureExtractionDemo(cfg, parallel=args.parallel) # 加载特征提取器,也就是加载模型
PathManager.mkdirs(args.output) # 创建输出路径
if args.input:
if PathManager.isdir(args.input[0]): # 判断输入的是否为路径
# args.input = glob.glob(os.path.expanduser(args.input[0])) # 原来的代码有问题
args.input = glob.glob(os.path.expanduser(args.input)) # 获取输入路径下所有的文件路径
assert args.input, "The input path(s) was not found"
for path in tqdm.tqdm(args.input): # 逐张处理
img = cv2.imread(path)
feat = demo.run_on_image(img) # 提取图像特征
feat = postprocess(feat) # 后处理主要是特征归一化
np.save(os.path.join(args.output, os.path.basename(path).split('.')[0] + '.npy'), feat) # 保存图像对应的特征,以便下次使用
visualize_result.py
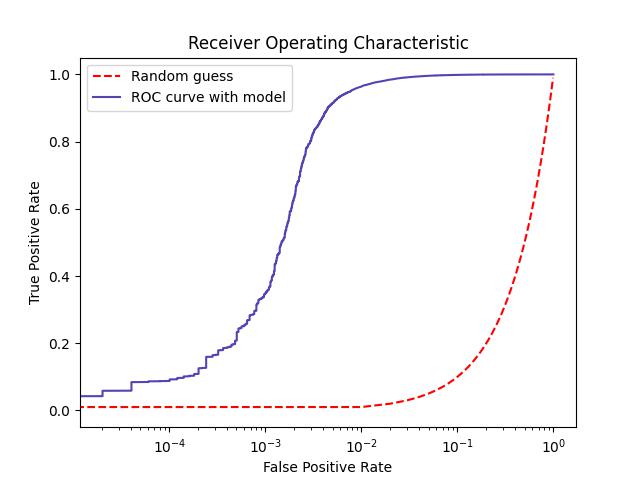
这个代码就是加载模型(调用predictor.py),提取查询图像的特征,计算模型的各个精度指标。输出模型的ROC结果图,以及某张图像的匹配结果图像。输出目录为vis_rank_list。
ROC结果图如下图所示,ROC曲线下的面积AUC越大,表示模型效果越好。top1精度93.37左右。
某张图像的匹配结果图像如下所示。每张图有1张查询图和5张查询结果图,左1为查询图像,其他为查询结果图。蓝色框表示查询结果错误,红色框表示查询结果正确。在查询结果图上有标题,比如0.976/false/cam1,表示当前查询结果图像和查询图像特征距离为0.976,查询结果为false(查询错误),该查询结果来自cam1摄像头。查询图像上的标题,如0.9967/cam2,这里0.9967表示查询图像的查询结果精度指标,cam2表示查询图像来自cam2摄像头。


# encoding: utf-8
"""
@author: xingyu liao
@contact: sherlockliao01@gmail.com
可视化特征提取结果
"""
import argparse
import logging
import sys
import numpy as np
import torch
import tqdm
from torch.backends import cudnn
sys.path.append('.')
import torch.nn.functional as F
from fastreid.evaluation.rank import evaluate_rank
from fastreid.config import get_cfg
from fastreid.utils.logger import setup_logger
from fastreid.data import build_reid_test_loader
from predictor import FeatureExtractionDemo
from fastreid.utils.visualizer import Visualizer
# import some modules added in project
# for example, add partial reid like this below
# sys.path.append("projects/PartialReID")
# from partialreid import *
cudnn.benchmark = True
setup_logger(name="fastreid")
logger = logging.getLogger('fastreid.visualize_result')
# 读取配置文件
def setup_cfg(args):
# load config from file and command-line arguments
cfg = get_cfg()
# add_partialreid_config(cfg)
cfg.merge_from_file(args.config_file)
cfg.merge_from_list(args.opts)
cfg.freeze()
return cfg
def get_parser():
parser = argparse.ArgumentParser(description="Feature extraction with reid models")
parser.add_argument(
"--config-file", # config路径,通常包含模型配置文件
metavar="FILE",
help="path to config file",
)
parser.add_argument(
'--parallel', # 是否并行
action='store_true',
help='if use multiprocess for feature extraction.'
)
parser.add_argument(
"--dataset-name", # 数据集名字
help="a test dataset name for visualizing ranking list."
)
parser.add_argument(
"--output", # 输出结果路径
default="./vis_rank_list",
help="a file or directory to save rankling list result.",
)
parser.add_argument(
"--vis-label", # 输出结果是否查看
action='store_true',
help="if visualize label of query instance"
)
parser.add_argument(
"--num-vis", # 挑选多少张图像用于结果展示
default=1000,
help="number of query images to be visualized",
)
parser.add_argument(
"--rank-sort", # 结果展示是相似度排序方式,默认从小到大排序
default="ascending",
help="rank order of visualization images by AP metric",
)
parser.add_argument(
"--label-sort", # label结果展示是相似度排序方式,默认从小到大排序
default="ascending",
help="label order of visualization images by cosine similarity metric",
)
parser.add_argument(
"--max-rank", # 显示topk的结果,默认显示前10个结果
default=5,
help="maximum number of rank list to be visualized",
)
parser.add_argument(
"--opts",
help="Modify config options using the command-line 'KEY VALUE' pairs",
default=[],
nargs=argparse.REMAINDER,
)
return parser
if __name__ == '__main__':
args = get_parser().parse_args()
# 调试使用,使用的时候删除下面代码
# ---
args.config_file = "./configs/Market1501/bagtricks_R50.yml" # config路径
args.dataset_name = 'Market1501' # 数据集名字
args.vis_label = False # 是否显示正确label结果
args.rank_sort = 'descending' # 从大到小显示关联结果
args.label_sort = 'descending' # 从大到小显示关联结果
# ---
cfg = setup_cfg(args)
# 可以直接在代码中设置cfg中设置模型路径
# cfg["MODEL"]["WEIGHTS"] = './configs/Market1501/bagtricks_R50.yml'
test_loader, num_query = build_reid_test_loader(cfg, dataset_name=args.dataset_name) # 创建测试数据集
demo = FeatureExtractionDemo(cfg, parallel=args.parallel) # 加载特征提取器,也就是加载模型
logger.info("Start extracting image features")
feats = [] # 图像特征,用于保存每个行人的图像特征
pids = [] # 行人id,用于保存每个行人的id
camids = [] # 拍摄的摄像头,行人出现的摄像头id
# 逐张保存读入行人图像,并保存相关信息
for (feat, pid, camid) in tqdm.tqdm(demo.run_on_loader(test_loader), total=len(test_loader)):
feats.append(feat)
pids.extend(pid)
camids.extend(camid)
feats = torch.cat(feats, dim=0) # 将feats转换为tensor的二维向量,向量维度为[图像数,特征维度]
# 这里把query和gallery数据放在一起了,需要切分query和gallery的数据
q_feat = feats[:num_query]
g_feat = feats[num_query:]
q_pids = np.asarray(pids[:num_query])
g_pids = np.asarray(pids[num_query:])
q_camids = np.asarray(camids[:num_query])
g_camids = np.asarray(camids[num_query:])
# compute cosine distance 计算余弦距离
q_feat = F.normalize(q_feat, p=2, dim=1)
g_feat = F.normalize(g_feat, p=2, dim=1)
distmat = 1 - torch.mm(q_feat, g_feat.t()) # 这里distmat表示两张图像的距离,越小越接近
distmat = distmat.numpy()
# 计算各种评价指标 cmc[0]就是top1精度,应该是93%左右,这里精度会有波动
logger.info("Computing APs for all query images ...")
cmc, all_ap, all_inp = evaluate_rank(distmat, q_pids, g_pids, q_camids, g_camids)
logger.info("Finish computing APs for all query images!")
visualizer = Visualizer(test_loader.dataset) # 创建Visualizer类
visualizer.get_model_output(all_ap, distmat, q_pids, g_pids, q_camids, g_camids) # 保存结果
logger.info("Start saving ROC curve ...") # 保存ROC曲线
fpr, tpr, pos, neg = visualizer.vis_roc_curve(args.output)
visualizer.save_roc_info(args.output, fpr, tpr, pos, neg)
logger.info("Finish saving ROC curve!")
logger.info("Saving rank list result ...") # 保存部分查询图像的关联结果,按照顺序排列
query_indices = visualizer.vis_rank_list(args.output, args.vis_label, args.num_vis,
args.rank_sort, args.label_sort, args.max_rank)
logger.info("Finish saving rank list results!")
train_net.py
这段代码调用config文件,训练或者测试模型。训练模型设置args.eval_only = False,反之为测试模型。测试模型结果如下图所示。代码封装的很不错,把该有的测试指标都贴上去了。

另外这是封装过多的代码,如果想知道清晰的训练代码查看fast-reid/tools/plain_train_net.py,这个文件提供了详细没有封装过多的训练代码。
#!/usr/bin/env python
# encoding: utf-8
"""
@author: sherlock
@contact: sherlockliao01@gmail.com
模型训练与测试封装版代码
"""
import sys
sys.path.append('.')
from fastreid.config import get_cfg
from fastreid.engine import DefaultTrainer, default_argument_parser, default_setup, launch
from fastreid.utils.checkpoint import Checkpointer
# 读取配置文件
def setup(args):
"""
Create configs and perform basic setups.
"""
cfg = get_cfg()
cfg.merge_from_file(args.config_file)
cfg.merge_from_list(args.opts)
cfg.freeze()
default_setup(cfg, args)
return cfg
def main(args):
cfg = setup(args)
# 模型测试
if args.eval_only:
cfg.defrost()
cfg.MODEL.BACKBONE.PRETRAIN = False
model = DefaultTrainer.build_model(cfg)
# 加载预训练模型
Checkpointer(model).load(cfg.MODEL.WEIGHTS) # load trained model
res = DefaultTrainer.test(cfg, model)
return res
# 模型训练
trainer = DefaultTrainer(cfg)
trainer.resume_or_load(resume=args.resume)
return trainer.train()
if __name__ == "__main__":
args = default_argument_parser().parse_args()
# 调试使用,使用的时候删除下面代码
# ---
args.config_file = "./configs/Market1501/bagtricks_R50.yml" # config路径
args.eval_only = True # 是否测试模型,False表示训练模型,True表示测试模型
# ---
print("Command Line Args:", args)
launch(
main,
args.num_gpus,
num_machines=args.num_machines,
machine_rank=args.machine_rank,
dist_url=args.dist_url,
args=(args,),
)
3 参考
3.1 代码库
3.2 文档
- FastReID: A Pytorch Toolbox for Real-world Person Re-identification
- 行人重识别 ReID
- 详解ReID的各部分组成及Trick——基于FastReID
[深度学习] fast-reid入门教程的更多相关文章
- 总结笔记 | 深度学习之Pytorch入门教程
笔记作者:王博Kings 目录 一.整体学习的建议 1.1 如何成为Pytorch大神? 1.2 如何读Github代码? 1.3 代码能力太弱怎么办? 二.Pytorch与TensorFlow概述 ...
- 腾讯QQ会员技术团队:人人都可以做深度学习应用:入门篇(下)
四.经典入门demo:识别手写数字(MNIST) 常规的编程入门有"Hello world"程序,而深度学习的入门程序则是MNIST,一个识别28*28像素的图片中的手写数字的程序 ...
- 【腾讯Bugly干货分享】人人都可以做深度学习应用:入门篇
导语 2016年,继虚拟现实(VR)之后,人工智能(AI)的概念全面进入大众的视野.谷歌,微软,IBM等科技巨头纷纷重点布局,AI 貌似将成为互联网的下一个风口. 很多开发同学,对人工智能非常感兴趣, ...
- 分享《机器学习实战基于Scikit-Learn和TensorFlow》中英文PDF源代码+《深度学习之TensorFlow入门原理与进阶实战》PDF+源代码
下载:https://pan.baidu.com/s/1qKaDd9PSUUGbBQNB3tkDzw <机器学习实战:基于Scikit-Learn和TensorFlow>高清中文版PDF+ ...
- 萌新深度学习与Pytorch入门记录(一):Win10下环境安装
深度学习从入门到入土,安装软件及配置环境踩了不少坑,过程中参考了多处博主给的解决方法,遂整合一下自己的采坑记录. (若遇到不一样的错误,请参考其他博主答案解决) 笔者电脑系统为win10系统,在此环境 ...
- 深度学习开发环境搭建教程(Mac篇)
本文将指导你如何在自己的Mac上部署Theano + Keras的深度学习开发环境. 如果你的Mac不自带NVIDIA的独立显卡(例如15寸以下或者17年新款的Macbook.具体可以在"关 ...
- 深度学习:Keras入门(一)之基础篇
1.关于Keras 1)简介 Keras是由纯python编写的基于theano/tensorflow的深度学习框架. Keras是一个高层神经网络API,支持快速实验,能够把你的idea迅速转换为结 ...
- 深度学习、图像识别入门,从VGG16卷积神经网络开始
刚开始接触深度学习.卷积神经网络的时候非常懵逼,不知道从何入手,我觉得应该有一个进阶的过程,也就是说,理应有一些基本概念作为奠基石,让你有底气去完全理解一个庞大的卷积神经网络: 本文思路: 一.我认为 ...
- 深度学习:Keras入门(一)之基础篇【转】
本文转载自:http://www.cnblogs.com/lc1217/p/7132364.html 1.关于Keras 1)简介 Keras是由纯python编写的基于theano/tensorfl ...
- 深度学习:Keras入门(一)之基础篇(转)
转自http://www.cnblogs.com/lc1217/p/7132364.html 1.关于Keras 1)简介 Keras是由纯python编写的基于theano/tensorflow的深 ...
随机推荐
- 谣言检测()《Data Fusion Oriented Graph Convolution Network Model for Rumor Detection》
论文信息 论文标题:Data Fusion Oriented Graph Convolution Network Model for Rumor Detection论文作者:Erxue Min, Yu ...
- C++运算符重载(简单易懂)
转载:https://www.cnblogs.com/liuchenxu123/p/12538623.html 运算符重载,就是对已有的运算符重新进行定义,赋予其另一种功能,以适应不同的数据类型. 你 ...
- centos7搭建安装loki、promtail、Grafana日志系统
loki.promtail.Grafana安装包 链接:https://pan.baidu.com/s/1vkSa_KYrXM0UEI8i42KdaA 提取码:4d4q 如果安装失败或者下载速度慢可以 ...
- 成功解决IDEA中建立新项目Maven会默认选择配置(图解详细说明)
文章目录 1.File-->Other Settings --> Settings for New Projects 2.选择自己的maven配置 3.效果展示(我这里省略建立新项目的过程 ...
- JavaScript中通过按回车键进行数据的录入
1.代码 <!DOCTYPE html> <html> <head> <meta charset="utf-8" /> <ti ...
- Springboot JSON 转换:Jackson篇
本案例基于 Springboot 2.5.7 单元测试场景下进行 <!-- SpringMVC默认使用Jacson,只需要引用web启动器即可,无序单独引用Jackson --> < ...
- python深拷贝、浅拷贝
.copy() 浅拷贝 如上图 定义列表A指向一个元素,列表A里面嵌套两层列表分布指向两个元素,定义列表B,列表B=A,列表C浅拷贝列表A 从图上可以看出,列表A和列表B指向的是同一个列表元素,而 ...
- 一、SQL介绍
Mysql 简单来说,数据库就是一个存储数据的仓库,它将数据按照特定的规律存储在磁盘上.为了方便用户组织和管理数据,其专门提供了数据库管理系统.通过数据库管理系统,用户可以有效的组织和管理存储在数据库 ...
- ES6 学习笔记(八)基本类型Symbol
1.前言 大家都知道,在ES5的时候JavaScript的基本类型有Number.String.Boolean.undefined.object.Null共6种,在es6中,新增了Symbol类型,用 ...
- 开源项目在线化 中文繁简体转换/敏感词/拼音/分词/汉字相似度/markdown 目录
前言 以前在 github 上自己开源了一些项目.碍于技术与精力,大部分项目都是 java 实现的. 这对于非 java 开发者而言很不友好,对于不会编程的用户更加不友好. 为了让更多的人可以使用到这 ...